一种智能煤仓清仓机器人
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及煤矿开采领域,具体涉及一种智能煤仓清仓机器人。
背景技术
井下煤仓是在煤矿井下的原煤储存装置,在煤矿井下开采过程中,不断有新的原煤加入井下煤仓,同时仓内原煤通过放煤口流出到皮带运输机上。井下煤仓经过长期使用,在煤仓壁面上便会凝结一定量的原煤凝结物,这些凝结物的存在,一方面导致煤流的阻滞,另一方面大大减少了井下煤仓的储存量。而且这些凝结物的存在有很大的安全隐患。
目前国内大多数煤仓清仓还是人工清仓,需要施工人员入仓,具有施工工序繁琐、效率低、危险系数高且花费工时多。近几年,随着科技的发展,出现了矿用煤仓清仓机器人。这种机器人的出现很大程度上解决了人工清仓的不足。同时也存在很多不足之处,比如,这种机器人大多结构复杂,价格昂贵,故障率高,而且大多只能用于小尺寸煤仓。
发明内容
针对上述存在的技术不足,本发明的目的是提供一种智能煤仓清仓机器人,其能够适用不同尺寸煤仓清仓工艺要求,有效解决现有技术中人工和设备清仓的不足。
为解决上述技术问题,本发明采用如下技术方案:
本发明提供一种智能煤仓清仓机器人,包括固定在台板上的环形圈梁,所述环形圈梁上设有能够沿其行走的移动小车,所述移动小车上固定有用于控制矩形框升降的升降装置,所述矩形框由上横梁、下横梁以及左右两个竖型导轨梁组成,所述矩形框的框内设有能够上下移动的清仓机器人,所述清仓机器人的两端分别与两个竖型导轨梁滑动连接,所述清仓机器人上端固定有曳引机,所述上横梁上固定有两个定滑轮,所述曳引机上分出两股钢丝绳分别穿过两个定滑轮后固定在清仓机器人两端。
优选地,所述升降装置包括万向轴,所述万向轴的两端固定有两个升降卷筒,所述升降卷筒的两侧设有两个与万向轴转动连接的吊板,所述吊杆上端固定在移动小车上,所述移动小车上固定有用于控制其中一个升降卷筒转动的升降驱动电机,所述升降卷筒上固定缠绕有钢丝绳,所述钢丝绳另一端固定在矩形框的上横梁两端。
优选地,所述清仓机器人包括动力站,所述动力站两端分别通过若干支杆固定连接两个套筒,所述套筒嵌套在竖型导轨梁与其滑动连接,所述动力站下方还设有用于清理仓壁的清扫装置。
优选地,所述清扫装置包括中部固定有清扫器的转轴,所述转轴两端分别固定有转轮,所述转轴两端还转动连接有第二吊板,所述第二吊板上端固定在动力站上,所述动力站上固定有第二驱动电机,所述第二驱动电机与其中一个转轴链传动连接。
优选地,所述动力站为移动小车、升降驱动电机、曳引机以及第二驱动电机提供动力。
优选地,所述竖型导轨梁下端连接有短梁。
本发明的有益效果在于:本装置内的竖型导轨梁与升降装置之间采用柔性连接,清仓机器人对仓壁的工作力量能够随仓壁粘煤厚度变化,粘煤厚,力量大,粘煤薄,力量小;本装置内的竖型导轨梁能够上下升降,避免清仓壁工作受仓内煤面高度影响;本装置系统配置简单,整体重量小,便于安装,对台板影响小,适用于各种规格的煤仓。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
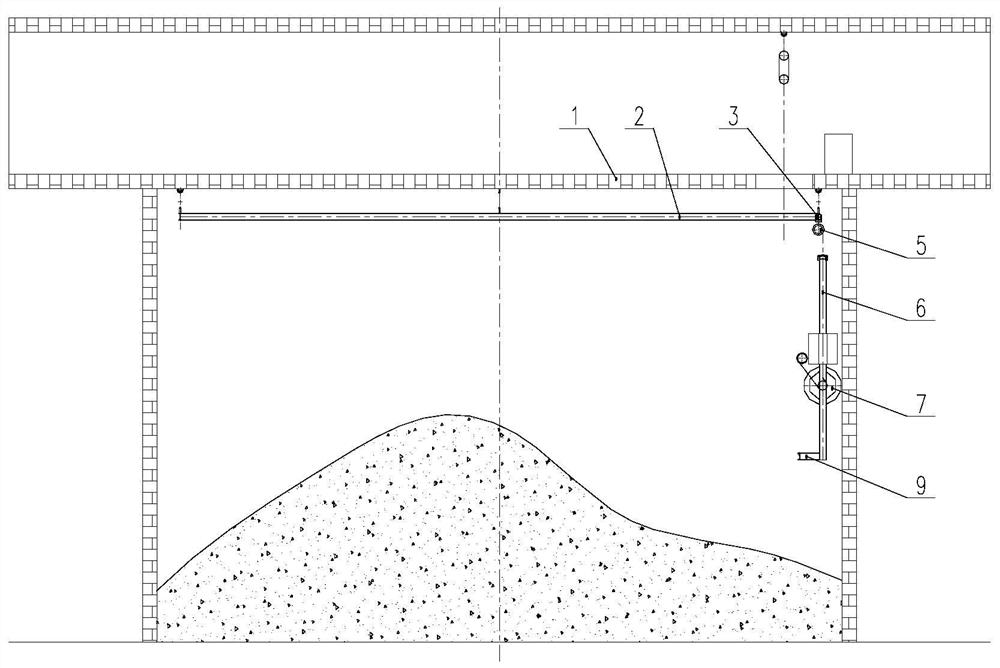
图1为本发明实施例提供的一种智能煤仓清仓机器人的工作位置示意图;
