一种基于三维激光扫描监测采矿塌陷区地面沉降的方法
文献发布时间:2023-06-19 11:13:06
技术领域
本发明属于岩土工程地表变形测量技术领域,更具体涉及一种基于三维激光扫描监测采矿塌陷区地面沉降的方法,它适用于采矿塌陷区地面沉降长期监测。
背景技术
目前,地下矿产资源的开发引起的各种环境问题接踵而至,其中矿区地表移动和沉陷尤为突出,每月的沉陷量可达1m。特别是采用崩落法开采的地下金属矿山,往往在地表形成大规模塌陷、开裂和沉降,成为金属矿山地下采矿的重大安全和地质环境问题。为了能够及时了解和预测采矿塌陷区地表沉降分布和演化规律,以便确保矿山安全运营和指导井下安全生产,迫切需要对采矿塌陷区的地表变形进行长期监测。传统的接触式测量方法(GPS、水准等)需要进入采矿塌陷区进行接触式监测,由于采矿塌陷区的岩层移动和地表变形尤为剧烈,在地下矿体开采过程中往往会在地表突然不断地产生大规模塌陷,严重威胁到测量人员的生命安全。此时,考虑到测量人员的人身安全,传统的接触式测量方法(GPS、水准等)已经无法满足采矿塌陷区地面沉降监测。近几年来,三维激光扫描技术作为发展起来的新兴非接触式变形监测方法,可以有效地对采矿塌陷区地表进行大范围的扫描沉降监测。
目前采用三维激光扫描技术对采矿塌陷区地面沉降进行监测的方法主要是:在塌陷区附近地表测站点处架设三脚架,然后在三脚架上架设三维激光扫描仪获取采矿塌陷区地表点云数据。之后,依据相邻两测站点之间公共特征点或公共标靶球进行点云数据拼接,从而将其它测站点的点云数据转换到某一基准测站点坐标系下,并利用传统的接触式测量方法(GPS、水准、全站仪等)获取该基准测站点当地坐标系统下的三维坐标,进而得到整个塌陷区当地坐标系统下的高程数据。然而,现有的基于三维激光扫描的采矿塌陷区地面沉降监测装置和方法存在以下缺点:
(1)由于采矿塌陷区附近地表变形较为剧烈,使得这些区域地表表层岩土体比较破碎和松软,这就导致了在采矿塌陷区附近地表架设三脚架往往很不稳定,即使通过调节使得三脚架上的圆角三角形盘处于水平状态,而当把比较笨重的三维激光扫描仪安装在三脚架上时,此时由于三维激光扫描仪的较大重量,往往导致三脚架的下端因插入到不稳定的地表表层岩土体而移动,从而使得三脚架的圆角三角盘倾斜而处于不水平状态,甚至有时有可能在测量过程中造成圆角三角盘从测量之初的水平状态变为不水平状态,从而导致测量结果的显著误差,无法应用到工程实际。虽然能在稍微远离采矿塌陷区比较稳定的区域架设三脚架,但是此时由于障碍物遮挡,及三维激光扫描仪架设高度有限而较深的塌陷部位难以被三维激光扫描仪直视的原因,往往难以获取采矿塌陷区地表的全部点云数据,特别是塌坑坑底的点云数据。所以,现有的采用三脚架来架设三维激光扫描仪的方法很难满足对采矿塌陷区的地面沉降进行监测。
(2)在现有的三脚架上采用三维激光扫描仪获取采矿塌陷区地表点云数据和采用常用的接触式测量方法GPS定位仪获取基准测站点的三维坐标时,需要人工采用卷尺量取从三维激光扫描仪扫描高度的量高标志和GPS定位仪的天线量高标志到三脚架在地面的对中观测点的距离,这样往往因人为量高时,卷尺两端在对准量高标志和地面的对中观测点时存在显著误差,有时候该误差会达到10 mm左右,这样的误差在对于矿区地表变形监测是不允许的,比如,一般采用水准对地表沉降进行测量时的测站误差允许值要求不大于1 mm。所以,因人为量取三维激光扫描仪的扫描高度和GPS定位仪的天线高度,造成的误差有时是不满足工程测量要求的。另外,传统的采用三脚架来架设三维激光扫描仪和GPS定位仪的方法,在测量时都需要调节三脚架对中地面上的观测点,整个测量过程耗时长,操作复杂。
