一种球形关节锁紧装置及控制单元
文献发布时间:2023-06-19 11:06:50
技术领域
本发明涉及智能机器人领域,具体涉及一种球形关节锁紧装置及控制单元。
背景技术
1987年,全球第一例腹腔镜胆囊切除术成功完成,揭开了微创技术发展的新篇章。随之涌现出了大量先进的手术器械,推动了微创技术的发展进程并慢慢走向成熟。和传统的手术相比,创伤小、疼痛轻、恢复快的微创手术治疗在临床广泛使用,微创手术技术已成为代表医学发展的新方向。
现有技术中,传统的微创内窥镜手术器械均为细长杆结构,通过病人组织壁(例如腹腔、胸腔等)上的小切口将手术器械(例如,持针器、分离钳、手术刀、剪刀等)送入体内,医生通过操作长杆近端的把手控制长杆远端的手术器械。由于传统手术器械仅有单自由度,加上杠杆作用,医生很难实现复杂、精准的操作。还有一种是以“Da Vinci”为代表的主从分离式微创手术系统,整体结构复杂、单台成本高、使用成本高;体积庞大,需要专用的大型手术室;操作复杂,医生需经过专业的培训才可掌握操作,到精通仍需很长的学习曲线。
如专利号为CN201480053589.X的申请公开了一种用于医学装置的控制单元,其中公开了:控制单元包括使用者接口,使用者接口包含手掌接口,内球形主体被固定到底座并含有操纵杆传感器,两个半球形零件彼此连接并含有内球形主体,因此形成球窝接头/万向接头,圆柱形物将棒与零件的顶表面连接。当装配时,两个半球形零件形成的整体可以绕零件旋转,从而使操纵杆传感器的棒旋转,球窝接头内具有制动机构,制动机构可以由使用者激活以将关节“冻结”于所要定向,电机驱动球形制动件向上运动,以接合零件以将摩擦力施加到其并防止其相对于零件旋转,电机使制动件移向半球形零件,当控制单元检测到足够制动力被施加在半球形零件上时,自动停用电机以便停止手掌接口的枢转调动。通过上述结构可实现对手掌接口的两个相对旋转的零件的相对位置的锁定,但其采用电机驱动制动件上升的方式以施加摩擦力到两个半球形零件构成的整体,制动件与两个半球型零件构成的整体的接触面积是变化的,半球型零件的制动受力不均匀;此外,还需设置控制器和传感结构来判断制动力的大小,部件多,结构复杂,且电控方式易出现不稳定情况。
发明内容
为了解决现有技术中存在的控制单元的锁紧装置结构复杂、稳定性差的技术问题,本发明提出一种球形关节锁紧装置及控制单元,解决了上述技术问题。本发明的技术方案如下:
一种球形关节锁紧装置,所述球形关节包括相互配合的球形套和球头件,所述锁紧装置包括:载体,所述球形套固定设置在所述载体上;动力机构,包括驱动装置和两个连杆,两个所述连杆铰接设置在所述载体上,两个所述连杆在驱动装置的作用下同步靠近或远离所述球头件;锁紧件,所述锁紧件设置在所述连杆的自由端,两个锁紧件在所述连杆的带动下同步夹紧或远离所述球头件。
通过设置锁紧装置与球形套均设置在载体上,锁紧装置摆动锁紧球形件,可实现球形套和球形件之间的锁止,使球形套和球形件之间保持在某一状态而不发生改变;此外,相较于现有技术中,球形套和球形件之间位于不同的偏转位置,锁紧装置和球形套之间的接触面积会发生变化,因此两者之间的作用力会发生变化,故需要设置传感结构和控制结构来保证锁紧力;本申请的锁紧装置采用的是锁紧球形件的方式进行锁紧,而不管球形套和球形件之间怎么偏转,锁紧装置与球形件之间的接触面的形状和面积大小保持恒定,故锁紧装置在相同状态下对球形件的锁紧力相同,因此可省去传感结构和控制结构,简化结构;更进一步地,在省去传感结构和控制结构的情况下,本申请的锁紧装置采用的是连杆机械驱动结构,相较于电控结构,稳定性好,使用寿命长。
