一种基于动态称重的路面分车方法
文献发布时间:2023-06-19 11:08:20
技术领域
本发明涉及车辆称重检测技术领域,具体涉及一种基于动态称重的路面分车方法。
背景技术
收费站计重收费系统大概分为几个部分:称体部分,过往车辆压过称体,传感器感受到压力将数据发送;轮轴识别部分,对过往车辆的轴型,车型进行判别,并将数据发送;车辆分离部分,一般采用红外线发射接收装置把连续通过的车辆进行分离,同样把分离的数据发送;数据采集处理部分,前三部分的数据统一汇总到数据采集处理器,进行数据统一处理,得到每一个车辆的车型,轴型,车重,限载率,甚至车辆每一个轴的重量。
在动态称重系统中路面上,对于车辆区分,大部分的动态称重系统会采用其他的激光或者线圈地感方式进行对车辆进行收尾。但实际的情况是,激光和线圈地感都有他不足的特点,首先激光会容易受到影响。太阳光的干扰以及灰尘的干扰,降低灵敏度。而地感更会受到地面的开裂和沉降的影响,导致很快的损坏。在单独使用传感器的情况下,对车辆进行有效的分车收尾成为动态称重很关键的一个技术特点。
发明内容
本发明提供了一种基于动态称重的路面分车方法,解决了以上所述的收费站的动态称重成本高且技术方案复杂的技术问题。
本发明为解决上述技术问题提供了一种基于动态称重的路面分车方法,包括:
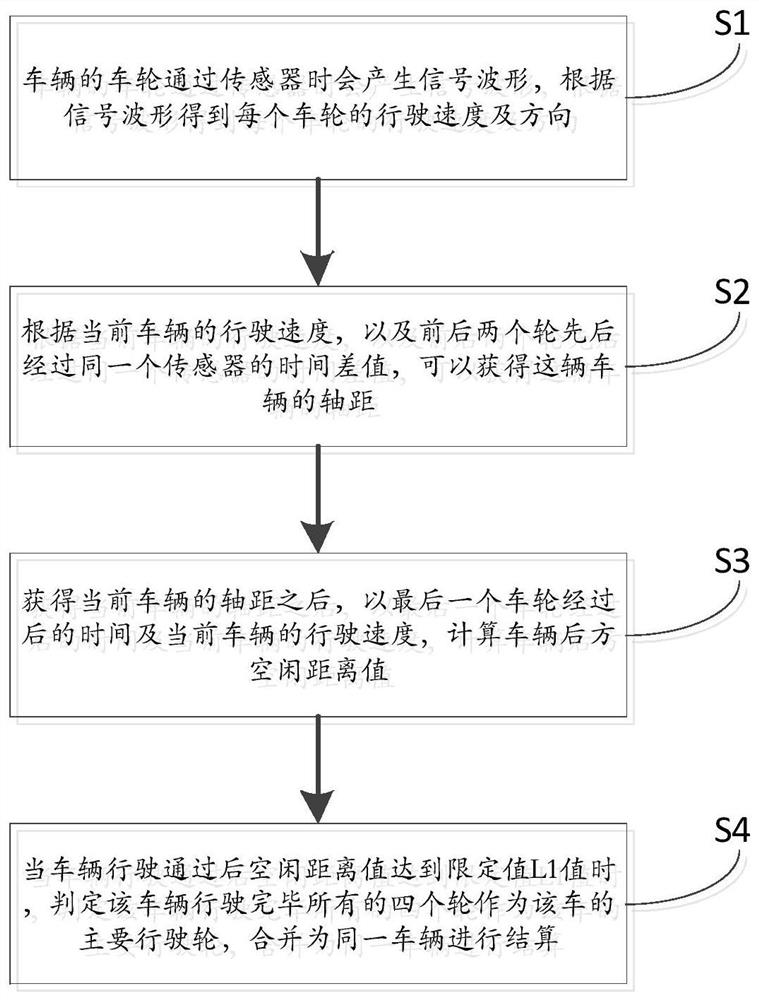
S1,车辆的车轮通过传感器时会产生信号波形,根据信号波形得到每个车轮的行驶速度及方向;
S2,根据当前车辆的行驶速度,以及前后两个轮先后经过同一个传感器的时间差值,可以获得这辆车辆的轴距;
S3,获得当前车辆的轴距之后,以最后一个车轮经过后的时间及当前车辆的行驶速度,计算车辆后方空闲距离值;
S4,当车辆行驶通过后空闲距离值达到限定值L1值时,判定该车辆行驶完毕所有的四个轮作为该车的主要行驶轮,合并为同一车辆进行结算。
优选地,所述S1具体包括:所述传感器为称重传感器,当车轮压过称重传感器上时会形成称重波形,所述称重波形即为信号波形。
优选地,通过积分的方式对称重波形进行实时面积计算,具体地,以发生突变之时为起始时刻,计算之后每一个时刻的波形距离所述起始时刻的积分面积。
优选地,获取多个积分面积以及积分面积与对应时间段的比值,将所有比值进行正态分布,剔除其中远离正态分布曲线的比值点,根据波形面积以及时间持续宽度值,剔除异常的干扰波形。
优选地,剔除干扰波形,根据前后波形进行平缓过渡填补干扰波形段得到一个车轮的完整有效波形,以纠正因突变而产生的积分面积。
优选地,在获得一个完整有效波形后,根据该完整有效波形的上升和下降的幅度作为判断值,该上升和下降即为车轮进入和离开传感器的时间信息,设定这段时间宽度为B。
优选地,以完整有效波形的上升和下降的时间宽度B的中间时间点作为有效波形真正的原始中心,并在该中间时间点对该车轮进行时间标记,作为后续判断的必要条件。
优选地,当完整有效波形的原始中心点的左、右时间和左、右面积都满足要求时,则确定该车轮为一个真正的车轮信息;
具体地,原始中心左边对应突变时刻的积分面积与对应时间段的比值大于预设阈值,且原始中心右边对应突变时刻的积分面积与对应时间段的比值大于预设阈值时,则该有效波形为车轮信息。
优选地,所述S4之后还包括:当检测到轴距小于连轴限定长度时,且前车中每个轮的后方空闲距离值在限定值L1以上时,自动判断为该车辆为一个连轴货车,同时在限定值L1值的基础上再增加后方空闲距离值L2为最大轴距值进行判断,最终当检测到车轮后方空闲距离值达到总限定值(L1+L2)时,则判定合并为一辆车辆进行结算。
