永磁电机的转子整体充磁对位装置及其方法
文献发布时间:2023-06-19 11:11:32
技术领域
本发明涉及转子充磁技术领域,尤其涉及一种永磁电机的转子整体充磁对位装置及其方法。
背景技术
永磁电机的转子整体充磁,是让转子中每个磁极一一对应有线圈,一次性对整个转子的所有磁极中的磁钢进行充磁,其核心技术是充磁线圈与转子磁极的位置一一对应,尤其是斜极、错极的转子,其定制的线圈也要对应做成斜极、错极的结构。充磁时,用高压电源对线圈瞬间放电,在短时间内通过大电流,在线圈中产生强磁场给转子磁极中的磁钢充磁。
在实际对转子充磁的操作中,转子与线圈的对位很关键,由于转子磁极都是对称设计的,当对位准确时,充磁瞬间,强磁场产生的磁力会在圆周方向上相互抵消,在轴向上也相互抵消;但由于线圈、转子的制造、安装以及充磁时对位存在误差,充磁时其磁力并没有完全抵消,会对转子产生圆周方向的扭力或轴向上的冲击力,使转子转动或跳动。充磁过程中强磁场克服磁钢的矫顽力对磁钢充磁,也是个赋能的过程,永磁电机转子的充磁要求足够强的磁场完成饱和充磁,如果充磁过程中,转子产生转动或跳动,会有能量损失,转化为转子的动能,严重时会导致充磁不饱和。
因此,需要对转子进行精确定位并限制其运动,现有技术中永磁电机转子整体充磁对位采用的是机械定位方式,即在圆周方向用定位销对准并插入转子的定位部(如定位孔、定位键槽或加强筋等特征凹凸点,以对应其放置角度位置)进行对位并定位,定位销对转子的定位会在充磁时承受可能存在的转子转动的扭力,阻止转子产生移动,保证能量转换效率。
但由于充磁时磁场很强,且设备和转子制造、安装及充磁前的对位操作必然存在误差,没有完全对准,充磁时会产生很大的扭力或冲击力,定位销克服扭力或冲击力会产生敲击噪音,可能损伤转子,多次冲击后甚至会出现断销等设备损坏的情况。
发明内容
本发明的目的是提供一种永磁电机的转子整体充磁对位装置,该对位装置通过位置传感器对转子本体的定位部进行对位,而不对其定位,允许转子本体移位,进而不会像定位销一样,去阻碍转子本体转动或跳动,进而避免损坏转子本体或设备,同时,还提供一种对位方法,该方法采用分步充磁的方式对转子本体进行充磁,可提高对位精度,保证充磁效率。
为实现上述目的,采用以下技术方案:
一种永磁电机的转子整体充磁对位装置,包括转子本体,且转子本体上设有定位部,还包括顶升旋转机构、布置于顶升旋转机构上方的下压机构,以及布置于顶升旋转机构与下压机构之间的充磁线圈和对位点;所述对位点处还安装有位置传感器;所述顶升旋转机构用于将经外部移载机构移载至其顶部的转子本体,顶升至充磁线圈内中的预定位置,并与下压机构相互配合以将转子本体初步限位固定;所述位置传感器用于检测定位部的位置,顶升旋转机构还用于驱动转子本体旋转,以使定位部与对位点进行初步对位。
进一步地,所述位置传感器为光电传感器。
进一步地,所述顶升旋转机构包括旋转模组、安装于旋转模组上的第一升降模组、与第一升降模组驱动连接的顶升柱,以及安装于顶升柱上的弹性垫。
进一步地,所述下压机构包括第二升降模组、与第二升降模组驱动连接的缓冲弹簧,以及安装于缓冲弹簧上的弹性压头。
进一步地,所述弹性垫与弹性压头上还均安装有压力传感器。