(3)现有的对三维激光各测站点扫描所得的点云数据拼接的主要方法是依据两测站点之间公共特征点或公共标靶球进行拼接,这样往往会造成各测站点之间点云数据误差的累积,产生的传递误差随测站数增多而增大,极大地降低了扫描数据的精度。
因此,为了对采矿塌陷区地表沉降进行长期有效的监测,迫切需要一种基于三维激光扫描的采矿塌陷区地面沉降监测装置和方法,达到准确和高效地获取采矿塌陷区的地表点云数据。
发明内容
为此,针对现有技术的不足,本发明提供了一种基于三维激光扫描监测采矿塌陷区地面沉降的方法,该方法使用专门设计的前视基盘、后视基盘、可升降的支腿,装置结构简单,造价低廉。当由于地表变形使得监测墩倾斜时,能够通过实时调节,使得安装在监测墩上的基盘处于水平状态,并且在该装置上可以直接安装三维激光扫描仪,以及通过三角对中座和对中螺丝来安装GPS定位仪,保证在前视基盘上的中心凹盘和其边缘处定位孔里先后安装三维激光扫描仪和GPS定位仪。更为重要的是,本装置可以不需要量取三维激光扫描仪的扫描高度(当把三维激光扫描仪安装在本装置的前视基盘上时,扫描高度为零),并且能够通过安装在前后视基盘上的激光测距仪准确地获取GPS定位仪的天线高度,大大提高了采矿塌陷区地表沉降监测的便利性、准确性和高效性。可广泛应用于采矿塌陷区地面沉陷长期监测。
本发明的一种基于三维激光扫描监测采矿塌陷区地面沉降的方法,通过获取测站点与定位点的三维坐标,建立每个测站点获取的三维点云数据的坐标系,将不同测站点获取的三维点云数据基于坐标拼合,在采矿塌陷区周围不同角度观测了采矿塌陷区地表,避免被障碍物遮挡的面和塌坑坑底点的点云数据无法采集的问题,提高了采矿塌陷区点云数据的精确度,能更精确地获得前后时期测量出的采矿塌陷区的地表沉降值。
为了实现上述目的,本发明采用以下技术方案:
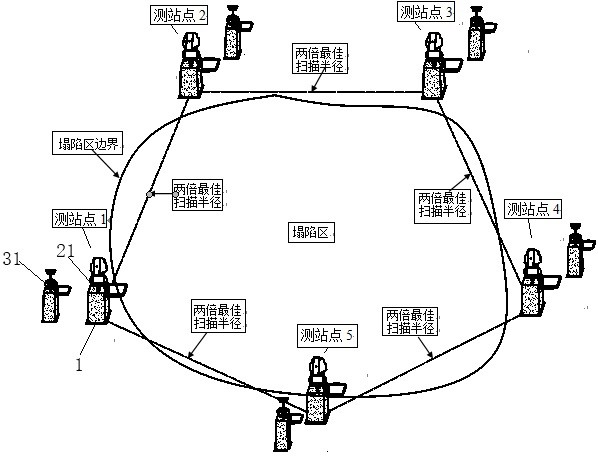
一种基于三维激光扫描监测采矿塌陷区地面沉降的方法,步骤S01. 根据采矿塌陷区的范围和三维激光扫描仪的最佳扫描半径在围绕采矿塌陷区周边附近地表布设多个测站点,相邻两个测站点的间距为两倍的三维激光扫描仪的最佳扫描半径,采矿塌陷区的中心与各测站点的间距不大于两倍的三维激光扫描仪的扫描半径,使以每个测站点为中心位置绘制的所有圆形的面积覆盖采矿塌陷区,每个测站点旁布置相应的定位点,所述圆形的半径为三维激光扫描仪的扫描半径;
步骤S02. 分别在测站点和定位点埋设两个混凝土监测墩,每个混凝土监测墩的顶端面均竖立有三个可升降的支腿,三个支腿均与混凝土监测墩顶面垂直并呈等边三角分布,测站点的三个支腿顶端续接前视基盘,定位点的三个支腿顶端续接后视基盘,前视基盘和后视基盘顶面靠近边缘位置嵌有圆水平气泡;
步骤S03. 调节支腿长度使前视基盘和后视基盘水平,在前视基盘上放置三维激 光扫描仪,在后视基盘的中心竖立十字螺钉,调节三维激光扫描仪上的目镜,使目镜里的十 字标志对准十字螺钉顶端部位的十字丝。然后,通过三维激光扫描仪扫描采矿塌陷区并获 得地面三维点云数据