有益效果:本发明提供了一种基于动态称重的路面分车方法,包括S1,车辆的车轮通过传感器时会产生信号波形,根据信号波形得到每个车轮的行驶速度及方向;S2,根据当前车辆的行驶速度,以及前后两个轮先后经过同一个传感器的时间差值,可以获得这辆车辆的轴距;S3,获得当前车辆的轴距之后,以最后一个车轮经过后的时间及当前车辆的行驶速度,计算车辆后方空闲距离值;S4,当车辆行驶通过后空闲距离值达到限定值L1值时,判定该车辆行驶完毕所有的四个轮作为该车的主要行驶轮,合并为同一车辆进行结算。该方案只有称重传感器作为信号收集终端,无需增加其他传感的方式情况下实现对车辆的有效分离和解析,成本低廉,结构简单易实施,且精度高,便于推广实施应用,无需修改现有动态称重系统,节约了成本,提高了效率。
上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。本发明的具体实施方式由以下实施例及其附图详细给出。
附图说明
此处所说明的附图用来提供对本发明的进一步理解,构成本申请的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
图1为本发明基于动态称重的路面分车方法的流程示意图。
具体实施方式
以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。在下列段落中参照附图以举例方式更具体地描述本发明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
如图1所示,本发明提供了一种基于动态称重的路面分车方法,包括:S1,两轴车辆的车轮通过传感器时会产生信号波形,根据信号波形得到每个车轮的行驶速度及方向。一般车站称重系统有两个称重传感器以下都简称传感器,前后两排车轮先后通过两个传感器即s1和s2传感器分别会在两轴车辆产生八个波形,两个传感器并排布置,前后两排的两个车轮分别经过两个传感器的时候,可以得到每个车轮行驶的速度以及方向。具体地,当一个车轮经过传感器上时,波形会产生一个上升波,当该车轮离开该传感器时,会形成一个下降波,这样每个车轮压过传感器就会产生两个波形,总共四个轮子就会形成8个波形。其中,每个单个轮子经过传感器上时可以检测出该轮子的前进速度,具体通过波形来进行分析计算便可得到,或者通过试验也可以得到具体一个传感器的上升波与下降波的时间长度便可得知轮子的速度,多次试验便可绘制上升波与下降波的时间长度与轮子的速度所对应的曲线表。如此,便可得知在实际使用过程中,一个轮子经过传感器所产生的波形便可对应得知该轮子的速度。通过前后两个轮子先后经过同一个传感器,便可得知该车辆的行进方向。
S2,根据当前车辆的行驶速度,以及前后两个轮先后经过同一个传感器的时间差值,可以获得这辆车辆的轴距。有了每个车轮的速度,前后两个车轮先后经过同一个传感器的时间差值,便可计算出轴距。
S3,获得当前车辆的轴距之后,以最后一个车轮经过后的时间及当前车辆的行驶速度,计算车辆后方空闲距离值。四个轮子都通过传感器后便可计算出轴距,当前后两排轮子都通过传感器后,开始计时,并按照前面的该车辆的行驶速度,便可得知车辆的大致型号或者分类,是小轿车还是大货车或者多车厢的货车,计算车辆后方空闲距离值。
S4,当车辆行驶通过后空闲距离值达到限定值L1值时,判定该车辆行驶完毕所有的四个轮作为该车的主要行驶轮,合并为同一车辆进行结算。L1值为设定值,如果一个车轮的车轮数量大于4个,则计算车辆后方空闲距离值时会达到限定值L1值,此时便可反过来推算出该车辆为大于四个轮子的大车。系统在称重时,将上述所有满足条件的轮子都算作是同一辆车,如此这样便可达到地面分车的目的。
优选的方案,所述S1具体包括:所述传感器为称重传感器,当车轮压过称重传感器上时会形成称重波形,所述称重波形即为信号波形。
优选的方案,通过积分的方式对轮重波形进行实时面积计算,具体地,以发生突变之时为起始时刻,计算之后每一个时刻的波形距离所述起始时刻的积分面积。