进一步地,所述连杆的驱动端到铰接点的距离大于所述连杆的自由端到铰接点的距离。
进一步地,所述动力机构还包括限位结构,所述限位结构包括设置在所述连杆上的限位孔和限位件,所述限位件被固定设置,所述限位件穿过所述限位孔以限定所述连杆的摆动范围。
进一步地,所述驱动装置包括驱动件、丝杆和螺母,所述驱动件驱动所述丝杆转动,所述丝杆与两个所述螺母配合,两个螺母沿所述丝杆同步相向或相背运动,两个螺母分别带动两个连杆摆动。
进一步地,所述螺母与所述连杆通过长孔和凸起配合进行活动连接。
进一步地,所述锁紧件与所述连杆的自由端铰接,每个所述锁紧件包括至少两个分支触角,所述分支触角的接触端与所述球头件的形状相适应。
进一步地,所述球形套的开口处对应所述锁紧件开有缺口,锁紧状态下,所述锁紧件的两个分支触角抵靠在对应的所述缺口的两端。
一种控制单元,包括:上述的球形关节锁紧装置和球形关节,所述球头件的球头端内设置有摇杆传感器,所述摇杆传感器的摇杆伸出所述球头端与所述球形套固定连接,所述摇杆传感器获取所述球头件和所述球形套相对偏转的电信号。
进一步地,所述载体具有容纳空间,所述球形套、球头件的球头端和所述锁紧装置容纳在所述载体内,所述载体的外部形状与人体手掌相适应。
基于上述技术方案,本发明所能实现的技术效果为:
1.本发明的球形关节锁紧装置,通过设置锁紧装置与球形套均设置在载体上,锁紧装置摆动锁紧球形件,可实现球形套和球形件之间的锁止,使球形套和球形件之间保持在某一状态而不发生改变;此外,相较于现有技术中,球形套和球形件之间位于不同的偏转位置,锁紧装置和球形套之间的接触面积会发生变化,因此两者之间的作用力会发生变化,故需要设置传感结构和控制结构来保证锁紧力;本申请的锁紧装置采用的是锁紧球形件的方式进行锁紧,而不管球形套和球形件之间怎么偏转,锁紧装置与球形件之间的接触面的形状和面积大小保持恒定,故锁紧装置在相同状态下对球形件的锁紧力相同,因此可省去传感结构和控制结构,简化结构;更进一步地,在省去传感结构和控制结构的情况下,本申请的锁紧装置采用的是连杆机械驱动结构,相较于电控结构,稳定性好,使用寿命长;
2.本发明的球形关节锁紧装置,连杆起到杠杆的作用,通过设置连杆的驱动端到铰接点的距离大于连杆的自由端到铰接点的距离,可对连杆的自由端的作用力进行放大,锁紧效果好;进一步设置动力机构包括限位结构,通过限位结构来限定连杆的摆动范围,由于锁紧的是球头件且球头件为球形,当连杆的自由端朝向球头件摆动至最大位置时,锁紧件可稳定地锁紧球头件;当连杆的自由端远离球头件摆动至最大位置时,锁紧件可松开球头件,球头件和球形套之间可相对偏转;
3.本发明的球形关节锁紧装置,通过丝杆螺母驱动两个螺母同步相向或相背运动,通过螺母和连杆之间活动连接,可实现两个螺母带动两个连杆同步夹紧或远离球头件;进一步设置锁紧件包括至少两个分支触角,分支触角的接触端与球头件的形状相适应,则锁紧装置与球头件的接触点至少为4个,可稳定锁紧球头件;此外,球形套上设置有缺口,锁紧件的两个分支触角抵靠在缺口的两端,可进一步提高锁紧的稳定性;
4.本发明的控制单元,通过在球头件内设置摇杆传感器,摇杆传感器的摇杆与球形套连接,在球形套和球头件相对偏转时,摇杆传感器可获取两者相对偏转的电信号,进而根据电信号来控制执行端的工作。
附图说明
图1为本发明的球形关节锁紧装置的外部结构示意图;
图2本发明的球形关节锁紧装置的结构示意图;
图3为本发明的球形关节锁紧装置的另一角度下的结构示意图;
图4为图3的A部放大图;
图5为驱动装置的结构示意图;
