一种用于精密气体流量阀的控制系统及方法
文献发布时间:2023-06-19 11:14:36
技术领域
本发明涉及精密气体流量阀技术领域,尤其涉及一种用于精密气体流量阀的控制系统及方法。
背景技术
气体流量控制在半导体、光伏、面板、医疗等方面得到发展与应用,如扩散、CVD、等离子刻蚀、光刻、溅射、离子注入、真空镀膜等工艺。随着中国半导体工业、光伏、平板显示的快速发展,对腐蚀性流体、易沉积的高分子气体、黏性液体、微小流量的精确计量提出了更高的要求。而当前国内大多数的控制阀的驱动元件为电磁力矩马达,存在着体积大、结构复杂、精度低等诸多不足,而流体控制领域对高速、精密控制阀需求的不断增加,传统电磁控制阀已不能满足高速、精密控制的要求。
发明内容
针对现有技术存在的问题,本发明提供了用于精密气体流量阀的控制系统及方法:利用压电陶瓷驱动流量阀的主阀芯,实现对阀芯与阀体开合间位移的精密控制,从而实现对流量阀开口量的控制,实现微流体、高速精密控制。
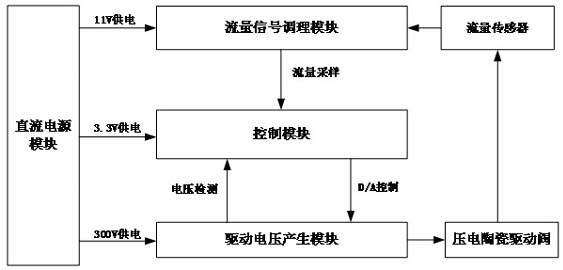
本发明解决其技术问题所采用的技术方案是:一种用于精密气体流量阀的控制系统,由直流电源模块、驱动电压产生模块、控制模块、流量信号调理模块和流量传感器以电信号方式连接。
直流电源模块由三路独立输出的电源组成,第一路电源作为流量信号调理模块的供电电源,供电电压值为11V;第二路电源作为控制模块的供电电源,供电电压值为3.3V;第三路电源作为驱动电压产生模块的供电电源,供电电压值为300V;
驱动电压产生模块由控制模块的D/A输出电压控制第三路电源电压输出,用于驱动压电陶瓷片,使陶瓷片产生形变来改变流量;驱动电压产生模块的DC/DC单元的控制信号由控制模块的D/A输出的电压控制,用于开通和关断驱动电压产生模块的主供电电源,主供电电源输出通过取样电阻经A/D采样进入控制模块进行电压检测,用于监控主供电电源的输出;
流量信号调理模块与流量传感器电性连接,流量信号调理模块包括流量传感器的供电、电桥放大和调理电路,流量信号调理模块将流量传感器的流量信号调理成电压信号,经过A/D转换进入控制模块;
流量传感器安装在压电陶瓷驱动阀进气端的内壁,流量传感器是将流过压电陶瓷驱动阀的气体流量转化为电信号。
进一步的,通过驱动信号放大电路实现控制模块输出的D/A驱动信号放大,驱动信号放大电路N沟道场效应管Q205工作在可变电阻区,通过分压的方式,获得驱动信号;通过三极管Q207和三极管Q208构成的乙类互补对称功率放大电路,得到完整的驱动信号,避免输出波形的失真。
D/A输出控制信号经过IC203运算放大器,产生相同相位的放大信号,经过电阻R213,放大信号进入三极管Q203的基极,三极管Q203发射极和集电极逐渐导通,集电极电位降低,Q205栅极电压升高,漏极与源极之间的导通程度越深,导通程度越深Q205的源极电位越高,经过电阻R211反馈到IC203运算放大器的正相端,反馈的结果是运放IC203的输出电压降低,起到稳定运算放大器电压增益的作用。
甲乙类互补对称放大电路作为功放电路,采用一个电源的互补对称原理电路,由Q206组成前置放大级,Q207和Q208组成互补对称电路输出级。当D01输入信号时,Q207和Q208轮流导通,相互补充,在负载上得到完整的脉冲波,既避免了输出波形的严重失真,又提高了电路的效率。
进一步的,D/A输出的电压范围0-3V。
进一步的,用于压电式气体比例阀的控制系统的控制方法,包括以下步骤:
S1:控制模块采用NXP芯片作为处理器,利用流量信号调理模块输出电压和流量传感器采集气体流量建立BP神经网络模型;
S2:利用流量信号调理模块的输出电压和驱动电压产生模块的驱动电压产生模块的驱动电压建立无模型自适应控制模型;控制模块输出控制信号经D/A输出给驱动电压产生模块,实现流量控制。
进一步的,BP神经网络模型的建立包括以下步骤:
S11:采用高精度的气体流量阀控制输出气体流量,收集气体流量和流量信号调理模块的输出电压对应数据,将对应数据分为训练集和测试集;
S12:对S1中训练集和测试集数据进行归一化处理;
S13:输出电压为输入,气体流量为输出,利用训练集数据训练BP神经网络模型;
S14、调整BP学习算法的参数不断训练,建立稳定的神经网络模型,利用测试集验证神经网络模型的准确性。
进一步的,无模型自适应控制模型建立包括以下步骤:
S21:根据信号调理模块的输出电压和驱动电压建立辨识伪偏导数
S22:将系统输出的期望值
S23:计算得到驱动电压
S24:根据预测模型判断实际驱动电压输出是否达到期望输出,达到,循环结束;未达到,返回步骤S21。
本发明的有益效果:
1、精密气体流量阀要求气体流量大小可以按工艺要求由操作人员灵活设置且反应快速、控制精度高;
2、可按工艺要求,实现准确控制压电陶瓷驱动阀的驱动电压大小,达到控制阀体开合大小,进而精确控制输出气体流量比例,为流量精密控制技术提供新的技术装备;
3、驱动信号放大电路结构简单、小巧,便于系统集成。
附图说明
图1为本发明精密气体流量阀的控制系统架构图;
图2为本发明驱动电压产生模块的电路电路图;
图3为本发明气体流量和输出电压的BP神经网络模型流程图;
图4为本发明迭代253步网络均方误差图;
图5为本发明无模型自适应控制模型流程图。
具体实施方式
下面结合附图,对本发明的实施例作进一步的详细说明。
如图1,本发明一种用于精密气体流量阀的控制系统及方法,包括:直流电源模块、驱动电压产生模块、控制模块、流量信号调理模块、流量传感器,压电陶瓷驱动阀以电信号方式连接组成。
直流电源模块,由三路独立输出的电源组成,一路电源作为流量信号调理模块的供电电源;第二路电源为控制模块的供电电源,供电电压值为3.3V;第三路为驱动电压产生模块的主供电电源,驱动电压产生模块的主供电电源由整流单元和DC/DC单元组成,驱动电压产生模块采用NXP芯片作为处理器,使用芯片型号为MAX1771ESA,输出电压范围为0-300V可调;其中,DC/DC单元的控制信号由控制模块的D/A输出的0-3V的电压控制,以达到开通和关断驱动电压产生模块的主供电电源的目的,主供电电源输出通过取样电阻经A/D采样进入控制器进行电压检测,用于监控主供电电源的输出。
驱动电压产生模块由控制模块的D/A输出的0-3V的电压控制0-300V的电压输出,用于驱动压电陶瓷片,使陶瓷片产生形变来改变流量,驱动电压输出通过取样电阻经A/D采样进入控制模块进行电压检测,用于监控驱动电压的输出,并参与控制运算,驱动电压产生模块接收控制模块的控制信号产生相应的驱动电压给压电陶瓷驱动阀。
流量传感器采用MEMS传感器,流量信号调理模块包括传感器的供电和电桥放大和调理电路,将流量信号调理成1.5-3V之间的电压信号,经控制模块的A/D通过进入控制模块单片机芯片。
