一种3D模型全息投影系统
文献发布时间:2023-06-19 11:16:08
技术领域
本发明涉及三维成像技术领域,尤其涉及一种3D模型全息投影系统。
背景技术
全息投影技术属于3D技术的一种,原指利用干涉原理记录并再现物体真实的三维图像的技术,而后随着科幻电影与商业宣传的引导,全息投影的概念逐渐延伸到舞台表演、展览展示等商用活动中,但我们平时所了解到的全息往往并非严格意义上的全息投影,而是使用佩珀尔幻象、边缘消隐等方法实现3D效果的一种类全息投影技术。
现在已经开发出了很多全息投影系统,经过我们大量的检索与参考,发现现有的系统有如公开号为KR100659988B1,KR101620852B1和KR101417972B1所公开的系统,包括支架机构,所述支架机构上固定有电机,所述电机的转子连接有丝杆,所述丝杠上套接有螺母套,所述螺母套上固定有固定板,所述固定板的下表面还固定有支架,所述支架上固定有旋转舵机,所述旋转舵机的转头上固定有第一齿轮盘,所述固定板的下表面还设置有伸缩杆,所述伸缩杆的一端固定在所述固定板的下表面,另一端可转动地设置有第二齿轮盘,投影仪的上表面与所述第二齿轮盘的下表面相连接,所述第一齿轮盘通过皮带与所述第二齿轮盘相连接。但该系统在处理动态模型时会有失真,效果不够逼真。
发明内容
本发明的目的在于,针对所存在的不足,提出了一种3D模型全息投影系统,
为了克服现有技术的不足,本发明采用如下技术方案:
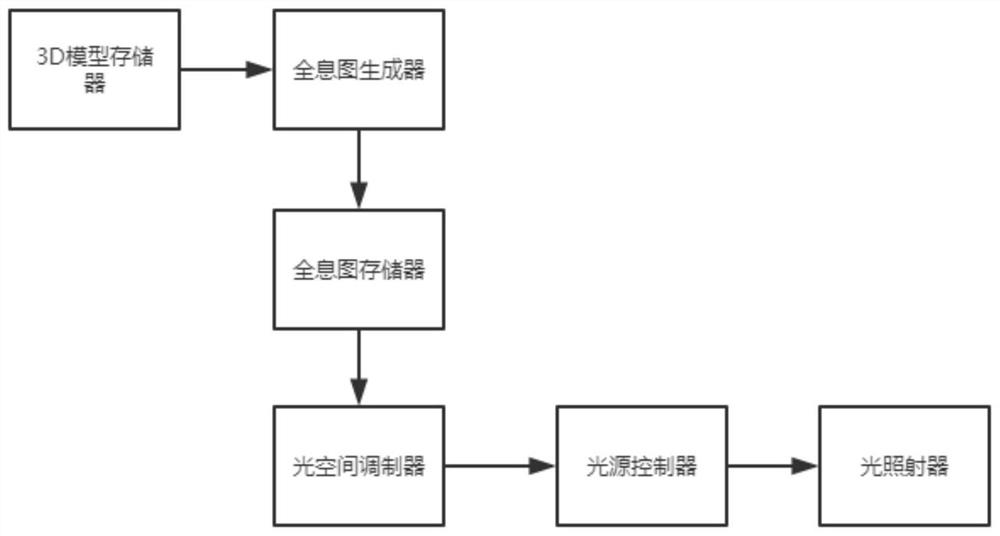
一种3D模型全息投影系统,包括光源控制器、光照射器、全息图生成器、3D模型存储器、光物理引擎、全息图存储器和光空间调制器,所述全息图生成器从所述3D模型存储器中获取3D模型,在光物理引擎照射处理下获得模型光波上各点的振幅和相位信息,并将光信息处理后生成得到全息图,所述全息图被保存至所述全息图存储器中,所述光空间调制器从所述全息图存储器中获取相应的全息图并解析后得到相关控制数据,所述光源控制器依据所述控制数据启动并控制所述光照射器,所述光照射器发出的光在相互作用下形成全息投影;
进一步的,所述3D模型存储器包括静态模型存储区域、动态模型存储区域和缓存区,3D模型通过所述缓存区与外界进行存取操作并根据分类保存在静态模型存储区域或动态模型存储区域;
进一步的,所述全息图生成器中设有两个虚拟光源和一个全息底片,所述虚拟光源分别照向3D模型和所述全息底片并在所述全息底片上形成干涉信息;
进一步的,所述全息图生成器通过改变所述虚拟光源和所述全息底片的位置形成六个互相垂直的方向的干涉信息并处理得到全息图;
进一步的,所述光空间调制器通过全息变换和相位量化将所述全息图处理得到多组相位子图;
进一步的,当需要投影的3D模型是动态模型时,所述全息图生成器对所述动态模型逐帧分拆获得多个静态模型,将其依次编号保存在所述全息生成器中的缓存区中,根据全息投影要求的帧率选择对应的静态模型处理得到全息图,所述空间调制器将所述全息图处理成相位子图,所述光源控制器根据变化的相位子图控制所述光照射器不断改变光线,形成动态的3D模型投影;
进一步的,所述全息变换为傅里叶变换、快速傅里叶变换、分数傅里叶变换、角频谱空间传播方法或波导变换;
进一步的,所述光照射器通过旋转安装件安装于展示台上,所述光源控制器通过控制所述旋转安装件能够使所述光照射器处于需要的角度方向。
本发明所取得的有益效果是:
本系统通过采用光物理引擎模拟光的物理原理对3D模型处理得到全息图,降低了外界因素造成的误差,使通过该全息图还原得到的全息投影更接近原始模型,同时对动态的3D模型采用合适的采帧提取,使还原的动态投影更加流畅逼真。
附图说明
从以下结合附图的描述可以进一步理解本发明。图中的部件不一定按比例绘制,而是将重点放在示出实施例的原理上。在不同的视图中,相同的附图标记指定对应的部分。
图1为模块结构示意图。
图2为3D模型X轴负方向的光强信息获取示意图。
图3为全息底片上某一点的干涉波形示意图。
图4为光照射器投影成像示意图。
图5为投影成像与3D模型原型的保真度示意图。
图6为旋转安装件结构示意图。
具体实施方式