图6为连杆与锁紧件的结构示意图;
图7为本发明的控制单元的结构示意图;
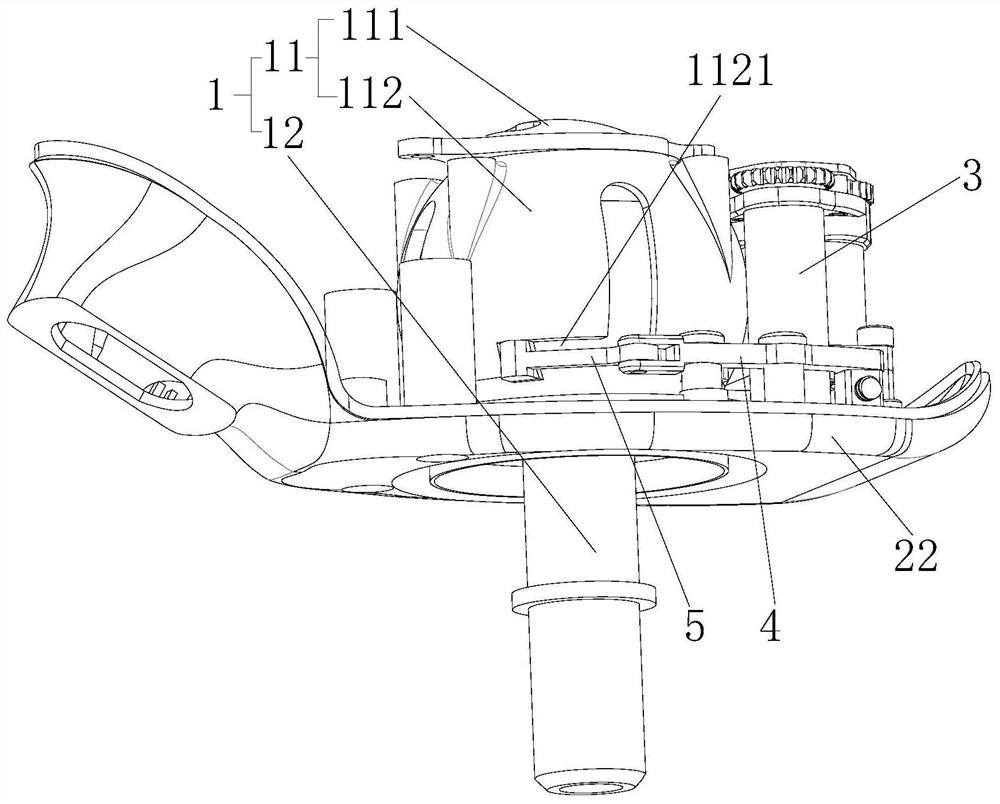
图中:1-球形关节;11-球形套;111-顶盖;112-侧球套;1121-缺口;12-球头件;121-球头端;2-载体;21-上载体;22-下载体;3-驱动装置;31-驱动组件;311-驱动件;312-减速机;313-齿轮传动组件;32-丝杆;33-螺母;331-凸起;34-伞齿轮;4-连杆;41-铰接轴;42-长孔;43-限位孔;44-限位件;5-锁紧件;51-分支触角;6-摇杆传感器;61-摇杆。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
在本发明的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
为了便于描述,在这里可以使用空间相对术语,如“在……之上”、“在……上方”、“在……上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在……上方”可以包括“在……上方”和“在……下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
此外,需要说明的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本发明保护范围的限制。
如图1-7所示,本实施例提供了一种球形关节锁紧装置,可用于锁紧球形关节1,使球形关节1保持特定状态。球形关节1包括相互配合的球形套11和球头件12,球形套11呈具有一端开口的、中空的球形,球头件12包括呈球形的球头端121,球头端121容纳于球形套11内,球头件12的另一端为杆状端,杆状端自球形套11的开口伸出,球形套11和球头件12之间可以相对偏转。锁紧装置与球形套11的相对位于不变,锁紧装置用于锁紧球头件12的球头端121,使两者不再发生偏转。
锁紧装置包括载体2、动力机构和锁紧件5,球形套11固定设置在载体2上,动力机构也设置在载体2上,动力机构带动锁紧件5同步朝向或远离球头件12的球头端121偏转,以夹紧球头件12或远离球头件12。具体地,载体2可一体成型或分体设置,本实施例中,为了方便组装,载体2设置成分体结构,载体2包括上载体21和下载体22,上载体21和下载体22构成具有容纳空间的整体,球形套11和球头件12的球头端121位于上述的容纳空间内,球形套11的上端与上载体21的内壁固定连接,球头件12的杆状端自载体2伸出。
动力机构设置在下载体22上,动力机构包括驱动装置3和连杆4,连杆4为两个,两个连杆4对称地设置在球形关节1的两侧,两个连杆4在驱动装置3的作用下同步相向或相背摆动,两个连杆4的自由端带动两个锁紧件5锁紧或远离球头件12。具体地,驱动装置3包括驱动组件31、丝杆32和螺母33,驱动组件31带动丝杆32转动,丝杆32与螺母33配合,螺母33为两个,两个螺母33带动两个连杆4相向或相背摆动。
具体地,驱动组件31包括驱动件311、减速机312和齿轮传动组件313,驱动件311可选但并不限于电机,驱动件311的驱动端通过齿轮传动组件313连接减速机312,减速机312带动丝杆32转动。优选地,减速机312的驱动端和丝杆32上均设置有伞齿轮34,通过两个伞齿轮34啮合,实现减速机312带动丝杆32转动。丝杆32的两端设置有螺纹方向相反的外螺纹,丝杆32的两端分别设置有螺母33,当丝杆32转动时,带动其两端的螺母33做相向或相反运动。除此之外,还可设置两个丝杆32,两个丝杆32上伞齿轮34与减速机312上的伞齿轮34啮合,减速机312转动可同时带动两个丝杆32反向运动,此时设置两个丝杆32上的螺纹方向相同,两个丝杆32可带动两个螺母33相向或相反运动。驱动组件31设置在下载体22上,并位于球头关节1的外侧。
