一种海洋大数据处理系统
文献发布时间:2023-06-19 11:08:20
技术领域
本发明涉及到海洋大数据领域,尤其涉及一种海洋大数据处理系统。
背景技术
由于海域上有漫长的海岸线和广阔的海洋,渔船货轮星罗密布,各类目标鱼龙混杂,地理环境的限制导致现有技术中对海洋数据的采集还停留在比较初级的阶段,目前还没有比较便捷和可靠的方法可以快速简便地采集海洋数据,因此对海洋环境的数据感知以及数据分析就显得格外重要。
然而,现有技术中的海洋环境数据处理的过程中,仅通过对AIS(AutomaticIdentification System,船舶自动识别系统)和北斗,单纯地为船舶提供AIS信息,即自识别信息,没有充分对北斗和AIS信息进行融合处理,以对海域内的信息进行有效地筛选识别,也就一直无法较好地实时对海域管控。
发明内容
针对现有技术中存在的上述问题,现提供一海洋大数据处理系统,包括:
一第一获取模块,用于获取海域上所有船舶的当前运行信息;
一第二获取模块,用于获取所述船舶的历史运行信息;
一处理模块,分别连接所述第一获取模块和所述第二获取模块,用于根据所述当前运行信息和所述历史运行信息对所述船舶的下一时刻的运行信息进行预测,得到预测运行信息;
一融合模块,连接所述处理模块,用于根据所述当前运行信息和所述历史运行信息,对所述预测运行信息进行融合处理,得到所述船舶的综合运行状态;
一评估模块,连接所述融合模块,用于根据所有所述船舶的综合运行状态获取所述海域的态势评估结果。
优选的,所述处理模块包括:
一第一获取单元,用于根据所述当前运行信息和所述历史运行信息,获取所述船舶的当前位置信息和所述船舶的历史位置信息;
一位置处理单元,连接所述第一获取单元,用于根据所述历史位置信息和所述当前位置信息,对所述船舶的下一时刻的位置信息进行预测,得到预测位置信息。
优选的,所述位置处理单元采用位置卡曼滤波算法。
优选的,所述处理模块包括:
一第二获取单元,用于根据所述当前运行信息和所述历史运行信息,获取所述船舶的当前特征对应的当前特征信息和所述船舶的历史特征对应的历史特征信息;
一特征处理单元,连接所述第二获取单元,用于根据所述历史特征信息和所述当前特征信息,生成一预测特征以及对应的预测特征信息。
优选的,所述特征处理单元采用无迹卡曼滤波算法。
优选的,所述融合模块包括:
一时空校准单元,用于根据所有所述船舶的所述当前运行信息和所述历史运行信息,对所有所述船舶的所述预测运行信息进行时空校准处理,得到时空统一后的所有所述船舶的所述预测运行信息;
一信息融合单元,连接所述时空校准单元,用于根据时空统一后的所有所述船舶的所述预测运行信息判别所述船舶的功能类别,得到所有所述船舶的功能类别信息;
一跟踪单元,连接所述信息融合单元,用于根据据时空统一的所有所述船舶的所述预测运行信息,对所有所述船舶的运行轨迹进行跟踪处理,得到所述船舶的运行轨迹信息。
优选的,所述当前运行信息中包括:船舶的北斗信息;和/或自识别信息;和/或雷达信息。
优选的,还包括一优选模块,设置在所述处理模块和所述融合模块之间,用于调整所述当前运行信息。
所述处理模块,用于根据所述历史运行信息和调整后的所述当前运行信息对所述船舶的下一时刻的运行信息进行预测,得到预测运行信息。
优选的,还包括一模糊匹配模块,分别连接所述融合模块、所述第一获取模块和所述第二获取模块,用于根据所述船舶的综合运行状态对所述船舶的当前运行信息、所述船舶的历史运行信息进行模糊匹配,调整所述船舶以及所述综合运行状态之间的匹配关系。
本发明的技术方案有益效果在于:提供一种海洋大数据处理系统,通过对海域上的船舶信息进行融合处理,以有效地筛选识别海洋数据,进而对海域上所有船舶进行实时管控。
附图说明
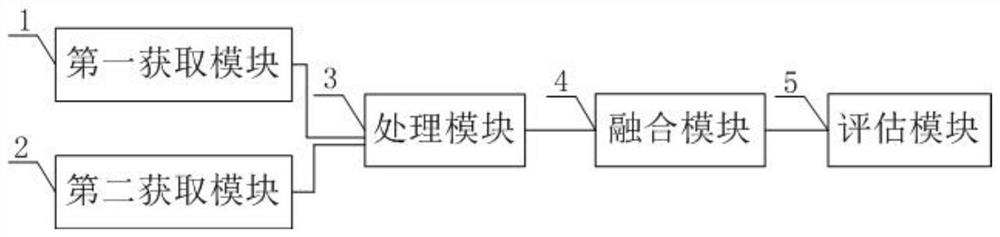
图1为本发明优选实施方式中,海洋大数据处理系统的结构示意图;
图2为本发明优选实施方式中,处理模块的结构示意图;
图3为本发明优选实施方式中,融合模块的结构示意图;
图4为本发明优选实施方式中,优选模块的结构示意图;
图5为本发明优选实施方式中,模糊匹配模块的结构示意图;
图6为本发明一具体实施例中,海洋大数据处理系统的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
本发明提供一海洋大数据处理系统,如图1所示,包括:
一第一获取模块1,用于获取海域上所有船舶的当前运行信息;
一第二获取模块2,用于获取船舶的历史运行信息;
一处理模块3,分别连接第一获取模块1和第二获取模块2,用于根据当前运行信息和历史运行信息对船舶的下一时刻的运行信息进行预测,得到预测运行信息;
一融合模块4,连接处理模块3,用于根据当前运行信息和历史运行信息,对预测运行信息进行融合处理,得到船舶的综合运行状态;
一评估模块5,连接融合模块4,用于根据所有船舶的综合运行状态获取海域的态势评估结果。
