一种适应有人和无人驾驶双模式的赛车转向机构
文献发布时间:2023-06-19 11:09:54
技术领域
本发明属于涉及一种赛车转向机构,尤其是指一种适应有人和无人驾驶双模式的赛车转向机构。
背景技术
为了响应中国汽车行业的发展需求,由中国汽车工程学会承办的中国大学生无人驾驶方程式大赛(FSAC)鼓励高校学子研究无人驾驶技术,在原有电动赛车的基础上添加感知设备和控制装置,实现赛车自主驾驶。其中,赛车转向系统的线控化改进是极其重要的关键技术。
FSAC大赛规则要求无人驾驶赛车必须具备有人驾驶和无人驾驶两种转向模式,并能实现安全、便捷的模式转换以完成赛事不同的比赛项目。专利号“CN208069787U”公开了一种无人驾驶电动赛车线控化转向系统及其控制方法,该专利采用的赛车转向机构采用第一转向器齿条总成和第二转向器齿条总成,两个总成分开布置,且第一齿条与第二齿条之间由圆键连接;在无人驾驶时由电机驱动第一转向器带动第一齿条,再由第一齿条通过圆键驱动第二齿条总成,输出转向动作。在有人驾驶时,通过方向盘直接驱动第二转向器和第二齿条总成,进而完成转向动作。但是此转向机构的结构复杂,占用空间大,布置难度大,并且机构传动的时滞性较长,在有人驾驶时方向盘会带动第一齿条而使电机反转,增加转向阻力,转向费力而导致人工驾驶的转向安全性低。
发明内容
本发明的目的在于针对上述问题,提供一种结构简单、转向阻力小、切换灵活和传动平稳的适应有人和无人驾驶双模式的赛车转向机构。本结构在切换驾驶模式时无需采用动力分离装置,简化了转向机构,减小了占用的空间,有利于赛车的轻量化设计。
本发明的目的可采用以下技术方案来达到:
一种适应有人和无人驾驶双模式的赛车转向机构,包括方向盘、第一转轴、第二转轴、太阳轮、行星齿轮、蜗轮、蜗杆、电机、行星架、第三转轴、第四转轴、输出齿轮和转向横拉杆;所述方向盘的中心与第一转轴的一端固定连接,第一转轴的另一端通过转向万向节与第二转轴的一端固定连接,第二转轴的另一端与太阳轮的中心固定连接;所述蜗轮内壁设有轮齿,所述行星齿轮设为多个且与轮齿啮合,所述太阳轮与多个行星齿轮同时啮合;所述行星架的一端与行星齿轮固定连接,行星架的另一端与第三转轴的一端固定连接,第三转轴的另一端通过转向万向节与第四转轴的一端固定连接,第四转轴的另一端与输出齿轮的中心固定连接,输出齿轮与转向横拉杆上的齿条啮合;所述电机的输出轴与蜗杆固定连接,蜗杆与蜗轮传动连接;所述蜗杆的螺旋角小于齿轮间的当量摩擦角。在人工驾驶时,方向盘依次通过第一转轴、转向万向节、第二转轴、太阳轮、行星齿轮、行星架、第三转轴、转向万向节、第四转轴、输出齿轮驱动转向横拉杆滑动;在自动驾驶时,通过电机控制蜗杆的转向和转速而依次驱动蜗杆、蜗轮、行星齿轮、行星架、第三转轴、转向万向节、第四转轴、输出齿轮驱动转向横拉杆滑动。
作为一种优选的方案,多个所述行星齿轮均匀分布于蜗轮内壁的轮齿上,所述太阳轮的中心轴线与蜗轮的中心轴线重合。