步骤S04. 取下三维激光扫描仪和十字螺钉,在前视基盘和后视基盘上放置GPS定位仪和激光测距仪,用GPS定位仪测量GPS定位仪在测站点和定位点的三维坐标。然后,使该三维坐标的高程减去用激光测距仪测得的GPS定位仪的天线量高标志到前视基盘和后视基盘的距离,得到测站点和定位点的三维坐标,分别对应于测站点上三维激光扫描仪的三维坐标,和定位点的三维坐标;
步骤S05. 按照步骤S03~S04,用三维激光扫描仪在各个测站点采集点云数据,用GPS定位仪采集各个测站点和定位点的三维坐标。然后,把各个测站点和定位点的三维坐标导入到与GPS定位仪配套的坐标数据后处理软件Magnet tools中,进行基线解算和网平差,获得各个测站点和定位点在采矿塌陷区坐标系下的绝对三维坐标;
步骤S06. 将各个测站点采集的点云数据导入到与三维激光扫描仪配套的点云数据后处理软件Maptek I-Site Studio,根据GPS定位仪测得的各个测站点和定位点在采矿塌陷区坐标系下的绝对三维坐标,采用绝对三维坐标下的多站点云数据配准算法对各个测站点获取的点云数据进行拼接,具体步骤如下:
步骤J01. 选取一组点云数据及对应的测站点和定位点在采矿塌陷区坐标系中的绝对三维坐标,依据采矿塌陷区坐标系中定位点和测站点的水平坐标向量确定对应点云数据在水平平面内的方位,并使采矿塌陷区坐标系中测站点的绝对三维坐标与对应点云数据中的原点平移映射,将点云数据经旋转平移转换到采矿塌陷区坐标系中,使所有激光脚点一一映射至采矿塌陷区坐标系中。
旋转平移模型可表示为
步骤J02. 依次选取剩余的点云数据及对应的测站点和定位点在采矿塌陷区坐标系中的绝对三维坐标,重复步骤J01将剩余的各点云数据转换到采矿塌陷区坐标系中,待各拼接点云融合,从而获取整个采矿塌陷区的完整地表点云数据。
步骤S07. 对整个采矿塌陷区的完整地表点云数据进行滤波、去噪处理,并生成整个采矿塌陷区的数字高程模型,从而获得整个采矿塌陷区的扫描地形,即获得采矿塌陷区地表各点的高程数据I
步骤S08. 在下一个观测期按照步骤S03~S07重复获取采矿塌陷区地表各点的高程数据I
进一步地,所述前视基盘的中心开设有中心凹盘并靠近该中心凹盘边缘开设有三个等边三角布置的定位孔,该定位孔的轮廓与三维激光扫描仪底座的突出部分互相配合,后视基盘的中心开设有中心凹盘并在该中心凹盘中心设置中心孔。
进一步地,步骤S03中在前视基盘上放置三维激光扫描仪和在后视基盘的中心竖立十字螺钉的步骤包括:将三维激光扫描仪的底座嵌入定位孔及中心凹盘,在后视基盘的中心凹盘中放置十字螺钉,使十字螺钉底端嵌入中心孔;所述十字螺钉靠近底端处设有基盘,该基盘与中心凹盘的轮廓吻合,十字螺钉底端与中心孔的轮廓吻合。
进一步地,步骤S04中在前视基盘和后视基盘上放置GPS定位仪的步骤包括:将GPS定位仪底座上的螺纹孔分别与三角对中座和对中螺丝顶端的螺杆螺纹连接,然后在前视基盘和后视基盘的中心凹盘放置安装有GPS定位仪的三角对中座和对中螺丝;所述三角对中座和对中螺丝上端设有与GPS定位仪底座耦合的螺杆,三角对中座下端设有与三个定位孔及中心凹盘吻合的三个支脚及基盘;所述对中螺丝下端与中心孔吻合,对中螺丝靠近下端设有与中心凹盘吻合的基盘。