两个螺母33与两个连杆4活动连接以驱动两个连杆4摆动。两个连杆4的中部通过铰接轴41铰接设置在下载体22上,两个连杆4的驱动端与两个螺母33活动连接。具体地,两个连杆4的驱动端开有长孔42,两个螺母33上设置有凸起331,通过凸起331伸入长孔42内实现螺母33和连杆4的活动连接。两个连杆4的远离驱动端的另一端为自由端,两个连杆4的自由端连接有锁紧件5,当两个螺母33带动两个连杆4相向或相背偏摆时,两个连杆4带动其上的锁紧件5夹紧或松开球头件12。优选地,连杆4的驱动端到铰接轴41的距离大于连杆4的自由端到铰接轴41的距离,以实现放大动力的作用。优选地,连杆4的驱动端至少局部呈弯折状,以减小安装体积。
为了限定两个连杆4的摆动范围,两个连杆4上还设置有限位结构,限位结构包括设置在连杆4上的限位孔43以及固定设置的限位件44,限位件44伸入到限位孔43内以限位连杆4的摆动范围。优选地,限位件44可固定设置在载体2上,限位孔43可为长孔、弧形孔或腰形孔。除了上述设置方式之外,还可将限位孔43设置在载体2上,限位件44固定在连杆4上,通过限位件44伸入限位孔43内实现限位。
锁紧件5铰接设置在连杆4的自由端,锁紧件5为分叉状,每个锁紧件5包括至少两个分支触角51,当连杆4带动锁紧件5锁紧球头件12时,所有的分支触角51与球头件12的球头端121的外表面相接。优选地,分支触角51与球头件12相接的部位采用橡胶材质,可增大两者之间的摩擦作用力。本实施例中,每个锁紧件5包括两个分支触角51。
为了进一步增强锁紧效果,球形套11的开口处设置有缺口1121,当锁紧件5锁紧球头件12时,锁紧件5的两个分支触角51可抵住缺口1121的两端,防止发生相对滑动。
优选地,为了方便组装,球形套11可为分体式结构,球形套11包括相互连接的顶盖111和侧球套112,顶盖111位于侧球套112的顶部,顶盖111与侧球套112之间固定连接。
本实施例还提供了一种控制单元,包括上述的球形关节锁紧装置和球形关节1,球头件12的球头端121呈具有开口且带有容纳空间的中空结构,球头端121内容纳有摇杆传感器6,摇杆传感器6的摇杆61自开口伸出与球形套11连接,当球形套11与球头件12之间相对偏转时,摇杆61也会发生相对偏转,从而获取偏转电信号。优选地,摇杆61与球形套11的顶盖111固定连接。
进一步地,控制单元可用于手掌操作,球形套11、球头件12的球头端121和锁紧装置均容纳在载体2内,球头件12的杆状端伸出载体2与其它结构连接,载体2的上载体21的外表面形状与人体手掌相适应,方便手掌抓握。
基于上述结构,本实施例的控制单元的工作原理如下:操作者手掌抓握在上载体21上,手掌通过载体2带动球形套11相对球头件12偏摆,摇杆传感器6的摇杆61也随之偏转,获取偏转电信号。
本实施例的控制单元可用于但不限于手术机器人,当其用于手术机器人时,通过控制单元可获得偏转电信号,手术机器人的驱动装置通过偏转电信号来驱动执行端动作。
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明的宗旨的前提下做出各种变化。
- 一种球形关节锁紧装置及控制单元
- 一种基于球形关节的压电机械手及其控制方法