一种散料抓取装置及工作方式和应用
文献发布时间:2023-06-19 11:13:06
技术领域
本发明属于工业机器人技术领域,具体涉及一种散料抓取装置及工作方式和应用。
背景技术
目前对抓取末端的研究主要集中在形态固定的物体上,关于散料抓取末端的研究较少。以酿酒业为代表的酿造业生产中存在大量的散料抓取类工作,如酒胚抓取需要将形态零散的酒胚从地缸中取出,目前酒厂对酒胚从地缸中取出这一步骤仍采用人工实现,不仅浪费人力资源,而且无法适应当前自动化的产业趋势,无法与自动化车间实现无隙配合,生产效率低。
申请号为201621058124.6的文献公开了一种多功能窖池出醅装置,该装置通过叉齿对散料进行插入式抓取,利用叉齿抓取散料易造成散料的掉落,抓取形式单一且效率低。
因此,本申请提出一种将旋转式抓取和插入式抓取相结合的抓取装置,实现对散料的高效率、低损害抓取。
发明内容
针对现有技术的不足,本发明拟解决的技术问题是,提供一种散料抓取装置及工作方式和应用。
本发明解决所述技术问题采用的技术方案是:
一种散料抓取装置,其特征在于,该装置包括组件移动平台、旋转式抓取组件和插入式抓取组件,旋转式抓取组件和插入式抓取组件均安装在组件移动平台上;
所述旋转式抓取组件包括主动圆弧面手指、被动圆弧面手指、支撑架、支撑杆、手指驱动电机、传动机构、手指连接轴及驱动杆;
所述支撑杆的上端与组件移动平台的相应组件升降件的下端固连,支撑杆的下端固定有支撑架;支撑架底部的两侧分别固定有手指连接轴,支撑架底部的中间固定有传动机构实现由动力源到驱动杆的力矩传递;主动圆弧面手指和被动圆弧面手指的两端分别与各自的手指连接轴转动连接,主动圆弧面手指位于被动圆弧面手指的内侧,两个圆弧面手指之间能够相对转动;驱动杆的一端与传动机构连接,另一端与主动圆弧面手指的一侧固连;
所述插入式抓取组件包括料筒、抓料手指及驱动机构;所述料筒的顶部封闭,底部具有开口,底部的中间具有横杆;两个抓料手指的一侧分别与料筒的横杆转动连接;当两个抓料手指处于水平位置时,能将料筒底部的开口完全闭合。
所述主动圆弧面手指外表面的两侧分别具有凸缘,被动圆弧面手指内表面的一侧具有凸缘,主动圆弧面手指未连接驱动杆的一侧的凸缘与被动圆弧面手指的凸缘配合,实现被动圆弧面手指的向下旋转进而实现散料抓取;主动圆弧面手指连接驱动杆的一侧的凸缘与被动圆弧面手指的凸缘配合,实现被动圆弧面的向上旋转进而实现散料的倒出,此时主动圆弧面手指和被动圆弧面整体区域的圆心角为80-90°。
所述支撑架底部的中间具有两个吊耳,底部的两端均具有端耳和支撑块;手指连接轴两端分别与端耳和支撑块固连;被动齿轮安装轴的两端分别与支撑架的两个吊耳转动连接。
所述支撑杆为偏心杆;安装时,支撑杆偏向于与两个圆弧面手指所在初始位置相对的一侧。
所述传动机构包括主动齿轮、主动齿轮安装轴、被动齿轮及被动齿轮安装轴;主动齿轮安装轴一端与手指驱动电机连接一端与支撑件旋转固定,主动齿轮固定在主动齿轮安装轴上并与被动齿轮啮合,被动齿轮安装轴转动连接在支撑架底部中间的两个吊耳上,被动齿轮固定在被动齿轮安装轴上。
所述驱动杆的另一端通过支座与主动圆弧面手指固连,支座与主动圆弧面手指连接的面为弧面。