进一步地,所述的前视基盘和后视基盘的中心凹盘旁布置有与激光测距仪尺寸吻合的竖直矩形方形孔,激光测距仪安装在矩形方形孔里时,激光测距仪的顶端面与前视基盘或后视基盘上表面所在的平面处于同一平面;所述矩形方形孔中部设有与激光测距仪读数窗和按钮键吻合的开口,矩形方形孔下端的两侧面还设有可穿过螺钉的圆形孔,激光测距仪下端设有与两圆形孔对应的通孔,使螺钉依次穿过圆形孔和激光测距仪的下端后能固定激光测距仪,打开激光测距仪,当激光测距仪发射的激光照准GPS定位仪上端接收机上的量高标志下边沿水平面时,按下读数按钮键准确地获取此时GPS定位仪的天线高,用于准确地获取测站点和定位点的三维坐标。
进一步地,所述支腿包括套管和滑杆,套管埋设在混凝土监测墩的顶端面内且与顶端面垂直并呈等边三角分布,埋设好的套管顶端面与混凝土监测墩顶端面处于同一水平面,滑杆下部套于套管内与套管螺纹连接,滑杆上端设有球形体,前视基盘或后视基盘的底面边缘设有三个等边三角布置的球形腔,滑杆上端与球形腔转动连接形成球形铰结构,滑杆中部设有凸环。
进一步地,步骤S02中所述两个混凝土监测墩之间距离15~25m,高程相差1m以内。
本发明具有以下优点和积极效果:
(1)快速实时调平。每次测量时,能够通过调节支腿使前视基盘和后视基盘处于水平状态,即使由于采矿引起的岩层和地表变形导致混凝土监测墩有一定程度的倾斜,也能通过调节使得前视基盘和后视基盘处于水平状态。更为重要的是,滑杆上端球形体与基盘底面边缘设有的球形腔相互形成球形铰结构而能转动连接,使得滑杆上端可以在基盘底面的球形腔里大范围自由旋转,极大地增大了调平量程,故该装置能够对采矿塌陷区地表沉降进行长期监测。
(2)精度和稳定性高。主要包括以下几个方面:首先,由于埋设的混凝土监测墩底端穿过地表表层比较破碎和松散的岩土体而嵌入比较稳固的岩土层里,使得混凝土监测墩虽然有变形但还是比较稳定;而现有技术中采用三脚架支撑三维激光扫描仪时,三脚架上的物体重量增加较多或重心改变会使已经调平的三脚架下沉或倾斜,而本发明的监测装置和方法在测量时前视基盘和后视基盘在调平后不会因为承载的物体重量较大、重心发生变化导致混凝土监测墩底端发生移动而基盘发生倾斜,能保证在基盘上先后放置三维激光扫描仪和GPS定位仪的测量过程中基盘一直处于水平状态。
设置混凝土监测墩,还可以保证三维激光扫描仪长期固定在原始的测站点对采矿塌陷区的地表进行扫描变形监测,这样使得测站点的平面坐标在下一次测量时偏移较小。
其次在测量时,三维激光的扫描高度和GPS定位仪的天线高度可以不用人工采用卷尺进行量测,当在本装置上安装三维激光扫描仪时,其扫描高度为零。而在使用GPS定位仪获取测站点和定位点的三维坐标时,安装在前视基盘和后视基盘上的激光测距仪可以依据激光准确地获取GPS定位仪的天线高度。因此本监测装置的方法不需人工拉卷尺测量三维激光扫描仪扫描高度的量高标志和GPS定位仪的天线量高标志到地面对中点的距离,可以显著地减少因人为量取三维激光扫描仪的扫描高度和GPS定位仪的天线高度而造成的误差。