作为一种优选的方案,所述电机与控制器的输出端连接,通过控制器控制电机的工作状态。
作为一种优选的方案,所述行星齿轮设为三个,相邻两个行星齿轮之间的夹角为120度。
作为一种优选的方案,所述电机为步进电机或伺服电机。
作为一种优选的方案,所述控制器为ECU。
实施本发明,具有如下有益效果:
本发明人工驾驶时,方向盘依次通过第一转轴、转向万向节、第二转轴、太阳轮、行星齿轮、行星架、第三转轴、转向万向节、第四转轴、输出齿轮驱动转向横拉杆滑动;在自动驾驶时,通过电机控制蜗杆的转向和转速而依次驱动蜗杆、蜗轮、行星齿轮、行星架、第三转轴、转向万向节、第四转轴、输出齿轮驱动转向横拉杆滑动。本结构通过蜗轮内壁的轮齿与行星齿轮相啮合,使蜗轮蜗杆与行星齿轮机构的巧妙连接在一起。在工作时,利用蜗轮蜗杆机构的自锁性,实现赛车人工转向与自主转向的灵活切换,使得在人工驾驶时转向的阻力更小,更加省力。在切换驾驶模式时,本发明无需采用动力分离装置,简化了转向机构,减小了占用的空间,有利于赛车的轻量化设计。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
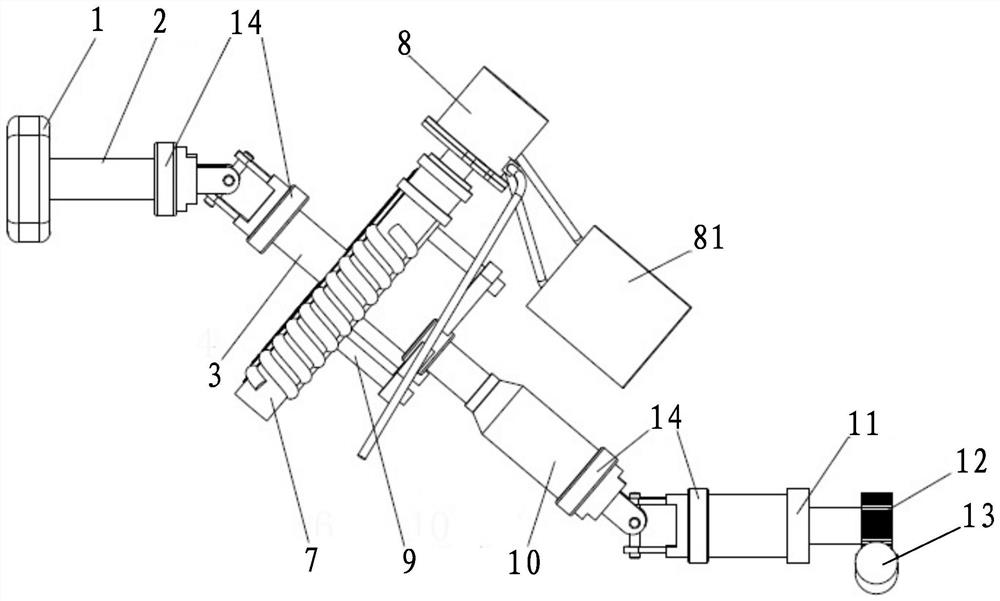
图1是本发明适应有人和无人驾驶双模式的赛车转向机构的结构示意图。
图2是图1的左视图。
图3是图1的俯视图。
图4是图1的立体图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例
参照图1至图4,本实施例涉及适应有人和无人驾驶双模式的赛车转向机构,包括方向盘1、第一转轴2、第二转轴3、太阳轮4、行星齿轮5、蜗轮6、蜗杆7、电机8、行星架9、第三转轴10、第四转轴11、输出齿轮12和转向横拉杆13;所述方向盘1的中心与第一转轴2的一端固定连接,第一转轴2的另一端通过转向万向节14与第二转轴3的一端固定连接,第二转轴3的另一端与太阳轮4的中心固定连接;所述蜗轮6内壁设有轮齿61,所述行星齿轮5设为多个且与轮齿61啮合,所述太阳轮4与多个行星齿轮5同时啮合;所述行星架9的一端与行星齿轮5固定连接,行星架9的另一端与第三转轴10的一端固定连接,第三转轴10的另一端通过转向万向节14与第四转轴11的一端固定连接,第四转轴11的另一端与输出齿轮12的中心固定连接,输出齿轮12与转向横拉杆13上的齿条10啮合;所述电机8的输出轴与蜗杆7固定连接,蜗杆7与蜗轮6传动连接;所述蜗杆7的螺旋角小于齿轮间的当量摩擦角,即蜗杆7可以驱动蜗轮6转动,而蜗轮6无法带动蜗杆7转动,也就是说在电机8不工作,蜗杆7不转动时,蜗轮6被施加固定约束而处于锁紧的状态。此时可通过方向盘1带动太阳轮4,从而驱动行星齿轮和行星架9转动向下输出转向动作。在自动驾驶模式时,启动电机8工作,通过电机8控制蜗杆7的旋转方向和速度,从而驱动蜗轮6和行星齿轮5转动,进而驱动行星架9转动向下输出转向动作。
