一种双工器的螺栓调节装置
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及机械工具技术领域,特别涉及一种双工器的螺栓调节装置。
背景技术
双工器是一种由两组不同频率的带通滤波器组成的,用于将发射和接收讯号隔离,保证接收和发射都能同时正常工作的异频双工电台。
双工器的表面有很多螺栓,螺栓下部为谐振腔,通过调节螺栓旋入腔体的旋入量,可以改变谐振腔的谐振频率,从而改变输出波形。在实际双工器生产过程中,调节螺栓旋入腔体的旋入量是由人工调节,以达到生产规定的波形。
由于露出在双工器表面的螺栓体积太小,无法实现直接测量螺栓旋入腔体的旋入量。
发明内容
本发明提供一种双工器的螺栓调节装置,解决了或部分解决了现有技术中露出在双工器表面的螺栓体积太小,无法实现直接测量螺栓旋入腔体的旋入量的技术问题。
为解决上述技术问题,本发明提供了一种双工器的螺栓调节装置包括:定位平台、支撑架、距离传感器、受光平面及螺丝刀;所述支撑架可滑动式地设置在所述定位平台上,所述支撑架可在所述定位平台上沿第一方向动作;所述受光平面固定设置在所述螺丝刀的顶部;所述距离传感器的固定端可滑动式地设置在所述支撑架上,所述距离传感器可在所述支撑架上沿第二方向动作,所述第一方向与所述第二方向垂直,所述距离传感器的发射端对准所述受光平面。
进一步地,所述定位平台包括:两个支撑块;两个所述支撑块之间有间距,所述双工器设置在两个所述支撑块之间;所述支撑架的两端分别可滑动式地设置两个所述支撑块上。
进一步地,所述支撑架包括:横梁及两个支撑板;两个所述支撑板与两个所述支撑块一一对应,所述支撑板的底部可滑动式地设置在相对应的所述支撑块上;所述横梁的两端分别与两个所述支撑板的顶部固定连接。
进一步地,两个所述支撑块上均开设有两个第一滑轨;两个所述支撑板的底部均设置有两个第一滑块,两个所述第一滑块与两个所述第一滑轨一一对应,所述第一滑块可滑动式地设置在相对应的第一滑轨内。
进一步地,所述距离传感器的固定端可通过滑座设置在所述横梁侧部;所述横梁的侧部开设有若干第二滑轨,所述滑座朝向横梁的端面上固定设置有若干第二滑块,若干所述第二滑块与若干所述第二滑轨一一对应,所述第二滑块可滑动式地设置在相对应的第二滑轨内。
进一步地,所述滑座通过两个限位件设置在所述横梁上;两个限位件之间的间距与所述横梁的宽度相匹配;两个所述限位件均包括:第一限位板及第二限位板;所述第一限位板的第一端与所述滑座朝向所述横梁的端面垂直固定连接,所述第一限位板的第二端与所述第二限位板垂直固定连接;所述第一限位板的长度与所述横梁的厚度相匹配。
进一步地,所述螺丝刀包括:螺杆及套筒;所述螺杆的第一端与所述受光平面固定连接,所述螺杆的第二端设置有刀头,所述螺栓的螺栓头上开设有嵌槽,所述刀头的形状与所述嵌槽的形状相匹配;所述套筒与所述螺杆的螺纹部螺纹连接,所述套筒可插拔式地设置在所述螺栓的螺帽上。
进一步地,所述螺杆上可拆卸式地设置有手柄。
