一种基于姿态信息的可控震源车工作点定位误差补偿方法
文献发布时间:2023-06-19 11:02:01
技术领域
本发明涉及一种减小可控震源车在倾斜地形下工作点定位误差的方法,具体涉及一种基于姿态信息的可控震源车工作点定位误差补偿方法,属于地球物理勘探技术领域。
背景技术
可控震源车是一种广泛应用于地质调查、石油勘探等领域的大型铰接式工程车辆。可控震源车通过一个与大地紧密耦合的振动平板在特定的工作点产生一组连续震动信号,通过对震动回波信号的接收与分析以获取地质构造信息,其工作方式绿色高效,具有广阔的应用前景。
可控震源车的工作点由技术人员提前设定,工作点定位误差定义为可控震源车作业过程中振动平板中心与工作点的平面欧氏距离。工作点定位误差的大小直接关系到回波数据的质量,进而影响到地质构造信息分析的准确性。因此,如何减小工作点定位误差,对提高可控震源车作业质量具有重要意义。
目前,振动平板中心依靠安装于振动平板中心顶部的GNSS定位天线直接获取其位置信息,通过计算获取该点与工作点的平面距离,从而获得工作点定位误差。驾驶员以工作点定位误差为依据,驾驶可控震源车准确停到工作点进行工作。由于可控震源车车身高度以及GNSS定位天线安装高度较高,在倾斜地形下GNSS定位天线的定位位置与振动平板中心实际位置存在一定的偏差,从而产生工作点定位误差。
现有的解决方法多是驾驶员依靠经验,根据地形倾斜程度继续行驶一段距离以弥补误差。这种方法严重依赖人工经验,结果具有很大的不确定性,尤其是在地形倾斜程度较大的情况下,这种方法更不具有可信性。目前为止,还未见有对可控震源车工作点定位误差进行定量补偿的方案出现。
因此,希望有一种基于姿态信息的可控震源车工作点定位误差补偿方法,定量地精确弥补工作点定位误差。
发明内容
本发明的目的是针对地形因素带来的可控震源车工作点定位误差的技术问题,提出一种基于姿态信息的可控震源车工作点定位误差补偿方法。该方法能根据车体姿态信息定量计算倾斜地形下工作点定位误差,有效提高工作点定位精度。
本发明的创新点在于:
利用可控震源车GNSS航向信息与铰接角信息,建立“后车体坐标-大地坐标”转换关系模型。通过安装于振动平板顶部的姿态传感器,精确获取车辆横滚角与俯仰角。建立GNSS定位信息与振动平板中心实际位置的转换关系模型,获得振动平板中心在后车体坐标系下的位置。利用上述“后车体坐标-大地坐标”转换关系模型得出振动平板中心在大地坐标系下的精确定位信息,定量补偿工作点定位误差。
为实现上述目的,本发明提出了一种基于姿态信息的可控震源车工作点定位误差补偿方法,包括以下步骤:
步骤1:建立可控震源车整车坐标系Ψ
步骤2:建立可控震源车后车坐标系Ψ
步骤3:建立后车坐标系Ψ
步骤4:求取振动平板中心在后车坐标系Ψ
步骤5:依据步骤3所建立的Ψ
步骤6:计算P
进一步地,步骤1具体包括以GNSS定位天线为坐标原点建立整车二维右手坐标系Ψ
