基于OCC双曝光时长相机接收模式与距离感知的车辆间通信实现方法
文献发布时间:2023-06-19 11:11:32
技术领域
本发明涉及光通信和智能交通技术领域,具体涉及一种基于OCC双曝光时长相机接收模式与距离感知的车辆间通信实现方法。
背景技术
光相机通信(Optical Camera Communication,OCC)以高速闪烁的LED作为发送端,自由空间作为信道,相机作为接收端实现信息的传输,是一种不受电磁干扰,绿色环保的通信技术。OCC技术以光作为载体,可以在网络质量较差的情况下,实现车联网中信息的可靠传输。同时,OCC技术以相机作为接收端,具有天然的分集接收优势,可在无需改变基础设施的情况下实现MIMO,因而将OCC技术应用于车联网中,可以为车辆的安全驾驶提供可靠的技术保障。
现有将OCC技术应用到车辆间通信的研究多集中于在固定发射模式与单一相机接收模式下探讨提高通信速率,扩大传输距离的方法。但是在实际场景中,这种单一固定的收发模式会极大限制车辆间通信的传输距离与通信质量。因而,在OCC车辆通信系统中,研究一种基于距离感知的自适应改变发送与接收模式的实现方法对于提高通信质量,扩大通信距离很有必要。
发明内容
本发明要解决的问题是提供一种在距离感知的情况下,接收端通过改变相机的曝光时长与解码阈值自适应实现不同距离下基于OCC双曝光时长相机接收模式与距离感知的车辆间通信实现方法。
为解决上述技术问题,本发明的基于OCC双曝光时长相机接收模式与距离感知的车辆间通信实现方法步骤如下:
步骤一、发送端采集待传输的信息,并按照短、中、长三种发送距离类别将信息分类形成三路码流α,β,γ:其中,α表示传输给短距离车辆码流,β表示传输给中距离车辆码流,γ表示传输给长距离车辆码流;
步骤二、对三路码流α,β,γ采用空间分级编码方式进行编码,形成待传输的信息帧中的数据帧;数据帧包括发送给短距离车辆的码流α,发送给中距离车辆的码流β和发送给长距离车辆的码流γ;信息帧中还包括多帧同步帧;
步骤三、将数据帧中的码与发送端N×M LED阵列中的LED相对应,完成码的映射;在发送一帧数据帧时:使用1×1大小的LED阵列块传输发送给短距离车辆码流α中的单比特信息,则发送端N×M的LED阵列可承载N×M比特的短距离码;使用n×m大小的LED阵列块传输发送给中距离车辆码流β中的单比特信息,且有(N×M)/(n×m)=K,K为大于1小于N×M的整数,则发送端N×M LED阵列可承载K比特的中距离码;使用N×M大小的LED阵列块传输发送给长距离车辆码流γ中的单比特信息,则发送端N×M的LED阵列可承载1比特的长距离码;发送一帧同步帧时:使用N×M大小的LED阵列块传输同步帧中的单比特信息;
步骤四、发送端N×M LED阵列中各LED经PWM调制将承载的对应数据帧与同步帧中的码元以光的形式发送出去;每帧数据帧和同步帧发送的时间长度均为t
步骤五、接收端以长曝光模式或短曝光模式通过接收多帧同步帧实现与发送端信息的同步并由同步帧估计解调后续数据帧时使用的灰度阈值;
步骤六、接收端依据接收的同步帧判断与发送端所属距离范围,并由此确定接收后续数据帧时使用的相机模式;设接收端相机拍摄到LED阵列在成像面上所占像素的个数为C