基于相同的发明构思,本申请还提供一种双工器的螺栓调节方法,包括以下步骤:将双工器放置在定位平台的两个支撑块之间;将螺丝刀拿到需调节的螺栓上方,并将螺栓的螺帽嵌入螺丝刀的套筒内;将螺丝刀的丝杠在套筒内转动,使螺丝刀的刀头嵌入螺栓的螺栓头的嵌槽内;支撑架在两个支撑块上沿第一方向动作,距离传感器在支撑架上沿第二方向动作,使距离传感器到达螺丝刀的上方;距离传感器的发射端对准受光平面,并获得第一距离信号;操作螺丝刀,使刀头通过螺栓头带动螺栓转动,此时,距离传感器获得第二距离信号;距离传感器将第一距离信号及第二距离信号发生给控制器,控制器根据第一距离信号及第二距离信号,获得螺栓的旋入度。
进一步地,当刀头带动螺栓转动,螺栓到位且螺栓旋入度测量完毕时,将套筒拿出螺帽,将螺帽锁紧。
本申请实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
由于支撑架可滑动式地设置在定位平台上,支撑架可在定位平台上沿第一方向动作,受光平面固定设置在螺丝刀的顶部,距离传感器的固定端可滑动式地设置在支撑架上,距离传感器可在支撑架上沿第二方向动作,第一方向与第二方向垂直,距离传感器的发射端对准受光平面,所以,将双工器放置在定位平台上,将螺丝刀拿到需调节的螺栓上方,并使螺丝刀与螺栓的螺栓头接触,支撑架在定位平台上沿第一方向动作,距离传感器在支撑架上沿第二方向动作,使距离传感器到达螺丝刀的上方,距离传感器的发射端对准受光平面,并获得第一距离信号,操作螺丝刀,螺丝刀通过螺栓头带动螺栓转动,此时,距离传感器获得第二距离信号,距离传感器将第一距离信号及第二距离信号发生给控制器,控制器根据第一距离信号及第二距离信号,获得螺栓的旋入度,可以实现螺栓的旋入量的测量,获得所需的输出波形,简单方便,节约测量时间,提高工作效率。
附图说明
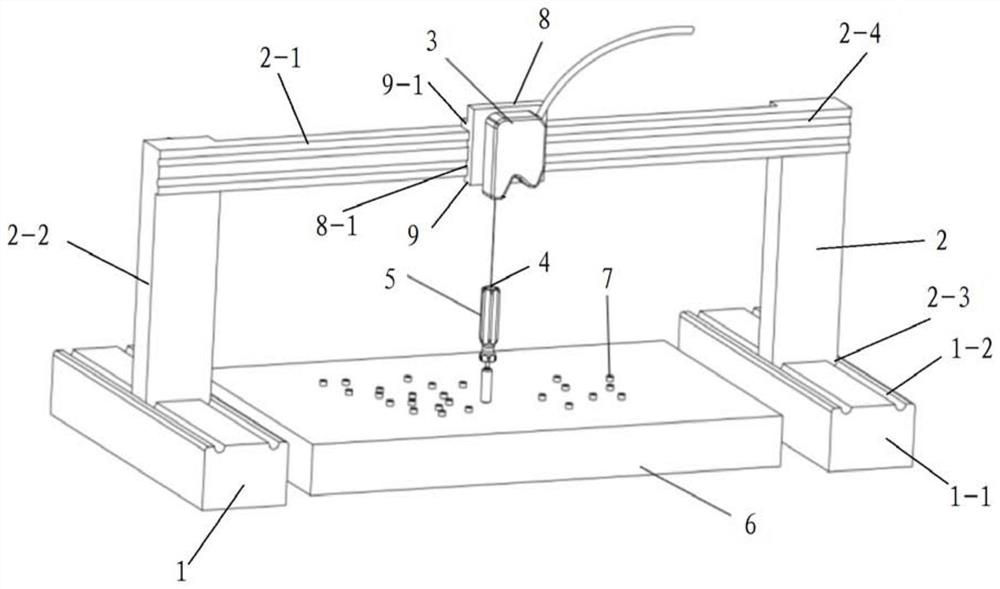
图1为本发明实施例提供的双工器的螺栓调节装置的结构示意图;
图2为图1中双工器的螺栓调节装置的螺丝刀的结构示意图;
图3为图2中螺丝刀的杆体的结构示意图;
图4为图2中螺丝刀的套筒的结构示意图;
图5为图2中螺丝刀的手柄的结构示意图。
具体实施方式
参见图1,本发明实施例提供的一种双工器的螺栓调节装置包括:定位平台1、支撑架2、距离传感器3、受光平面4及螺丝刀5。
支撑架2可滑动式地设置在定位平台1上,支撑架2可在定位平台1上沿第一方向动作。
受光平面4固定设置在螺丝刀5的顶部。
距离传感器3的固定端可滑动式地设置在支撑架2上,距离传感器3可在支撑架2上沿第二方向动作,第一方向与第二方向垂直,距离传感器3的发射端对准受光平面4。