最后,在获取整个采矿塌陷区的地表点云数据时,根据GPS定位仪测量所得的测站点和定位点的三维坐标来进行拼接不同测站点获取的点云数据,避免了现有技术中依据两测站点之间公共特征点或公共标靶球进行拼接时的误差传递和累积,这样能保证各测站点获得的点云数据在拼接时的准确性。
(3)本发明的测量方法在采矿塌陷区周围不同角度观测了采矿塌陷区地表,避免了单一三维激光扫描仪扫描时被障碍物遮挡的面和塌坑坑底点的点云数据无法采集的问题,提高了采矿塌陷区点云数据的精确度,能更精确地获得前后时期测量出的采矿塌陷区的地表沉降值。
(4)方便和快捷性。使用本发明的装置,可以不携带在扫描测量时目前广泛采用的三脚架来架设三维激光扫描仪,并且可以大大减少在测量时因使用三脚架而对中的时间,这样大大地方便了测量和节约了时间成本。
(5)经济性好。本发明的装置和方法主要建设设施包括混凝土监测墩以及安装在监测墩上面的前视基盘和后视基盘,使用的对中螺丝、三角对中座和十字螺钉可以多处循环往复使用,测量装置和方法整体投入小、经济性好、维护量小。
所述的三维激光扫描仪为目前全世界最主流的三维激光扫描仪生产厂家Maptek公司生产的HDS和XR系列超长测程三维激光扫描测量系统,最大测距可达2400 m,测量精度为5 mm,最佳扫描半径可根据三维激光扫描仪的扫描参数来确定,该系列的三维激光扫描仪底座底端设有与本装置前视基盘中心处的定位孔和中心凹盘相互吻合的突出部分,其目镜设在扫描仪上部可旋转体的中部。
所述的激光测距仪为杜克LS-P微型激光测距仪,最大测距40 m,测量精度高达1mm。
附图说明
图1为本发明测站点布置示意图;
图2为本发明基于三维激光扫描的采矿塌陷区地面沉降监测装置结构示意图;
图3为本发明中前视基盘装配后的上部结构示意图;
图4为本发明中前视基盘装配后的下部结构示意图;
图5为本发明中前视基盘装配好GPS定位仪后的结构示意图;
图6为本发明中三角对中座的结构示意图;
图7为本发明中后视基盘装配后的上部结构示意图;
图8为本发明中后视基盘装配后的下部结构示意图;
图9为本发明中对中螺丝的结构示意图;
图10为本发明中十字螺钉的结构示意图;
图11为本发明中支腿的滑杆的结构示意图;
图12为本发明中与滑杆下端相互配套的套管结构示意图;
图13 为本发明中滑杆上部与基盘底面边缘相互连接的球形铰结构的半剖结构示意图;
图14 为本发明中三维激光扫描仪在测站点1采集到的采矿塌陷区地表点云数据;
图15 为本发明中三维激光扫描仪在测站点2采集到的采矿塌陷区地表点云数据;
图16 为本发明中三维激光扫描仪在测站点3采集到的采矿塌陷区地表点云数据;
图17 为本发明中三维激光扫描仪在测站点4采集到的采矿塌陷区地表点云数据;
图18 为本发明中三维激光扫描仪在测站点5采集到的采矿塌陷区地表点云数据;
图19为各个测站点和定位点在采矿塌陷区坐标系下的绝对三维坐标;
图20为Maptek I-Site Studio软件基于坐标拼接的界面;
图21为拼接所得的整个采矿塌陷区高精度完整地表点云数据;
图22为整个采矿塌陷区的数字高程模型;
图23为整个采矿塌陷区的扫描地形图;
图24为获得的采矿塌陷区部分高程数据。
具体实施方式
下面结合工程实例对本发明的装置和方法做进一步的详细说明,目的在于使本领域技术人员对本发明的装置和方法有更详尽的理解和认识,以下实施例不应在任何程度上被理解为对本发明的装置和方法请求保护范围的限制。