图2为本发明实施例提供的一种智能煤仓清仓机器人的结构示意图。
附图标记说明:
1、台板;2、环形圈梁;3、移动小车;4、定滑轮;5、升降装置;5-1、升降卷筒;5-2、万向轴;5-3、升降驱动电机;6、竖型导轨梁;7、清仓机器人;7-1、曳引机;7-2、动力站;7-3、第二驱动电机;7-4、清扫器;7-5、转轮,8、套筒,9、短梁。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1至图2所示,一种智能煤仓清仓机器人,包括固定在台板1上的环形圈梁2,所述环形圈梁2上设有能够沿其行走的移动小车3,所述移动小车3上固定有用于控制矩形框升降的升降装置5,所述矩形框由上横梁、下横梁以及左右两个竖型导轨梁6组成,所述矩形框的框内设有能够上下移动的清仓机器人7,所述清仓机器人7的两端分别与两个竖型导轨梁6滑动连接,所述清仓机器人7上端固定有曳引机7-1,所述上横梁上固定有两个定滑轮4,所述曳引机7-1上分出两股钢丝绳分别穿过两个定滑轮4后固定在清仓机器人7两端。
所述升降装置5包括万向轴5-2,所述万向轴5-2的两端固定有两个升降卷筒5-1,所述升降卷筒5-1的两侧设有两个与万向轴5-2转动连接的吊板,所述吊杆上端固定在移动小车3上,所述移动小车3上固定有用于控制其中一个升降卷筒5-1转动的升降驱动电机5-3,所述升降卷筒5-1上固定缠绕有钢丝绳,所述钢丝绳另一端固定在矩形框的上横梁两端。
所述清仓机器人7包括动力站7-2,所述动力站7-2两端分别通过若干支杆固定连接两个套筒8,所述套筒8嵌套在竖型导轨梁6与其滑动连接,所述动力站7-2下方还设有用于清理仓壁的清扫装置。
所述清扫装置包括中部固定有清扫器7-4的转轴,所述转轴两端分别固定有转轮7-5,所述转轴两端还转动连接有第二吊板,所述第二吊板上端固定在动力站7-2上,所述动力站7-2上固定有第二驱动电机7-3,所述第二驱动电机7-3与其中一个转轴链传动连接。
所述动力站7-2为移动小车3、升降驱动电机5-3、曳引机7-1以及第二驱动电机7-3提供动力。
使用时,移动小车3沿环形圈梁2移动到一工位后,升降装置5控制竖型导轨梁6到一工位(高度方向上),清仓机器人7沿竖型导轨梁6上下移动,同时通过第二驱动电机7-3控制清扫器7-4转动清理仓壁;此一工位区域清理完成后,移动小车3沿环形圈梁2移动至下一工位,控制清仓机器人7重复上述工作,直至移动小车3沿环形圈梁2行走一圈,此时清仓机器人7对整个煤仓仓壁清理完成一个工位高度;然后升降装置5释放导轨梁6至第二工位(高度方向),按相同工作方式继续清理仓壁,直至仓壁全部清理完成。清扫器7-4一直在转动,即使在移动小车3沿环形圈梁2移动过程中,清扫器7-4也一直在转动。
见图1,竖型导轨梁6下端连接有短梁9,当移动小车3在环形圈梁2上移动时,短梁9清理掉清扫器7下方的粘煤。这样套筒8才能顺利的沿竖型导轨梁6移动到最下端,防止矩形框的下横梁担在煤壁上导致清扫器7-4接触不到煤壁无法工作。
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
- 一种智能煤仓清仓机器人
- 一种新型的煤仓清仓机器人