步骤七、基于步骤六对收-发距离的判断与接收端相机的模式选择,完成对数据帧信息的解调。
所述的步骤二中,每帧信息帧包括5帧同步帧与100帧数据帧,5帧同步帧对应的码元为5位巴克码11101。
所述的步骤四中,对一帧数据帧码元的发送方式为:发送端N×M LED阵列在时隙t
所述的步骤四中,对同步帧码元的发送方式为:各LED以占空比为100%的PWM波发送前两帧同步帧中的比特信息1;以占空比为P
所述的步骤五中,接收端由接收到的同步帧估计解调后续数据帧时使用的灰度阈值为T
对前两帧同步帧中LED阵列所在区域所有像素点的灰度值求和取平均得T
对第三帧同步帧中LED阵列所在区域所有像素点的灰度值求和取平均得T
对最后一帧同步帧中LED阵列所在区域所有像素点的灰度值求和取平均得T
所述的步骤七中,基于不同收-发距离与相机的接收模式,对数据帧信息解调方法如下:
当判断与发送端为长距离时:接收端以成像面上LED阵列所在位置为一整个解码区域,计算N×M个LED所在区域像素点的平均灰度值T
当判断与发送端为中距离时:接收端将成像面上LED阵列所在位置平均划分为K个解码区域,计算各解码区域中n×m个LED所在像素点的平均灰度值T
当判断与发送端为短距离时:接收端将成像面上LED阵列所在位置平均划分为N×M个解码区域,计算各解码区域下包含的单个LED灰度值T
本发明通过在发射端引入分级编码及分时隙传输的多级PWM调制技术,在接收端引入距离感知策略,使得接收端可以根据接收的LED图像判断当前与发送端所属距离类别,从长曝光与短曝光双模式中自适应选择针对此距离类别的相机接收模式,完成该模式下对发送端发送信息的解调解码过程,从而实现多距离下的车辆间通信。本发明提出的方法能有效提高基于OCC系统的车辆间通信质量,扩大通信距离,提高系统吞吐量。同时,本发明在发送端使用不同占空比的波形表示同步帧中的比特1,这种方法有利于解调时的灰度阈值估计,同时也能提高同步检测的准确性及信息传输的有效性。
附图说明
图1为基于OCC双曝光时长相机接收模式与距离感知的车辆间通信应用场景示意图。
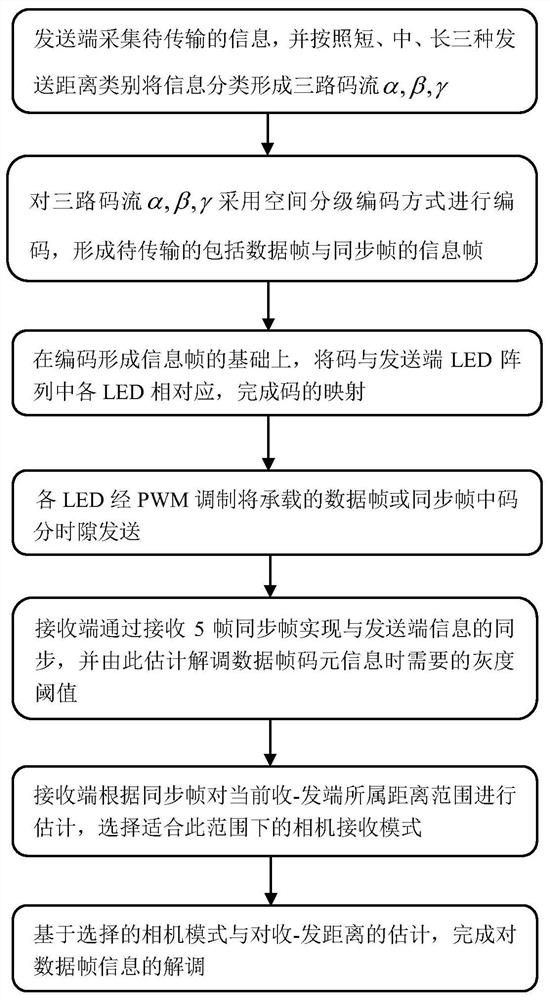
图2为本发明的流程图。
图3为信息帧示意图。
图4a、4b、4c分别为当发送端LED阵列单独传输64比特短距离码、4比特中距离码、1比特长距离码时各LED分配到码的示例图(以LED明暗状态表示1和0)。
图5a为发送端发送时隙时长与接收端相机两种曝光时长匹配示意图。
图5b为采用两级PWM调制示意图。
图6为接收端解码流程图。
具体实施方式
本发明提供一种基于OCC双曝光时长相机接收模式与距离感知的车辆间通信实现方法。为使本发明的技术方案及特点更加明确,下面将结合附图对本发明进行详细说明。
图1为基于OCC双曝光时长相机接收模式与距离感知的车辆间通信场景示意图。车A为发送端,车B、C、D为接收端,接收端相机包括长曝光时长与短曝光时长两种接收模式。车A将传输给车B、C、D的信息经尾部8×8LED阵列发送,车B、C、D通过对接收端相机拍摄到LED阵列所占像素数目的分析,自主判断与车A所属的距离范围类别,并由此选择合适的相机接收模式实现与车A的通信。本发明实现方法流程如图2所示。具体步骤如下:
步骤一、发送端采集待传输的信息,并按照短、中、长三种发送距离类别将信息分类形成三路码流α,β,γ。其中,α表示传输给短距离车辆码流,β表示传输给中距离车辆码流,γ表示传输给长距离车辆码流。发送端采集的信息包含发送端所在车辆的当前位置、车速、转向以及刹车信息等,这些信息经整理在发送给不同距离车辆时包含的内容会有所不同:传输给短距离车辆的信息会包含上述所有的行车细节,传输给中距离车辆的信息会忽略刹车信息,传输给长距离车辆的信息可能只包含发送端所在的位置信息;
步骤二、对步骤一中形成的三路码流α,β,γ采用空间分级编码方式进行编码,形成待传输的信息帧中的数据帧。信息帧包括:数据帧与同步帧。在基于OCC的车辆通信系统中,对发送端而言,一帧数据帧是由表示相关行车信息的比特码流组成;对接收端而言,相机以一帧图片的形式接收来自发送端的一帧数据帧,且数据帧的信息以图片中LED的灰度值记录,再经阈值判断后解码为原数据帧中的比特信息。信息帧的结构组成如图3所示,其中,数据帧包含车辆间通信传输的具体信息;一帧同步帧包含五位巴克码中的一位比特信息。且为方便接收端接收信息的及时性与灵活性,在每100帧数据帧前插入5帧同步帧,插入的5帧同步帧也可以使得接收端在检测收-发端状态是否同步的同时对下一组用于LED状态检测的图像灰度阈值进行预设定。具体实施过程如下:
(1)根据三种距离类别对三路码流进行分组,即α=(α
(2)在步骤(1)分组的基础上经分级编码整合形成待传输的数据帧。每个数据帧组成包括三部分:传输给长距离车辆的信息,传输给中距离车辆的信息和传输给短距离车辆的信息。设第n个数据帧为D
(3)每传输100帧数据帧前插入5帧同步帧以方便监视系统的实时同步性,每帧同步帧传输5位巴克码中的一位信息。
步骤三、在由步骤二编码形成信息帧的基础上,将码与发送端8×8LED阵列中的LED相对应,完成码的映射;再经调制过程将信息以光的形式发送出去。具体实施过程如下:
(1)对于一帧数据帧中的码元:使用1×1大小的LED阵列块传输α
(2)由(1),在发送数据帧信息时:8×8LED阵列中各LED承载3比特码;在发送同步帧信息时:8×8LED阵列中各LED承载1比特码。设在8×8的LED阵列中传输第n帧数据信息时,第k个LED承载的信息为L[k],则L[k]包含α
步骤四、8×8LED阵列中每个LED由步骤三获得数据帧或同步帧中的码元后,经PWM调制将表示的码以不同的时隙分配方式发送,如图5a所示。其中数据帧和同步帧发送的时间长度均为t
(1)发送一帧同步帧与数据帧的持续时间均为t
(2)发送数据帧时:以第k个LED发送第n数据帧时承载的信息
步骤五、接收端以双曝光时长中的任一种接收模式通过对5帧同步帧的接收实现与发送端信息的同步。同时依据接收的5帧同步帧,估计解调数据帧中的数据信息需要的灰度阈值。具体步骤如下:
(1)对前两帧同步帧中LED阵列所在区域所有像素点的灰度值求和取平均得T
(2)对第三帧同步帧中LED阵列所在区域所有像素点的灰度值求和取平均得T
(3)对最后一帧同步帧中LED阵列所在区域所有像素点的灰度值求和取平均得T
(4)接收端每接收一组同步帧均需要重新计算上述三个灰度阈值,并将其作为解码其后100帧数据帧的灰度阈值。
