一种基板平面矫正方法、系统及贴合设备
文献发布时间:2023-06-19 11:14:36
技术领域
本发明涉及芯片/元器件贴合技术领域,尤其涉及一种基板平面矫正方法、系统及贴合设备。
背景技术
随着LED行业的发展,LED晶圆尺寸变小,同样PCB面积的灯珠数更多,这就对固晶机的良率有了更高的要求,而在不良情况里,压碎晶圆的情况是最严重的,返修也很困难。而目前主流的摆臂固晶机由于固晶板(固晶板例如是PCB板)的平整度很难达到要求的误差范围内,从而导致固晶过程中会产生压碎/裂晶圆的情况,影响良率。
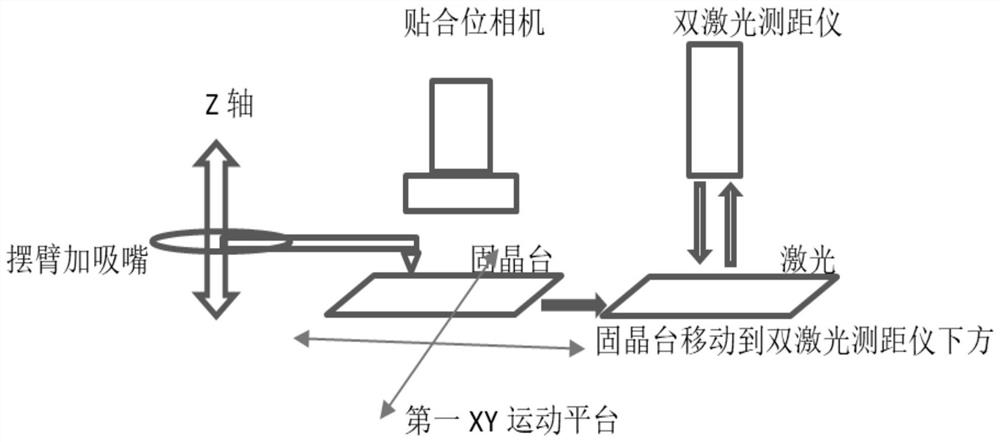
如图1所示,目前主流的摆臂固晶机,摆臂取到料后旋转到固晶台已通过视觉定位和XY运动平台运动后的贴合位,再通过Z轴下降至贴合高度,将晶圆固定到位。
缺点:由于固晶板的平整度不能达到要求范围内,导致不同位置的固晶点高度不一致,且由于无法探测每点的高度,所以摆臂Z轴无法调整每点高度,Z轴每次只能以相同高度下降固晶,从而导致晶圆在每个固晶点受力大小不一致,最终导致压碎晶圆,影响良率。
发明内容
本发明提供了一种基板平面矫正方法,包括如下步骤:
扫描计算步骤:控制贴合台移动至激光测距仪下方,通过激光测距仪对贴合台上的基板进行扫描,得到扫描数据后计算出基板各个点的相对高度偏差值;
贴合步骤:控制贴合头移动至元器件供给台上方,使贴合头吸取元器件;控制贴合台移动至贴合位相机下方,在贴合的时候,将得到的基板各个点的相对高度偏差值在每次贴合头运动到基板相应点时(基板相应点是指基板上该点的XY坐标)补偿到贴合头的Z轴运动坐标,从而使每次贴合头的Z轴下降高度等于贴合点的实际高度。
本发明还提供了一种基板平面矫正系统,包括:
扫描计算模块:用于控制贴合台移动至激光测距仪下方,通过激光测距仪对贴合台上的基板进行扫描,得到扫描数据后计算出基板各个点的相对高度偏差值;
贴合模块:用于控制贴合头移动至元器件供给台上方,使贴合头吸取元器件;控制贴合台移动至贴合位相机下方,在贴合的时候,将得到的基板各个点的相对高度偏差值在每次贴合头运动到基板相应点时(基板相应点是指基板上该点的XY坐标)补偿到贴合头的Z轴运动坐标,从而使每次贴合头的Z轴下降高度等于贴合点的实际高度。
本发明还提供了一种贴合设备,包括贴合台、激光测距仪、贴合位相机、贴合头、以及驱动所述贴合头运动的贴合头驱动机构,所述贴合头设有吸嘴,所述贴合台用于放置基板,该贴合设备还包括驱动所述贴合台运动的贴合台驱动机构,所述贴合台驱动机构用于驱动所述贴合台在所述激光测距仪与所述贴合位相机之间进行位置切换(主要用来走贴合位,即,驱动贴合台移动至激光测距仪检测基板是否平整,驱动贴合台移动至贴合位相机位置进行芯片贴合),所述激光测距仪用于对所述贴合台上的基板进行扫描,得到扫描数据后计算出基板各个点的相对高度偏差值,所述贴合头驱动机构驱动所述贴合头将元器件运送至所述贴合台的基板上进行贴合,在贴合的时候,将得到的基板各个点的相对高度偏差值在每次贴合头运动到基板相应点时(基板相应点是指基板上该点的XY坐标)补偿到贴合头的Z轴运动坐标,从而使每次贴合头的Z轴下降高度等于贴合点的实际高度。
作为本发明的进一步改进,所述贴合台驱动机构包括第一XY运动平台,所述第一XY运动平台用于驱动所述贴合台进行XY方向运动。
作为本发明的进一步改进,该贴合设备还包括元器件供给台,所述元器件供给台用于放置元器件。
作为本发明的进一步改进,所述贴合头驱动机构包括摆臂,所述贴合头安装在所述摆臂上,通过所述摆臂的运动使所述贴合头在所述元器件供给台和所述贴合台之间运动,同时该摆臂也可以进行Z轴运动,即,摆臂能够进行纵向垂直的移动,从而完成贴合动作。