实施例1:
下面结合附图对本发明作进一步详细描述:
根据图1~图13所示,一种基于三维激光扫描监测采矿塌陷区地面沉降的方法,
步骤S01. 根据采矿塌陷区的范围和三维激光扫描仪5的最佳扫描半径在围绕采矿塌陷区周边附近地表布设多个测站点,如图1所示;围绕采矿塌陷区的相邻两个测站点的间距为两倍的三维激光扫描仪5的最佳扫描半径,采矿塌陷区的中心与各测站点的间距不大于两倍的三维激光扫描仪5的扫描半径,使以每个测站点为中心位置绘制的所有圆形的面积覆盖采矿塌陷区,每个测站点旁布置相应的定位点,所述圆形的半径为三维激光扫描仪5的扫描半径,所述的三维激光扫描仪5为目前全世界最主流的三维激光扫描仪生产厂家Maptek公司生产的HDS和XR系列超长测程三维激光扫描测量系统,最大测距可达2400 m,测量精度为5 mm,其目镜设在扫描仪上部可旋转体的中部;
步骤S02. 分别在测站点和定位点埋设两个混凝土监测墩1,两个混凝土监测墩1之间距离15~25m,高程相差1m以内,由于两个混凝土监测墩1之间邻近,两者的沉降量也接近。如图2所示,每个混凝土监测墩1的顶端面均竖立有三个可升降的支腿20,三个支腿20均与混凝土监测墩1顶面垂直并呈等边三角分布,测站点的三个支腿20顶端续接前视基盘21,定位点的三个支腿20顶端续接后视基盘31;如图11和图12,支腿20包括套管24和滑杆23,套管24埋设在混凝土监测墩1的顶端面内,埋设好的套管24顶端面与混凝土监测墩1顶端面处于同一水平面,滑杆23下部套于套管24内与套管24螺纹连接,滑杆23上端设有球形体292;如图4和图8,前视基盘21或后视基盘31的底面边缘设有三个等边三角布置的球形腔29,滑杆23上端与球形腔29转动连接形成球形铰结构,滑杆23中部设有凸环27,转动凸环27即能调节支腿20的高度;如图3、图5、图7,前视基盘21和后视基盘31顶面靠近边缘位置嵌有圆水平气泡22,前视基盘21的中心开设有中心凹盘25并靠近该中心凹盘25边缘开设有三个等边三角布置的定位孔26,该定位孔26的轮廓与三维激光扫描仪5底座的突出部分互相配合,后视基盘31的中心开设有中心凹盘25并在该中心凹盘25中心设置中心孔352;
如图4和图8所示,前视基盘21和后视基盘31的中心凹盘25旁布置有与激光测距仪4尺寸吻合的竖直矩形方形孔42,激光测距仪4安装在矩形方形孔42里时,激光测距仪4的顶端面与前视基盘21或后视基盘31上表面所在的平面处于同一平面,矩形方形孔42中部设有与激光测距仪4读数窗和按钮键吻合的开口44,矩形方形孔42下端的两侧面还设有可穿过螺钉43的圆形孔46,激光测距仪4下端设有与两圆形孔46对应的通孔,使螺钉43依次穿过圆形孔46和激光测距仪4的下端后能固定激光测距仪4,激光测距仪4为杜克LS-P微型激光测距仪,最大测距40 m,测量精度高达1mm;
步骤S03.调节支腿20长度使前视基盘21和后视基盘31水平,在前视基盘21上放置 三维激光扫描仪5,使三维激光扫描仪5的底座嵌入定位孔26及中心凹盘25,在后视基盘31 的中心凹盘25中放置十字螺钉8,使十字螺钉8底端嵌入中心孔352,调节三维激光扫描仪5 上的目镜,使目镜里的十字标志对准十字螺钉8顶端部位的十字丝82。然后,通过三维激光 扫描仪5扫描采矿塌陷区并获得地面三维点云数据