进一步地,步骤2具体包括以GNSS定位天线为坐标原点建立后车二维右手坐标系Ψ
进一步地,步骤3具体包括以下几部分内容:
步骤3.1:建立Ψ
Ψ
(P
其中,T表示矩阵转置,T
其中,θ
步骤3.2:建立Ψ
Ψ
(P
其中,T表示矩阵转置,T
其中,θ
步骤3.3:在步骤3.1与步骤3.2的基础上,建立Ψ
Ψ
(P
其中,T表示矩阵转置,T
进一步地,步骤4具体包括求取振动平板在后车坐标系Ψ
其中,α为姿态传感器测得的车辆俯仰角、β为横滚角,h为振动平板提起时GNSS定位天线距离地面的垂直高度。
有益效果
与现有的依靠人工经验进行可控震源车工作点定位误差补偿的方案相比,本发明所提出的方法具有以下优势:
通过建立“后车体坐标-大地坐标”转换关系模型,计算出振动平板中心在大地坐标系下的坐标,以此代替GNSS直接定位信息进行定位误差计算,以定量形式精确补偿了地形因素导致的可控震源车工作点定位精度误差。
附图说明
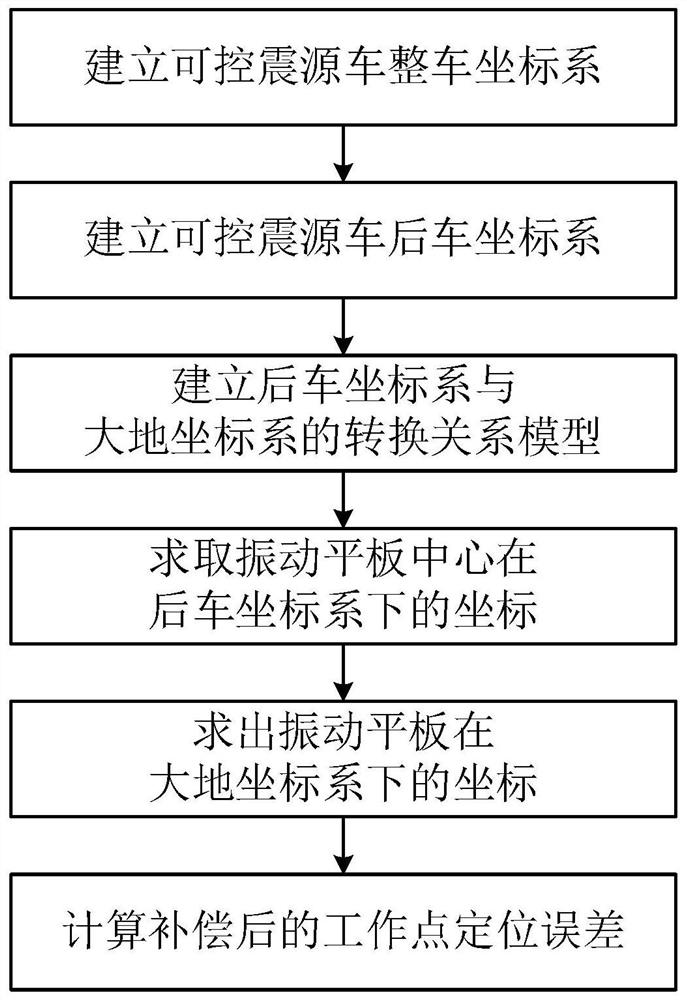
图1为基于姿态信息的可控震源车工作点定位误差补偿方法流程图;
图2为可控震源车转向示意图;
图3为倾斜地形下可控震源车工作点定位误差示意图;
图4为姿态传感器安装示意图。
图中,1-GNSS定向天线位置,2-可控震源车铰接点位置,3-GNSS定位天线位置,4-GNSS定位天线安装位置,5-振动平板中心实际位置,6-GNSS直接定位位置。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
如图1所示,一种基于姿态信息的可控震源车工作点定位误差补偿方法,包括以下步骤:
步骤1:建立可控震源车整车坐标系Ψ
如图2所示,以GNSS定位天线为原点,建立二维右手坐标系O
步骤2:建立可控震源车后车坐标系Ψ
如图2所示,以GNSS定位天线为原点建立二维右手坐标系O
步骤3:建立后车坐标系Ψ
具体地,包括以下步骤:
步骤3.1:如图2所示,θ
(P
其中,T表示矩阵转置,T
步骤3.2:如图2所示,θ
其中,l
在得到θ
(P
其中,T表示矩阵转置,T
步骤3.3:在步骤3.1与步骤3.2的基础上,求出Ψ
(P
其中,T表示矩阵转置,T
经过步骤3,得到后车坐标系下任意一点在大地坐标系下的位置。
步骤4:如图3所示,因地形倾斜的因素,振动平板中心的实际位置与GNSS直接定位位置并不一致,需要求出二维水平面上振动平板中心实际位置在后车坐标系Ψ
通过安装于振动平板顶部的姿态传感器,获取当前路况下可控震源车俯仰角α、横滚角β。
依据下式,计算二维水平面上振动平板中心实际位置在后车坐标系Ψ
需要说明的是,上述P
步骤5:根据步骤3.3所建立的Ψ
(P
其中,T表示矩阵转置,T
步骤6:计算P
最后,将E
- 一种基于姿态信息的可控震源车工作点定位误差补偿方法
- 一种基于地磁信息的旋转炮弹转速测量误差补偿方法