具体地,考虑到现有技术中无法对海洋数据进行分析处理,导致无法实现对海域的实时管控,本发明提供一种海洋大数据系统,根据海域上所有船舶的历史运行信息以及实时获取到的当前运行信息对下一时刻的运行信息进行预测,进而获取海域的态势评估结果,以实现对海域的实时管控和提前预警。
本发明优选的实施方式中,如图2所示,处理模块3包括:
一第一获取单元31,用于根据当前运行信息和历史运行信息,获取船舶的当前位置信息和船舶的历史位置信息;
一位置处理单元32,连接第一获取单元31,用于根据历史位置信息和当前位置信息,对船舶的下一时刻的位置信息进行预测,得到预测位置信息。
本发明优选的实施方式中,位置处理单元采用位置卡曼滤波算法。
具体地,采用位置卡曼滤波算法,根据获取船舶的当前位置信息和船舶的历史位置信息,对船舶的下一时刻的位置信息进行预测,得到预测位置信息。进一步地,于实际运用中,海域上的船舶之间可以进行通信,船舶的运行位置也会收到周围船舶的干扰,比如避障、追踪等,由此,本发明还可以采用待预测的船舶与周围船舶之间的传输的运行信息,根据待预测船舶的当前运行信息和历史运行信息,周围船舶的当前运行信息和历史运行信息,对待预测船舶的下一时刻的位置信息进行预测。再进一步地,运行信息中包括自识别信息、北斗信息和雷达信息,雷达信息通常采用相对坐标、自识别信息常通过GNSS(GlobalNavigation Satellite System,全球卫星导航系统)获取,得到的是绝对坐标,由此,本发明根据当前运行信息获取当前位置信息时,还需要注意不同参考系下的位置信息的转换。
本发明优选的实施方式中,如图2所示,处理模块3包括:
一第二获取单元33,用于根据当前运行信息和历史运行信息,获取船舶的当前特征对应的当前特征信息和船舶的历史特征对应的历史特征信息;
一特征处理单元34,连接第二获取单元33,用于根据历史特征信息和当前特征信息,生成一预测特征以及对应的预测特征信息。
本发明优选的实施方式中,特征处理单元采用无迹卡曼滤波算法。
具体地,采用无迹卡曼滤波算法对当前特征信息和历史特征信息生成新的特征以及对应的特征信息。具体地,特征可以为速度、航向、加速度等。
本发明优选的实施方式中,如图3所示,融合模块4包括:
一时空校准单元41,用于根据所有船舶的当前运行信息和历史运行信息,对所有船舶的预测运行信息进行时空校准处理,得到时空统一后的所有船舶的预测运行信息;
一信息融合单元42,连接时空校准单元41,用于根据时空统一后的所有船舶的预测运行信息判别船舶的功能类别,得到所有船舶的功能类别信息;
一跟踪单元43,连接信息融合单元42,用于根据时空统一的所有船舶的预测运行信息,对所有船舶的运行轨迹进行跟踪处理,得到船舶的运行轨迹信息。
具体地,为了对每个船舶进行具体分析,以及对四周船舶之间的位置关系进行分析,设置融合模块4,通过每个船舶的运行信息,得到每个船舶的综合运行状态。需要说明的是,通常意义上的数据融合需要根据先验信息,然而,对于海域上的船舶数据,在实践中很难获得精确的先验信息,因此,此处设置融合模块4,采用ER算法,进行不同时刻的信息融合、不同船舶之间的信息融合,以处理某些不确定的推理,以及从不完整的信息中得出符合常规逻辑的结果,相应地,先验信息仅需要一些更为直观和容易获得的信息,如海域的位置信息、不同类型的船舶于航行过程中的经验数据,以及每个船舶的历史数据。
本发明优选的实施方式中,当前运行信息中包括:船舶的北斗信息;和/或自识别信息;和/或雷达信息。
本发明优选的实施方式中,如图4所示,还包括一优选模块6,设置在处理模块3和融合模块4之间,用于调整当前运行信息。
处理模块3,用于根据历史运行信息和调整后的当前运行信息对船舶的下一时刻的运行信息进行预测,得到预测运行信息。
具体地,考虑到自识别信息中的位置信息是相对位置信息、北斗信息中的位置信息是绝对信息,不同的信息具有不同的准确程度,在充分利用所有信息的同时,兼顾不同信息的差异性、准确性,可以采用优选模块6,调整当前运行信息。例如,在获取预测位置信息时,针对当前的北斗信息、当前的自识别信息、当前的雷达信息、历史的北斗信息、历史的自识别信息、历史的雷达信息设置不同的权重,以获得准确的预测位置信息。
本发明优选的实施方式中,如图5所示,还包括一模糊匹配模块7,分别连接融合模块4、第一获取模块1和第二获取模块2,用于根据船舶的综合运行状态对船舶的当前运行信息、船舶的历史运行信息进行模糊匹配,调整船舶以及综合运行状态之间的匹配关系。
进一步地,于本发明一具体实施例中,如图6所示,提供一种海洋大数据处理系统,可以通过对海域上的船舶信息进行融合处理,以有效地筛选识别海洋数据,进而对海域上所有船舶进行实时管控。
以上仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
- 一种海洋大数据处理系统
- 一种大数据处理系统及大数据处理方法