进一步地,所述永磁电机的转子整体充磁对位装置还包括警示器。
为实现上述目的,还提供一种永磁电机的转子整体充磁对位方法,包括
S1:将转子本体移动至顶升旋转机构的上方,顶升旋转机构驱动转子本体上升至充磁线圈内中的预定位置,并与下压机构相互配合以将转子本体初步夹紧固定;
S2:通过位置传感器检测转子本体上定位部的位置,顶升旋转机构驱动转子本体旋转,以使得定位部与对位点进行初步对位;
S3:以不饱和充磁电压对转子本体进行充磁,进而基于磁力修正定位部与对位点之间的角度偏差,以使得定位部与对位点进行精确对位;
S4:基于压力传感器检测并记录转子本体在不饱和充磁时的压力变化数值,并基于该压力变化数值判断转子本体的跳动方向,且若该压力变化数值超过预设的压力阈值时,则依据转子本体跳动方向反向调整转子本体的高度,以保证转子本体在充磁时处于预定位置;
S5:以饱和充磁电压对转子本体进行充磁。
进一步地,所述S1中的预定位置为转子本体在其轴向上的中心点,与充磁线圈在其轴向上的中心点的相互持平的位置。
进一步地,所述S3中的不饱和充磁电压介于饱和充磁电压的1/5~1/4之间。
采用上述方案,本发明的有益效果是:
1)通过位置传感器对转子本体的定位部进行对位,而不对其定位,允许转子本体移位,进而不会像定位销一样,去阻碍转子本体转动或跳动,进而避免损坏转子本体或设备;
2)在顶升柱上增加了弹性垫,在对转子本体充磁时,可缓冲其向下的冲击力,保证转子本体不易损坏;
3)在弹性垫和弹性压头上均安装了压力传感器,可在对转子本体充磁时,检测其压力变化,进而判断转子本体是否有跳动及其跳动的方向,以便对其位置进行修正;
4)充磁时,采用分步充磁的方式对转子本体进行充磁,即首先采用不饱和充磁电压对转子本体进行初步充磁,以借助磁力修正定位部与对位点之间的角度偏差,以使得定位部与对位点进行精确对位,随后,再以饱和充磁电压对转子本体进行二次充磁,由于经过初步充磁后,定位部与对位点精确对位,进而再次充磁时,磁力相互抵消,进而可避免转子本体受磁力影响偏离预定位置,保证充磁充分,提高充磁效率;
5)通过采用不饱和充磁电压对转子本体进行初步充磁,以修正转子本体的位置,可减少转子本体制造误差带来的位置偏差,提高对位精度,减少能量损耗、降低充磁时的冲击噪音。
附图说明
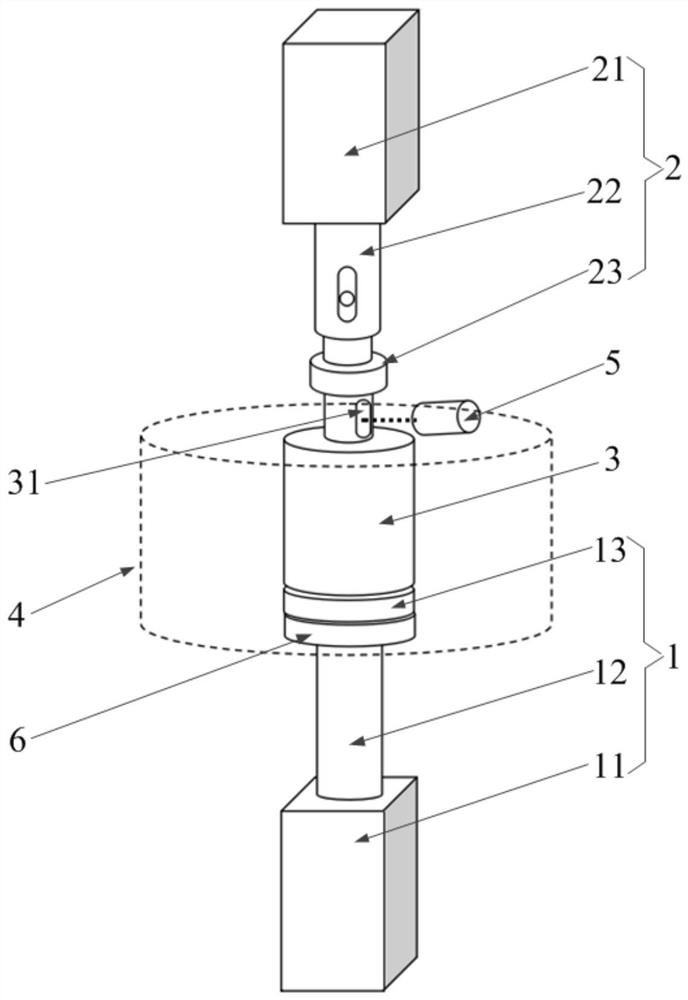
图1为本发明的结构示意图;
图2为本发明的对位方法的流程性框图;
其中,附图标识说明:
1—顶升旋转机构; 2—下压机构;
3—转子本体; 4—充磁线圈;
5—位置传感器; 6—压力传感器;
11—第一升降模组; 12—顶升柱;
13—弹性垫; 21—第二升降模组;
22—缓冲弹簧; 23—弹性压头;
31—定位部。
具体实施方式
以下结合附图和具体实施例,对本发明进行详细说明。
参照图1所示,本发明提供一种永磁电机的转子整体充磁对位装置,包括转子本体3,且转子本体3上设有定位部31,还包括顶升旋转机构1、布置于顶升旋转机构1上方的下压机构2,以及布置于顶升旋转机构1与下压机构2之间的充磁线圈4和对位点;所述对位点处还安装有位置传感器5;所述顶升旋转机构1用于将经外部移载机构移载至其顶部的转子本体3,顶升至充磁线圈4内中的预定位置,并与下压机构2相互配合以将转子本体3初步限位固定;所述位置传感器5用于检测定位部31的位置,顶升旋转机构1还用于驱动转子本体3旋转,以使定位部31与对位点进行初步对位。