所述驱动机构包括抓料手指驱动电机和驱动绳;两个抓料手指驱动电机均安装在料筒的顶部,每个抓料手指驱动电机的输出轴上均套装有驱动绳,每根驱动绳与各自的抓料手指固连。
所述组件移动平台包括纵向导轨、横向导轨、导轨驱动电机、导轨驱动齿轮、组件安装架驱动电机、组件安装架驱动齿轮、组件安装架和组件升降件;
两个纵向导轨安装在外部散料抓取平台上,纵向导轨上具有齿条;两个横向导轨滑动安装在两个纵向导轨上;横向导轨上具有齿条;横向导轨的两端分别安装有导轨驱动电机,导轨驱动电机的输出轴上固定有与纵向导轨的齿条啮合的导轨驱动齿轮;
每个横向导轨上均滑动安装有组件安装架;组件安装架驱动电机固定在组件安装架上,组件安装架驱动电机的输出轴上固定有与横向导轨的齿条啮合的组件安装架驱动齿轮;组件升降件的上端与组件安装架连接,组件升降件的下端与相应的抓取组件连接。
一种散料抓取装置的工作方式,当抓取工作初始阶段,散料分布平整插入阻力大,抓取组件插入过程中受到的阻力大,此时旋转式抓取组件单独工作;当抓取过程中遇到阻力小且需要高效率抓取时,插入式抓取组件单独工作;若在抓取过程遇到的阻力大且需要进行快速抓取的情况,可以先使用旋转式抓取组件将散料挖出凹坑,然后使用插入式抓取组件对散料进行大体积抓取。
一种散料抓取装置的应用,其特征在于,该装置用于酿酒行业中的酒胚抓取。
与现有技术相比,本发明的有益效果是:
1.本发明采用两种性能不同的抓取组件相互配合的方式实现抓取动作,相较于单一抓取末端,效率更高、对散料损害性更小。
2.旋转式抓取组件的主动圆弧面手指和被动圆弧面手指通过旋转运动完成对散料的抓取,旋转式抓取组件在抓取过程中两个圆弧面手指采用包络式抓取,圆弧面手指通过旋转运动完成对散料的抓取,在初始状态即旋转角度为零时,圆弧面手指与散料之间仅存在一个向下的挤压力,随着旋转角度的增加,圆弧面手指对散料的向下挤压力会逐渐减小,在旋转至90度后转变为向上的挤压力,也就是随着旋转角度的增加圆弧面手指对散料的挤压力由最大的向下挤压力到最大的向上挤压力过渡,由于圆弧面手指顶部呈敞开状态所以向上的挤压力造成的阻力很小,保证了散料的完整性和疏松度,主要用于粘性散料抓取工作初始阶段,此时散料分布平整,松散度小,抓取过程受到的阻力较大;但是旋转式抓取组件的有效抓取体积为半球型,一次抓取的量较小。主动圆弧面手指和被动圆弧面手指能够形成底部封闭的半球型结构,保证散料不会掉落。
3.插入式抓取组件由于其有效抓取体积为整个料筒,抓取的量大,但是在抓取过程中,随着散料进入料筒中,筒壁对于散料的挤压作用增大,因此抓取受到的阻力较大,对于松散度较小的散料,抓料手指向上收起过程中受到的阻力则较大,因此主要应用在抓取过程中遇到阻力较小且需要高效率抓取的情况,例如对较松散的散料进行直接快速抓取。若在抓取过程遇到的阻力较大且需要进行快速抓取的情况,可以先使用旋转式抓取组件将散料挖出凹坑,然后使用插入式抓取组件对散料进行大体积抓取。
4.本发明的插入式抓取组件的两个手指均处于水平位置时,两个手指完全盖合料筒的底部开口,能实现对散料的下部封闭性抓取,减少散料在抓取完成后的运输过程中的掉落。插入式抓取组件的抓料手指通过驱动绳实现转动,驱动绳的一端为抓料手指提供向上的拉力,另一端为抓料手指提供支撑力,使抓取更有效,进一步防止散料掉落。
附图说明
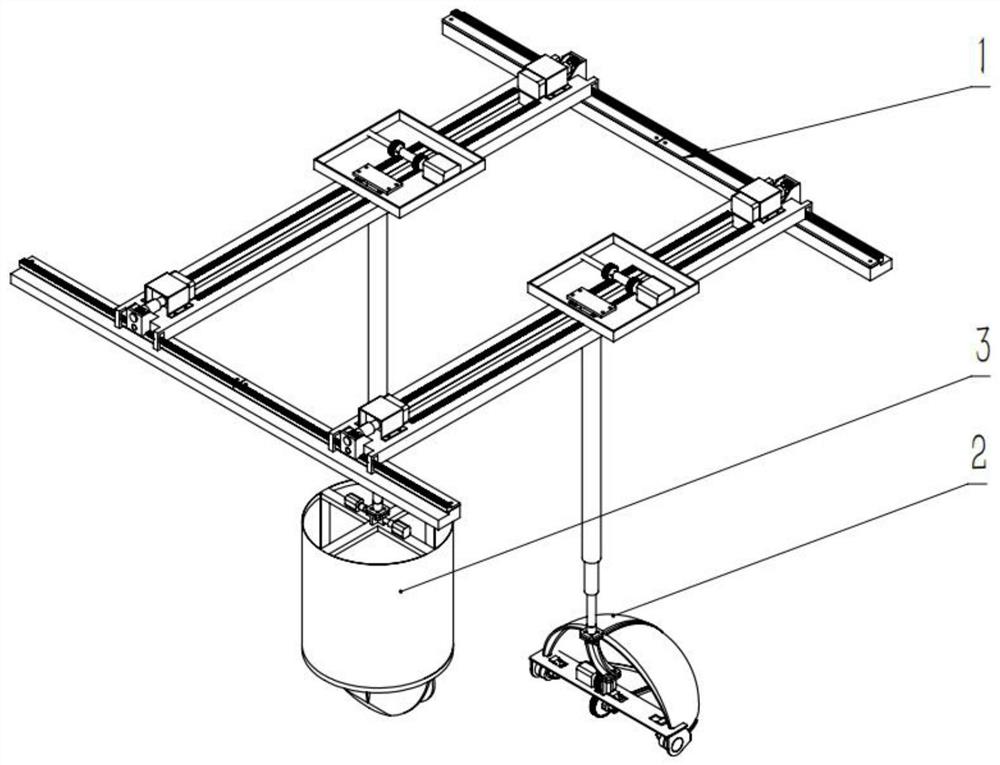