步骤六、接收端在完成对解调所需的灰度阈值进行估计的同时,亦需要根据同步帧对当前收-发端所属距离范围进行估计。为完成估计过程,需要预先设定短,中,长三个距离边界值,再由距离边界值设定用于接收端进行距离感知的各范围下的距离判断阈值。具体过程如下:
(1)根据发送端LED阵列中单个LED尺寸与接收端相机镜头焦距,设定d
对于OCC系统,当发送端的成像大小小于一个像素点面积时,认为接收端无法进行准确解调,因而发送端成像大小为一个像素点面积时对应的距离d,是实现通信的最大距离。设相机图像传感器的像素元尺寸为μ×μ,使用1×1LED阵列块传输短距离码流时的发送端等效半径为r
(2)接收端进行距离感知时使用的各距离判断阈值设置方法如下:
将公式(1)两边平方再与1/π相乘得:
设单个LED的实际面积大小为A,在距离d下的成像端面积大小为A
实际情况下接收端需要计算的是LED阵列所占成像面的像素个数,并依据所占像素个数判断所属距离范围。已知相机图像传感器的像素元尺寸为μ×μ,则在收-发距离为d时,成像端LED阵列所占像素个数为C
基于上述表达式即可得到在距离边界值为d
(3)对接收的同步帧图像进行以下操作:设当前相机拍摄到的LED阵列在成像面上所占的像素个数为C
(4)基于(3)的判断结果,当判定距离属于长距离范围时,接收端选择以长曝光时长接收该组同步帧后面的数据帧信息;当判定距离属于中,短距离范围时,接收端选择以短曝光时长接收该组同步帧后面的数据帧信息。
步骤七、基于步骤六的相机模式选择及对收-发距离估计,完成对数据帧信息进行解码的步骤如下:
(1)当判断发送端所处位置为长距离时:接收端以LED阵列所在位置为一整个解码区域,该区域包含的LED数目为8×8。通过计算此64个LED所在区域像素点的平均灰度值T
(2)当判断发送端所处位置为中距离时:接收端将LED阵列所在区域平均划分为四个解码区域,每个区域包含4×4个LED。通过计算每个区域中所有LED所在位置像素的平均灰度值T
(3)当判断发送端所处位置为短距离时:接收端将LED阵列所在区域平均划分为8×8个解码区域,每个区域包含1×1个LED。通过计算各区域下单个LED的灰度值T
本发明不限于上述实施例,其中LED阵列不限于8×8的LED阵列,传输发送给中距离车辆码流β中的单比特信息也不限于使用4×4大小的LED阵列块;对应的,每帧数据帧不限于包含64比特短距离码,4比特中距离码与1比特长距离码;另外,传输给中,短距离车辆的二进制数据信息为10和01时,不限于使用占空比为25%和75%的波形发送,只要使用占空比在0~50%以内、50%~100%之内,并且两者相差大于30%即可。同样,发送5帧同步帧时,第三帧和第五帧中的比特1也不限于用占空比为25%和75%的PWM波发送出去,只要使用占空比在0~50%以内、50%~100%之内,并且两者相差大于30%即可。同时发送端的同步帧也不限于使用5位巴克码,也可以使用7位或其他位数的巴克码以实现系统的同步,对应的,一帧信息帧的组成也不限于使用100帧数据帧与5帧同步帧,只要在保证系统可以依据同步帧实现同步的情况下满足一定的数据传输效率要求即可。
- 基于OCC双曝光时长相机接收模式与距离感知的车辆间通信实现方法
- 基于OCC双曝光时长相机接收模式与距离感知的车辆间通信实现方法