控制模块的MCU处理芯片型号为MF28Z512,实现驱动电压产生模块控制、参数设置和流量信号调理模块信号采集功能等,采用神经网络建模方式得到电压与流量之间的非线性模型,利用无模型自适应控制算法给定控制量,由D/A输出给驱动电压产生模块,实现流量控制。
如图2所示,驱动电压产生模块的电路,采用D/A放大驱动方案,将控制模块输出的D/A驱动信号放大,让N沟道场效应管Q205工作在可变电阻区,通过分压的方式,获得对应的驱动信号,在经过由三极管Q207和三极管Q208构成的乙类互补对称功率放大电路,得到了完整的驱动信号,避免了输出波形的失真。
如图3所示,输出电压与气体流量建模方法,其特征在于包括以下步骤:
S11:采用高精度的气体流量阀控制输出气体流量,记录当前流量大小和流量信号调理模块的输出电压,建立输出电压和流量数据训练集和测试集;
BP神经网络进行的建模,采用高精度的气体流量控制阀控制气体流量,记录当前流量大小和流量信号调理模块的输出电压,记录输出电压和流量数据。
S12:对电压和流量数据进行归一化处理;
从流量电压对应大的数据组中挑选对数据,先进行归一化处理。如表1所示,挑选的输入数据的样本集为Xin;输出数据样本集为Yout。
表1:
S13:输出电压为输入,流量大小为输出,利用训练集数据训练BP神经网络模型;
设计三层前向神经网络,输入层神经元个数为1,隐层神经元个数为7,输出层神经元个数为1,隐层和输出层都选取sigmoid函数为激励函数;
采用优化算法贝叶斯正则化对BP算法进行改进,Matlab中采用下面函数来训练神经网络;
其中,最大训练步数为6000,最大训练误差为1e
S14、调整BP学习算法的参数不断训练,建立稳定的神经网络模型,利用测试集验证神经网络模型的准确性;
训练结束,得到一组权系数[w1,b1,w2,b2],这组权系数就代表测量系统的相频特性模型,为了验证模型的精度,用实验数据中的另外6对测试数据进行仿真,这6对数据不同于训练时使用的数据,表2为仿真结果和实际测量值对比,测试结果与仿真结果。
表2:
测量过程中的在线补偿,神经网络训练得到的一组权系数[w1,b1,w2,b2]就代表着测量通道的电压流量模型,测量过程中,采集到每个流量值对应的电压大小后,根据电压大小进行归一化处理,然后代入神经网络前向计算公式,得到系统的输出,最后进行反归一化处理就得到预测的流量大小。
如图5所示,无模型自适应控制方法,包括以下步骤:
S21:根据信号调理模块的输出电压和驱动电压建立辨识伪偏导数
S22:将系统输出的期望值
S23:计算得到驱动电压
S24:根据预测模型判断实际驱动电压输出是否达到期望输出,达到,循环结束;未达到,返回步骤S21。
无模型自适应控制方法,其模型(2)由泛模型(1)的一步预测模型得来。
其中,
借助准则函数(3)来使得控制量的变化来受到限制,且克服系统的稳态误差。
其中
将(2)式代入准则函数(3)中,对
其中
为使伪偏导数的值变化的不是太快,设计如下的估计准则函数:
其中,
其中,
无模型自适应控制器包括两个重要的算法,一是伪偏导数的辨识,二是控制律的计算,因此,完整无模型自适应控制器为:
本发明系统可按工艺要求,由操作人员设置,实现准确控制压电陶瓷驱动阀的驱动电压大小,达到控制阀体开合大小,进而精确控制输出气体流量比例,为流量精密控制技术提供新的技术装备。
以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
- 一种用于精密气体流量阀的控制系统及方法
- 一种压电精密气体流量阀的复合控制系统及方法