具体的,在人工驾驶时,方向盘1依次通过第一转轴2、转向万向节14、第二转轴3、太阳轮4、行星齿轮5、行星架9、第三转轴10、转向万向节14、第四转轴11、输出齿轮12驱动转向横拉杆13滑动;在自动驾驶时,通过电机8控制蜗杆7的转向和转速而依次驱动蜗杆7、蜗轮6、行星齿轮5、行星架9、第三转轴10、转向万向节14、第四转轴11、输出齿轮12驱动转向横拉杆13滑动。本结构通过蜗轮内壁的轮齿61与行星齿轮5相啮合,使蜗轮蜗杆7与行星齿轮5机构的巧妙连接在一起。在工作时,利用蜗轮蜗杆机构的自锁性,实现赛车人工转向与自主转向的灵活切换,使得在人工驾驶时转向的阻力更小,更加省力。在切换驾驶模式时,本发明无需采用动力分离装置,简化了转向机构,减小了占用的空间,有利于赛车的轻量化设计。
所述电机8与控制器的输出端连接,通过控制器控制电机8的工作状态。具体的,电机8通过驱动器81与控制器的输出端连接。
多个所述行星齿轮5均匀分布于蜗轮6内壁的轮齿61上,所述太阳轮4的中心轴线与蜗轮6的中心轴线重合。所述行星齿轮5设为三个,相邻两个行星齿轮5之间的夹角为120度。当然,根据需要行星齿轮5也可以设为四个甚至更多。
所述电机8为步进电机或伺服电机。所述控制器为ECU。无人驾驶方程式赛车上设有转向模式切换按钮,按钮设计在方向盘1右侧的控制面板上,方便车手直接操作。驾驶员按下转向切换按钮,键控系统会模拟一个电压信号传到车辆控制单元ECU,由ECU进行决策并输出切换指令。人工驾驶模式下,ECU控制电机8断电,实现蜗杆7与蜗轮之间的自锁。驾驶员通过方向盘1驱动太阳轮4和行星齿轮输出转向动作。通过按钮切换至无人驾驶模式时,由ECU启动电机8,并由ECU对电机8进行实时控制,电机8直接控制赛车的转向动作,完成赛车的自主驾驶。
工作原理:
无人驾驶模式下,ECU控制电机8启动工作而驱动蜗杆7旋转,使蜗杆7带动蜗轮转动。蜗轮通过其内轮齿61与三个行星齿轮5相啮合传递动力,使三个行星齿轮5沿着蜗轮内壁旋转,进而驱动行星架9旋转。行星架9带动第三转轴10旋转,使第三转轴10通过转向万向节14带动第四转轴11旋转,最终实现输出齿轮12驱动转向横拉杆13上的齿条滑动而把方向盘1的旋转运动转化为转向横拉杆13的左、右平移运动,实现自主转向。
有人驾驶时模式下,ECU控制电机8停止工作。由于蜗轮蜗杆机构的自锁性,即蜗杆7能带动蜗轮,但蜗轮不能驱动蜗杆7。此方向盘1输出的动力通过第一转轴2和转向万向节14和第二转轴3使得太阳轮4作正向或反向旋转运动,进而带动行星齿轮5和行星架9旋转。行星架9带动第三转轴10旋转,使第三转轴10通过转向万向节14带动第四转轴11旋转,最终实现输出齿轮12驱动转向横拉杆13上的齿条滑动而把方向盘1的旋转运动转化为转向横拉杆13的左、右平移运动,实现人工转向。
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
- 一种适应有人和无人驾驶双模式的赛车转向机构
- 一种适应有人和无人驾驶双模式的赛车转向机构