本申请具体实施方式由于支撑架2可滑动式地设置在定位平台1上,支撑架2可在定位平台1上沿第一方向动作,受光平面4固定设置在螺丝刀5的顶部,距离传感器3的固定端可滑动式地设置在支撑架2上,距离传感器3可在支撑架2上沿第二方向动作,第一方向与第二方向垂直,距离传感器3的发射端对准受光平面4,所以,将双工器6放置在定位平台1上,将螺丝刀5拿到需调节的螺栓7上方,并使螺丝刀5与螺栓7的螺栓头接触,支撑架2在定位平台1上沿第一方向动作,距离传感器3在支撑架2上沿第二方向动作,使距离传感器3到达螺丝刀5的上方,距离传感器3的发射端对准受光平面4,并获得第一距离信号,操作螺丝刀5,螺丝刀5通过螺栓头带动螺栓7转动,此时,距离传感器3获得第二距离信号,距离传感器3将第一距离信号及第二距离信号发生给控制器,控制器根据第一距离信号及第二距离信号,获得螺栓7的旋入度,可以实现螺栓7的旋入量的测量,获得所需的输出波形,简单方便,节约测量时间,提高工作效率。
在本实施方式中,距离传感器3可以为激光位移传感器。
具体地,定位平台1包括:两个支撑块1-1。
两个支撑块1-1之间有间距,双工器6设置在两个支撑块1-1之间。
支撑架2的两端分别可滑动式地设置两个支撑块1-1上。
具体地,支撑架2包括:横梁2-1及两个支撑板2-2。
两个支撑板2-2与两个支撑块1-1一一对应,支撑板2-2的底部可滑动式地设置在相对应的支撑块1-1上。在本实施方式中,两个支撑块1-1上均开设有两个第一滑轨1-2,两个支撑板2-2的底部均设置有两个第一滑块2-3,两个第一滑块2-3与两个第一滑轨1-2一一对应,第一滑块2-3可滑动式地设置在相对应的第一滑轨1-2内,可以保证支撑板2-2在支撑块1-1上滑动的稳定性。
横梁2-1的两端分别与两个支撑板2-2的顶部固定连接。在本实施方式中,横梁2-1的两端分别可通过螺栓与两个支撑板2-2的顶部固定连接,便于拆装。
距离传感器3的固定端可通过滑座8设置在横梁2-1侧部。
横梁2-1的侧部开设有若干第二滑轨2-4,滑座8朝向横梁2-1的端面上固定设置有若干第二滑块8-1,若干第二滑块8-1与若干第二滑轨2-4一一对应,第二滑块8-1可滑动式地设置在相对应的第二滑轨2-1内,保证距离传感器3在横梁2-1滑动的稳定性。
其中,当距离传感器3需要到达检测位时,支撑板2-2提高第一滑块2-3在第一滑轨1-2上沿第一方向动作,使距离传感器3在Y方向到达所需位置,滑座8通过第二滑块8-1在第二滑轨2-4内滑动,滑座8带动距离传感器3沿第二方向动作,使距离传感器3在X方向到达所需位置,即可使距离传感器3到达工作位。
具体地,滑座8通过两个限位件9设置在横梁2-1上。
两个限位件9之间的间距与横梁2-1的宽度相匹配。
两个限位件9均包括:第一限位板9-1及第二限位板。
第一限位板9-1的第一端与滑座8朝向横梁2-1的端面垂直固定连接,第一限位板9-1的第二端与第二限位板垂直固定连接。
第一限位板9-1的长度与横梁2-1的厚度相匹配。
当滑座8在横梁2-1上滑动时,第一限位板9-1在横梁2-1上滑动,第二限位板与第一限位板9-1形成L形,两个限位件9之间形成滑动槽,避免滑座8由横梁2-1上掉落。
参见图2,螺丝刀5包括:螺杆5-1及套筒5-2。