其中,所述位置传感器5为光电传感器;所述顶升旋转机构1包括旋转模组、安装于旋转模组上的第一升降模组11、与第一升降模组11驱动连接的顶升柱12,以及安装于顶升柱12上的弹性垫13;所述下压机构2包括第二升降模组21、与第二升降模组21驱动连接的缓冲弹簧22,以及安装于缓冲弹簧22上的弹性压头23;所述弹性垫13与弹性压头23上还均安装有压力传感器6;所述永磁电机的转子整体充磁对位装置还包括警示器。
还提供一种永磁电机的转子整体充磁对位方法,包括
S1:将转子本体3移动至顶升旋转机构1的上方,顶升旋转机构1驱动转子本体3上升至充磁线圈4内中的预定位置,并与下压机构2相互配合以将转子本体3初步夹紧固定;
S2:通过位置传感器5检测转子本体3上定位部31的位置,顶升旋转机构1驱动转子本体3旋转,以使得定位部31与对位点进行初步对位;
S3:以不饱和充磁电压对转子本体3进行充磁,进而基于磁力修正定位部31与对位点之间的角度偏差,以使得定位部31与对位点进行精确对位;
S4:基于压力传感器6检测并记录转子本体3在不饱和充磁时的压力变化数值,并基于该压力变化数值判断转子本体3的跳动方向,且若该压力变化数值超过预设的压力阈值时,则依据转子本体3跳动方向反向调整转子本体3的高度,以保证转子本体3在充磁时处于预定位置;
S5:以饱和充磁电压对转子本体3进行充磁。
其中,所述S1中的预定位置为转子本体3在其轴向上的中心点,与充磁线圈4在其轴向上的中心点的相互持平的位置;所述S3中的不饱和充磁电压介于饱和充磁电压的1/5~1/4之间。
本发明工作原理:
继续参照图1所示,本实施例中,该对位装置还可包括布置于顶升旋转机构1与下压机构2之间的传送机构,可将需要充磁的转子本体3逐一传送至顶升旋转机构1的上方(也可人工将转子本体3移送至顶升旋转机构1的上方,在此不作限制),随后,顶升旋转机构1驱动转子本体3上升至充磁线圈4内中的预定位置,并与下压机构2相互配合以将转子本体3初步夹紧固定;预定位置可为转子本体3在其轴向上的中心点,与充磁线圈4在其轴向上的中心点的相互持平的位置,即可将该顶升行程记录保存,每次充磁时,通过顶升旋转机构1驱动转子本体3上升至相同的行程即可;对位点处设有位置传感器5(光电传感器),可检测定位部31(可为定位孔、定位键槽或加强筋等特征凹凸点,以对应其放置角度位置)与对位点是否初步对位,若有角度偏差,则通过顶升旋转机构1驱动转子本体3旋转,以使定位部31与对位点对位,摒弃了常规的采用机械定位销的方式对定位部31进行对位定位的方式,可只对定位部31进行对位而不定位,进而在对转子本体3充磁时,可避免因定位销阻碍转子本体3转动而产生的噪音及损害转子本体3的情况发生,进而提高操作的安全性;同时,该对位装置还设有警示器,其可为蜂鸣报警器,在光电传感器未感应到定位部31与对位点对位时,可发出警示,以便工作人员继续调整转子本体3的位置。