其中,如图2所示,三维激光扫描仪5的量高标志91位于三维激光扫描仪5的底端面处,当三维激光扫描仪5放置在前视基盘21上时,此时三维激光扫描仪5的底端面与前视基盘21接触,故三维激光扫描仪5的量高标志91相对于前视基盘21的高度为零。
步骤S04.取下三维激光扫描仪5和十字螺钉8,将GPS定位仪9底座上的螺纹孔分别与三角对中座6和对中螺丝7顶端的螺杆62螺纹连接,然后在前视基盘21和后视基盘31的中心凹盘25放置安装有GPS定位仪9的三角对中座6和对中螺丝7。同时,在前视基盘21和后视基盘31的中心凹盘25旁处的竖直矩形方形孔42里安装激光测距仪4,当激光测距仪4发射的激光41照准GPS定位仪9上端接收机上的量高标志91下边沿水平面时,按下读数按钮键准确地获取GPS定位仪9的天线高。最后,用GPS定位仪9测量GPS定位仪9在测站点和定位点的三维坐标,进行GPS 静态测量,观测时段长度为60 分钟;
所述三角对中座6和对中螺丝7上端设有与GPS定位仪9底座耦合的螺杆62,三角对中座6下端设有与三个定位孔26及中心凹盘25吻合的三个支脚63及基盘81,所述对中螺丝7下端与中心孔352吻合,对中螺丝7靠近下端设有与中心凹盘25吻合的基盘81;
步骤S05. 按照步骤S03~S04,用三维激光扫描仪5在各个测站点采集点云数据,参见图14~图18,用GPS定位仪9采集各个测站点和定位点的三维坐标。然后,把各个测站点和定位点的三维坐标导入到与GPS定位仪9配套的坐标数据后处理软件Magnet tools中,进行基线解算和网平差,获得各个测站点和定位点在采矿塌陷区坐标系下的绝对三维坐标,参见图19;
步骤S06. 如图20,将各个测站点采集的点云数据导入到与三维激光扫描仪5配套的点云数据后处理软件Maptek I-Site Studio,根据GPS定位仪9测得的各个测站点和定位点在采矿塌陷区坐标系下的绝对三维坐标,采用绝对三维坐标下的多站点云数据配准算法对各个测站点获取的点云数据进行拼接,具体步骤如下:
步骤J01. 选取一组点云数据及对应的测站点和定位点在采矿塌陷区坐标系中的 绝对三维坐标,依据采矿塌陷区坐标系中定位点和测站点的水平坐标向量确定对应点云数 据在水平平面内的方位,并使采矿塌陷区坐标系中测站点的绝对三维坐标与对应点云数据 中的原点平移映射,将点云数据经旋转平移转换到采矿塌陷区坐标系中,使所有激光脚点 一一映射至采矿塌陷区坐标系中。旋转平移模型可表示为
步骤J02. 依次选取剩余的点云数据及对应的测站点和定位点在采矿塌陷区坐标系中的绝对三维坐标,重复步骤J01将剩余的各点云数据转换到采矿塌陷区坐标系中,待各拼接点云融合,从而获取整个采矿塌陷区的完整地表点云数据,如图21。
步骤S07.对整个采矿塌陷区的完整地表点云数据进行滤波、去噪处理,并生成整个采矿塌陷区的数字高程模型,如图22,从而获得整个采矿塌陷区的扫描地形,即获得采矿塌陷区地表各点的高程数据(I
步骤S08.在下一个观测期按照步骤S03~S07重复获取采矿塌陷区地表各点的高程数据(I
- 一种基于三维激光扫描监测采矿塌陷区地面沉降的方法
- 一种基于三维激光扫描监测采矿塌陷区地面沉降的方法