图1为本发明的整体结构示意图;
图2为本发明的组件移动平台的结构示意图;
图3为本发明的纵向导轨与横向导轨的安装示意图;
图4为本发明的组件安装架与横向导轨的安装示意图;
图5为本发明的旋转式抓取组件的结构示意图;
图6为本发明的插入式抓取组件的结构示意图;
图中,1-组件移动平台;2-旋转式抓取组件;3-插入式抓取组件;
101-纵向导轨;102-横向导轨;103-导轨驱动电机;104-导轨驱动齿轮;105-一号齿轮轴;106-组件安装架驱动电机;107-组件安装架驱动齿轮;108-二号齿轮轴;109-组件安装架;110-组件升降件;
201-主动圆弧面手指;202-被动圆弧面手指;203-支撑架;204-支撑杆;205-支座;206-主动齿轮;207-被动齿轮;208-主动齿轮安装轴;209-被动齿轮安装轴;210-圆弧面手指驱动电机;211-手指连接轴;212-驱动杆;203-1、吊耳;203-2、端耳;203-3、支撑块;
301-料筒;302-抓料手指;303-合页;304-抓料手指驱动电机。
具体实施方式
为了使本发明更加通俗易懂,下文结合具体实施方式及附图进一步阐述本发明的技术方案,并不用于限定本申请的保护范围。
本发明为一种散料抓取装置(简称装置,参见图1-6),包括组件移动平台1、旋转式抓取组件2和插入式抓取组件3,旋转式抓取组件2和插入式抓取组件3均安装在组件移动平台1上;当抓取工作初始阶段,散料分布平整,松散度小时,旋转式抓取组件2单独工作;当抓取过程中遇到阻力小且需要高效率抓取时,插入式抓取组件3单独工作;若在抓取过程遇到的阻力大且需要进行快速抓取的情况,可以先使用旋转式抓取组件2将散料挖出凹坑,然后使用插入式抓取组件3对散料进行大体积抓取;
所述组件移动平台1包括纵向导轨101、横向导轨102、导轨驱动电机103、导轨驱动齿轮104、一号齿轮轴105、组件安装架驱动电机106、组件安装架驱动齿轮107、二号齿轮轴108、组件安装架109和组件升降件110;
两个纵向导轨101间隔安装在外部散料抓取平台上,纵向导轨101上具有齿条;两个横向导轨102滑动安装在两个纵向导轨101上,横向导轨102的两端均具有一号卡钩,一号卡钩与纵向导轨101上的齿条卡接,实现纵向导轨101与横向导轨102之间的限位;横向导轨102上具有齿条;横向导轨102的两端分别安装有导轨驱动电机103,导轨驱动电机103的输出轴通过联轴器固连有一号齿轮轴105,一号齿轮轴105上固定有与纵向导轨101的齿条啮合的导轨驱动齿轮104;导轨驱动电机103带动导轨驱动齿轮104转动,使导轨驱动齿轮104沿着纵向导轨101的齿条运动,实现横向导轨102在纵向导轨101上的往复滑动;
每个横向导轨102上均滑动安装有组件安装架109,组件安装架109的底部具有二号卡钩,二号卡钩与横向导轨102的齿条卡接,实现组件安装架109与横向导轨102之间的限位;组件安装架驱动电机106固定在组件安装架109上,组件安装架驱动电机106的输出轴通过联轴器固连有二号齿轮轴108,二号齿轮轴108上固定有与横向导轨102的齿条啮合的组件安装架驱动齿轮107;组件安装架驱动电机106带动组件安装架驱动齿轮107转动,使组件安装架驱动齿轮107沿着横向导轨102的齿条运动,实现组件安装架109在横向导轨102上的往复滑动;每个组件安装架109均与各自的组件升降件110的上端连接,组件升降件110的下端与各自的抓取组件连接;