螺杆5-1的第一端与受光平面4固定连接,螺杆5-1的第二端设置有刀头5-3,刀头5-3与螺栓7的嵌槽相匹配。
套筒5-2与螺杆5-1的螺纹部螺纹连接,套筒5-2可插拔式地设置在螺栓7的螺帽上。
参见图3,螺杆5-1包括:杆体5-11及丝杠5-12。
杆体5-11的第一端与受光平面4固定连接。
杆体5-11的第二端与丝杠5-12的第一端固定连接,丝杠5-12的第二端设置刀头5-3。
套筒5-2与丝杠5-12螺纹连接。在本实施方式中,套筒5-2为透明材质制成,如透明玻璃,透明塑料等,便于观察刀头5-3的位置。
将丝杠5-12拿到需调节的螺栓7的上方,并将螺栓7的螺帽嵌入螺丝刀的套筒5-2内,螺帽松套在螺栓7上,通过套筒5-2防止螺栓7转动。丝杠5-12在套筒5-2内转动,使刀头5-3嵌入螺栓7的螺栓头的嵌槽内。操作杆体5-11,杆体5-11通过丝杠5-12带动刀头5-3动作,使刀头5-3通过螺栓头带动螺栓7转动
参见图5,螺杆5-1的杆体5-11上可拆卸式地设置有手柄10。在本实施方式中,手柄10的中部开设有通孔,杆体5-11穿过通孔,手柄的长度与杆体5-11的长度相匹配,通过在丝杠5-12上旋转螺母,将手柄10紧固在杆体5-11上,便于拆装。手柄10背离丝杠5-12的端面开设有凹槽,受光平面4嵌入凹槽内,受光平面4与手柄10的端面平齐,保证距离传感器3获得的数据精确。操作人员通过握持手柄10带动杆体5-11转动,便于操作。
参见图4,套筒5-2内开设有嵌入槽5-21,嵌入槽5-21的形状与螺栓7的螺帽的形状相匹配。
在本实施方式中,当螺栓7的螺帽的形状为六边形时,嵌入槽5-21为六角体嵌入槽,当螺栓7的螺帽的形状为八边形时,嵌入槽5-21为八角体嵌入槽。
基于相同的发明构思,本申请还提供一种双工器的螺栓调节方法包括以下步骤:
将双工器6放置在定位平台1的两个支撑块1-1之间。
将螺丝刀5拿到需调节的螺栓7上方,并将螺栓7的螺帽嵌入螺丝刀5的套筒5-2内。
将螺丝刀5的丝杠5-12在套筒5-2内转动,使螺丝刀5的刀头5-3嵌入螺栓7的螺栓头的嵌槽内。
支撑架2在两个支撑块1-1上沿第一方向动作,距离传感器3在支撑架2上沿第二方向动作,使距离传感器3到达螺丝刀5的上方。
距离传感器3的发射端对准受光平面4,并获得第一距离信号。
操作螺丝刀5,使刀头5-3通过螺栓头带动螺栓7转动,此时,距离传感器3获得第二距离信号。
距离传感器3将第一距离信号及第二距离信号发生给控制器,控制器根据第一距离信号及第二距离信号,获得螺栓7的旋入度。
当刀头5-3带动螺栓7转动,螺栓7到位且螺栓旋入度测量完毕时,将套筒5-2拿出螺栓7的螺帽,将螺帽锁紧,保证螺栓到位。
最后所应说明的是,以上具体实施方式仅用以说明本发明的技术方案而非限制,尽管参照实例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种双工器的螺栓调节装置
- 一种水平调节装置及光伏发电基础地螺栓浇筑固定系统