优选的方案,获取多个积分面积以及积分面积与对应时间段的比值,将所有比值进行正态分布,剔除其中远离正态分布曲线的比值点,根据波形面积以及时间持续宽度值,剔除异常的干扰波形。用积分面积与时间段的比值作为参考值,可以有效的说明该波形段是否是干扰波形。正常的突变是突变的脉冲高度较高,即积分面积较大。而干扰波形的积分面积较小,可以对所有比值或者积分面积进行正太分布,远离正太分布曲线的则是干扰波形。如此便可对比分析筛选出干扰波形。或者通过设定阈值,当比值小于阈值时则判定为干扰波形。
优选的方案,剔除干扰波形,根据前后波形进行平缓过渡填补干扰波形段得到一个车轮的完整有效波形,以纠正因突变而产生的积分面积。可以采用二项式拟合方法或者直线差值方式将该剔除的部分进行弥补桥接。
优选的方案,在获得一个完整有效波形后,根据该完整有效波形的上升和下降的幅度作为判断值,该上升和下降即为车轮进入和离开传感器的时间信息,设定这段时间宽度为B。该时间宽度B即表示车轮压在传感器上的总共时间长度。
优选的方案,以完整有效波形的上升和下降的时间宽度B的中间时间点作为有效波形真正的原始中心,并在该中间时间点对该车轮进行时间标记,作为后续判断的必要条件。选在波形上升和下降的中间时间点,可以最大程度消除干扰影响以及传感器本身的精度影响,若选择其他点都有可能不是有效点。
优选的方案,当完整有效波形的原始中心点的左、右时间和左、右面积都满足要求时,则确定该车轮为一个真正的车轮信息;
具体地,原始中心左边对应突变时刻的积分面积与对应时间段的比值大于预设阈值,且原始中心右边对应突变时刻的积分面积与对应时间段的比值大于预设阈值时,则该有效波形为车轮信息。对每一个波形都要进行分析,通过找中心时间点,然后对该波的中心时间点的两边都进行积分计算和对比分析,反过来再验证该波形是不是干扰波,起到了进一步地筛选剔除的作用。
优选的方案,所述S4之后还包括:当检测到轴距小于连轴限定长度时,且前车中每个轮的后方空闲距离值在限定值L1以上时,自动判断为该车辆为一个连轴货车,同时在限定值L1值的基础上再增加后方空闲距离值L2为最大轴距值进行判断,最终当检测到车轮后方空闲距离值达到总限定值(L1+L2)时,则判定合并为一辆车辆进行结算,此时该车辆为大货车,有拖箱。否则不是一个车辆,进行相应的车辆波形信息分离即可。
有益效果:本发明提供了一种基于动态称重的路面分车方法,包括S1,车辆的车轮通过传感器时会产生信号波形,根据信号波形得到每个车轮的行驶速度及方向;S2,根据当前车辆的行驶速度,以及前后两个轮先后经过同一个传感器的时间差值,可以获得这辆车辆的轴距;S3,获得当前车辆的轴距之后,以最后一个车轮经过后的时间及当前车辆的行驶速度,计算车辆后方空闲距离值;S4,当车辆行驶通过后空闲距离值达到限定值L1值时,判定该车辆行驶完毕所有的四个轮作为该车的主要行驶轮,合并为同一车辆进行结算。该方案只有称重传感器作为信号收集终端,无需增加其他传感的方式情况下实现对车辆的有效分离和解析,成本低廉,结构简单易实施,且精度高,便于推广实施应用,无需修改现有动态称重系统,节约了成本,提高了效率。
以上所述,仅为本发明的较佳实施例而已,并非对本发明作任何形式上的限制;凡本行业的普通技术人员均可按说明书附图所示和以上所述而顺畅地实施本发明;但是,凡熟悉本专业的技术人员在不脱离本发明技术方案范围内,利用以上所揭示的技术内容而做出的些许更动、修饰与演变的等同变化,均为本发明的等效实施例;同时,凡依据本发明的实质技术对以上实施例所作的任何等同变化的更动、修饰与演变等,均仍属于本发明的技术方案的保护范围之内。
- 一种基于动态称重的路面分车方法
- 一种基于长标距光纤光栅传感技术的桥梁动态称重方法及动态称重系统