所述旋转式抓取组件2包括主动圆弧面手指201、被动圆弧面手指202、支撑架203、支撑杆204、主动齿轮206、被动齿轮207、主动齿轮安装轴208、被动齿轮安装轴209、手指驱动电机210、手指连接轴211和驱动杆212;
所述支撑杆204的上端与对应的组件升降件110的下端固连,支撑杆204的下端固定有支撑架203;支撑架203底部的中间具有两个吊耳203-1,底部的两端均具有端耳203-2和支撑块203-3;两个手指连接轴211位于支撑架203的两侧,手指连接轴211两端分别与端耳203-2和支撑块203-3固连;主动圆弧面手指201和被动圆弧面手指202的两端分别通过轴承与各自的手指连接轴211转动连接,主动圆弧面手指201位于被动圆弧面手指202的内侧,两个圆弧面手指之间能够相对转动;圆弧面手指驱动电机210安装在支撑架203上,圆弧面手指驱动电机210的输出轴通过联轴器连接有主动齿轮安装轴208,主动齿轮安装轴208上固定有主动齿轮206;被动齿轮安装轴209的两端分别通过轴承与支撑架203的两个吊耳203-1转动连接,被动齿轮207固定在被动齿轮安装轴209上,被动齿轮207与主动齿轮206啮合;驱动杆212的一端固定在被动齿轮安装轴209上,另一端与主动圆弧面手指201的一侧固连;
圆弧面手指驱动电机210带动主动齿轮206转动,主动齿轮206带动被动齿轮207转动,使被动齿轮安装轴209转动,进而使驱动杆212转动,使主动圆弧面手指201实现往复转动;
主动圆弧面手指201外表面的两侧分别具有凸缘,被动圆弧面手指202内表面的一侧具有凸缘;使用时,主动圆弧面手指201朝向远离被动圆弧面手指202的方向转动一定角度后,主动圆弧面手指201未连接驱动杆212的一侧的凸缘与被动圆弧面手指202的凸缘配合(两个凸缘接触,不连接),此时主动圆弧面手指201继续转动,带动被动圆弧面手指202一起转动,实现散料抓取;当散料抓取完毕后,主动圆弧面手指201反向转动,主动圆弧面手指201未连接驱动杆212的一侧的凸缘与被动圆弧面手指202的凸缘脱离配合,转动一定角度后,主动圆弧面手指201连接驱动杆212的一侧的凸缘与被动圆弧面手指202的凸缘配合,此时主动圆弧面手指201继续反向转动,带动被动圆弧面手指202一起反向转动,完成散料的倒出,两个圆弧面手指复位,即可进行下一次抓取动作;
所述插入式抓取组件3包括料筒301、抓料手指302、合页303、抓料手指驱动电机304和驱动绳(图中未画出);
所述料筒301的顶部封闭,底部具有开口,底部的中间具有横杆;两个抓料手指302的一侧分别通过合页303与料筒301的横杆转动连接,当两个抓料手指302处于水平位置时,能将料筒301底部的开口完全闭合;两个抓料手指驱动电机304均安装在料筒301的顶部,每个抓料手指驱动电机304的输出轴上均缠绕有驱动绳,驱动绳的中部缠绕在抓料手指驱动电机304的输出轴上,每根驱动绳的两端与各自的抓料手指302的上、下表面固连;当抓料手指驱动电机304的输出轴转动时,实现驱动绳的一端伸长,另一端缩短,进而实现抓料手指302的打开或收起。