顶升旋转机构1的旋转模组和第一升降模组11可分别为旋转电机和升降电机,在此不作限制,可驱动转子本体3做升降及旋转运动,以调整转子本体3的位置,同时,在顶升柱12上增加了弹性垫13,在对转子本体3充磁时,可缓冲其向下的冲击力,保证转子本体3不易损坏;下压机构2的第二升降模组21也可为升降电机,在此不作限制,可驱动缓冲弹簧22、弹性压头23下压转子本体3,以将转子本体3初步固定;缓冲弹簧22及弹性压头23均具有一定的弹性力,可缓冲转子本体3向上的冲击力,避免其损坏;此外,在弹性垫13和弹性压头23上均安装了压力传感器6,可在对转子本体3充磁时,检测其压力变化,进而判断转子本体3是否有跳动及其跳动的方向,若压力数值超过预设的压力阈值,则适当调整转子本体3的高度,以使得充磁时,转子本体3的中心高度尽量靠近于预定的高度。
在对转子本体3进行充磁时,不对其定位,仅靠转子本体3自身惯性和对顶摩擦力及缓冲压力对可能产生的转动或跳动做阻尼,允许转子本体3移位,进而不会像定位销一样,去阻碍转子本体3转动或跳动,进而避免损坏转子本体3;充磁时,采用分步充磁的方式对转子本体3进行充磁,即首先采用不饱和充磁电压对转子本体3进行初步充磁,以借助磁力修正定位部31与对位点之间的角度偏差(初步对位时,可能存在一定的角度偏差),以使得定位部31与对位点进行精确对位,随后,再以饱和充磁电压(正常充磁电压)对转子本体3进行二次充磁,由于经过初步充磁后,定位部31与对位点精确对位,进而再次充磁时,磁力相互抵消,进而可避免转子本体3受磁力影响偏离预定位置,保证充磁充分,提高充磁效率;此外,在对转子本体3进行批量充磁时,可统计归纳多个转子本体3在充磁后的高度偏差,且若该高度偏差量均趋于某一数值,则基于该数值对转子本体3的初始位置进行反向修正后,再对其进行充磁动作。
基于分步充磁,可提高充磁对位精度的原理性说明如下:
假设原来转子本体3是在逆时针方向偏差了1°,那么磁力的方向是向着顺时针方向的,不饱和充磁电压充磁时转子本体3会受磁力向顺时针方向加速运动,但当转子本体3到达磁力平衡的对位点时,磁力仅在径向上,而圆周方向上没有分量了,也就是在圆周方向上没有了加速度,但这时转子本体3已经经过了一段时间的加速,其转速不为0,会越过对位点继续往顺时针方向运动;但当转子本体3在顺时针方向产生位移后,磁力在圆周方向的分量又出现了,但力的方向改变为向逆时针方向,这会让转子减速运动,转子在逆时针方向上同时还会受到顶升旋转机构1及下压机构2与转子本体3接触部分的摩擦力,摩擦力与磁力在圆周方向的分量一起使转子本体3转动减速,当转子本体3转动速度减到0时,转子本体3在顺时针方向上已经偏离了一小段距离,磁力的方向是逆时针方向的,又会让转子本体3逆时针做加速转动,如此往复,直到磁力消失或不足以克服摩擦阻力使转子本体3移动时,才停下来;由于摩擦阻力的存在,转子本体3的这个往复运动的距离是逐次递减的,最后停下来时的位置将比原来的位置更接近于磁力平衡的对位点,进而可以提高转子本体3对位精度。
以上仅为本发明的较佳实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 永磁电机的转子整体充磁对位装置及其方法
- 转子铁芯、永磁电机转子及其充磁装置和装配方法