作为本发明的进一步改进,该贴合设备还包括取料位相机,所述取料位相机位于所述元器件供给台上方。
作为本发明的进一步改进,该贴合设备还包括第二XY运动平台,所述第二XY运动平台用于驱动所述元器件供给台进行XY方向运动。
作为本发明的进一步改进,所述激光测距仪为双激光测距仪。
作为本发明的进一步改进,该贴合设备为固晶机,所述元器件为晶圆,所述元器件供给台为晶圆环,所述贴合台为固晶台。
本发明的有益效果是:本发明将得到的基板各个点的相对高度偏差值在每次摆臂运动到相应点时补偿到Z轴运动坐标,从而使每次Z轴下降高度正好等于固晶点的实际高度,不会出现过高和过低现象导致压碎晶圆,能提高良率。
附图说明
图1是背景技术的摆臂固晶机的固晶方法示意图;
图2是本发明贴合设备的原理框图;
图3是本发明一实施例的原理框图。
具体实施方式
如图2所示,本发明公开了一种贴合设备,本发明的元器件包括现有的芯片及元器件。
该贴合设备包括元器件供给台、贴合台、贴合头、以及驱动所述贴合头运动的贴合头驱动机构,所述贴合头设有吸嘴,所述元器件供给台用于放置元器件,所述贴合台用于放置基板(例如PCB),所述贴合头驱动机构用于驱动所述贴合头将所述元器件供给台上的所述元器件运送至所述贴合台的基板上进行贴合;该贴合设备还包括激光测距仪、以及驱动所述贴合台运动的贴合台驱动机构,所述贴合台驱动机构用于驱动所述贴合台在所述激光测距仪与所述贴合位相机之间进行位置切换(主要用来走贴合位,即,驱动贴合台移动至激光测距仪检测基板是否平整,驱动贴合台移动至贴合位相机位置进行芯片贴合),所述激光测距仪用于对所述贴合台上的基板进行扫描,得到扫描数据后计算出基板各个点的相对高度偏差值,所述贴合头驱动机构驱动所述贴合头将元器件运送至所述贴合台的基板上进行贴合,在贴合的时候,将得到的基板各个点的相对高度偏差值在每次贴合头运动到基板相应点时(基板相应点是指基板上该点的XY坐标)补偿到贴合头的Z轴运动坐标,从而使每次贴合头的Z轴下降高度等于贴合点的实际高度。
所述贴合台驱动机构包括第一XY运动平台,所述第一XY运动平台用于驱动所述贴合台进行XY方向运动。
该贴合设备还包括贴合位相机,所述贴合位相机位于所述贴合台上方。
所述贴合头驱动机构包括摆臂,所述贴合头安装在所述摆臂上,通过所述摆臂的运动使所述贴合头在所述元器件供给台和所述贴合台之间运动,同时该摆臂也可以进行Z轴运动,即,摆臂能够进行纵向垂直的移动,从而完成贴合动作。
该贴合设备还包括取料位相机,所述取料位相机位于所述元器件供给台上方。
该贴合设备还包括第二XY运动平台,所述第二XY运动平台用于驱动所述元器件供给台进行XY方向运动。
作为本发明的优选实施例,所述激光测距仪为双激光测距仪。
如图3所示,该贴合设备为固晶机,所述元器件为晶圆,所述元器件供给台为晶圆环,所述贴合台为固晶台。
本发明还公开了一种基板平面矫正方法,包括如下步骤:
扫描计算步骤:控制贴合台移动至激光测距仪下方,通过激光测距仪对贴合台上的基板进行扫描,得到扫描数据后计算出基板各个点的相对高度偏差值;
贴合步骤:控制贴合头移动至元器件供给台上方,使贴合头吸取元器件;控制贴合台移动至贴合位相机下方,在贴合的时候,将得到的基板各个点的相对高度偏差值在每次贴合头运动到基板相应点时(基板相应点是指基板上该点的XY坐标)补偿到贴合头的Z轴运动坐标,从而使每次贴合头的Z轴下降高度等于贴合点的实际高度。
本发明将得到的基板各个点的相对高度偏差值在每次摆臂运动到相应点时补偿到Z轴运动坐标,从而使每次Z轴下降高度正好等于固晶点的实际高度,不会出现过高和过低现象导致压碎晶圆,能提高良率。
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
- 一种基板平面矫正方法、系统及贴合设备
- 基板贴合方法及基板贴合设备