所述支撑杆204为偏心杆,安装时支撑杆204偏向于与两个圆弧面手指初始位置相对的一侧,避免当两个圆弧面手指处于竖直位置时,支撑杆204与两个圆弧面手指干涉。
所述主动圆弧面手指201和被动圆弧面手指202的圆心角均为80°至90°之间。
所述驱动杆212的另一端通过支座205与主动圆弧面手指201固连,支座205与主动圆弧面手指201连接的一面为弧面,增加接触面积,提高驱动杆212和主动圆弧面手指201的使用寿命,减小变形。
所述组件升降件110为电动推杆、液压缸等。
本发明的工作原理和工作流程是:
导轨驱动电机103通过一号齿轮轴105带动导轨驱动齿轮104转动,使导轨驱动齿轮104沿着纵向导轨101的齿条运功,实现横向导轨102在纵向导轨101上的往复滑动;组件安装架驱动电机106通过二号齿轮轴108带动组件安装架驱动齿轮107转动,使组件安装架驱动齿轮107沿着横向导轨102的齿条运动,实现组件安装架109在横向导轨102上的往复滑动;调整横向导轨102与组件安装架109的位置,将旋转式抓取组件2或插入式抓取组件3调整至合适位置,然后组件升降件110开始升降,使旋转式抓取组件2或插入式抓取组件3调整至指定位置。
圆弧面手指驱动电机210带动主动齿轮206转动,主动齿轮206带动被动齿轮207转动,使被动齿轮安装轴209转动,进而使驱动杆212转动,使主动圆弧面手指201实现往复转动;
使用时,主动圆弧面手指201朝向远离被动圆弧面手指202的方向转动一定角度后,主动圆弧面手指201未连接驱动杆212的一侧的凸缘与被动圆弧面手指202的凸缘配合,此时主动圆弧面手指201继续转动,带动被动圆弧面手指202一起转动,实现散料抓取;当散料抓取完毕后,主动圆弧面手指201反向转动,主动圆弧面手指201未连接驱动杆212的一侧的凸缘与被动圆弧面手指202的凸缘脱离配合,转动一定角度后,主动圆弧面手指201连接驱动杆212的一侧的凸缘与被动圆弧面手指202的凸缘配合,此时主动圆弧面手指201继续转动,带动被动圆弧面手指202一起反向转动,完成散料的倒出,同时两个圆弧面手指复位,即可进行下一次抓取动作。
抓料手指驱动电机304的输出轴转动,通过驱动绳与抓料手指驱动电机304的输出轴之间的摩擦力实现驱动绳的升降,实现抓料手指302的转动;使用时,首先抓料手指302运动至竖直位置,然后与插入式抓取组件3连接的组件升降件110向下运动,同时抓料手指驱动电机304的输出轴正转,使驱动绳与抓料手指302下表面连接的一端缩短,与抓料手指302上表面连接的一端伸长,使抓料手指302保持竖直,并竖直插入料堆内;然后抓料手指驱动电机304的输出轴反转,使驱动绳与抓料手指302下表面连接的一端伸长,与抓料手指302上表面连接的一端短缩,使抓料手指302向水平位置转动,直到运动到水平位置,散料被收集在料筒301内,至此完成抓料动作;待插入式抓取组件3运动至放料位置,与插入式抓取组件3连接的组件升降件110向下运动,使抓料手指302朝向竖直位置转动,以此完成放料工作。
本发明未述及之处适用于现有技术。
- 一种散料抓取装置及工作方式和应用
- 一种抓取装置及应用该抓取装置的机械手