为了使得本发明的目的.技术方案及优点更加清楚明白,以下结合其实施例,对本发明进行进一步详细说明;应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。对于本领域技术人员而言,在查阅以下详细描述之后,本实施例的其它系统.方法和/或特征将变得显而易见。旨在所有此类附加的系统.方法.特征和优点都包括在本说明书内.包括在本发明的范围内,并且受所附权利要求书的保护。在以下详细描述描述了所公开的实施例的另外的特征,并且这些特征根据以下将详细描述将是显而易见的。
本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或组件必须具有特定的方位,以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
实施例一。
一种3D模型全息投影系统,包括光源控制器、光照射器、全息图生成器、3D模型存储器、光物理引擎、全息图存储器和光空间调制器,所述全息图生成器从所述3D模型存储器中获取3D模型,在光物理引擎照射处理下获得模型光波上各点的振幅和相位信息,并将光信息处理后生成得到全息图,所述全息图被保存至所述全息图存储器中,所述光空间调制器从所述全息图存储器中获取相应的全息图并解析后得到相关控制数据,所述光源控制器依据所述控制数据启动并控制所述光照射器,所述光照射器发出的光在相互作用下形成全息投影;
所述3D模型存储器包括静态模型存储区域、动态模型存储区域和缓存区,3D模型通过所述缓存区与外界进行存取操作并根据分类保存在静态模型存储区域或动态模型存储区域;
所述全息图生成器中设有两个虚拟光源和一个全息底片,所述虚拟光源分别照向3D模型和所述全息底片并在所述全息底片上形成干涉信息;
所述全息图生成器通过改变所述虚拟光源和所述全息底片的位置形成六个互相垂直的方向的干涉信息并处理得到全息图;
所述光空间调制器通过全息变换和相位量化将所述全息图处理得到多组相位子图;
当需要投影的3D模型是动态模型时,所述全息图生成器对所述动态模型逐帧分拆获得多个静态模型,将其依次编号保存在所述全息生成器中的缓存区中,根据全息投影要求的帧率选择对应的静态模型处理得到全息图,所述空间调制器将所述全息图处理成相位子图,所述光源控制器根据变化的相位子图控制所述光照射器不断改变光线,形成动态的3D模型投影;
所述全息变换为傅里叶变换、快速傅里叶变换、分数傅里叶变换、角频谱空间传播方法或波导变换;
所述光照射器通过旋转安装件安装于展示台上,所述光源控制器通过控制所述旋转安装件能够使所述光照射器处于需要的角度方向。
实施例二。
一种3D模型全息投影系统,包括光源控制器、光照射器、全息图生成器、3D模型存储器、光物理引擎、全息图存储器和光空间调制器,所述全息图生成器从所述3D模型存储器中获取3D模型,在光物理引擎照射处理下获得模型光波上各点的振幅和相位信息,并将光信息处理后生成得到全息图,所述全息图被保存至所述全息图存储器中,所述光空间调制器从所述全息图存储器中获取相应的全息图并解析后得到相关控制数据,所述光源控制器依据所述控制数据启动并控制所述光照射器,所述光照射器发出的光在相互作用下形成全息投影;
所述3D模型存储器包括静态模型存储区域、动态模型存储区域和缓存区,3D模型通过所述缓存区与外界进行存取操作并根据分类保存在静态模型存储区域或动态模型存储区域;
所述全息图生成器中设有两个虚拟光源和一个全息底片,所述虚拟光源分别照向3D模型和所述全息底片并在所述全息底片上形成干涉信息;
所述全息图生成器通过改变所述虚拟光源和所述全息底片的位置形成六个互相垂直的方向的干涉信息并处理得到全息图;
所述光空间调制器通过全息变换和相位量化将所述全息图处理得到多组相位子图;
当需要投影的3D模型是动态模型时,所述全息图生成器对所述动态模型逐帧分拆获得多个静态模型,将其依次编号保存在所述全息生成器中的缓存区中,根据全息投影要求的帧率选择对应的静态模型处理得到全息图,所述空间调制器将所述全息图处理成相位子图,所述光源控制器根据变化的相位子图控制所述光照射器不断改变光线,形成动态的3D模型投影;
所述全息变换为傅里叶变换、快速傅里叶变换、分数傅里叶变换、角频谱空间传播方法或波导变换;
所述光照射器通过旋转安装件安装于展示台上,所述光源控制器通过控制所述旋转安装件能够使所述光照射器处于需要的角度方向;
基于此设计了一种3D模型全息投影系统,包括光源控制器、光照射器、全息图生成器、3D模型存储器、光物理引擎、全息图存储器和光空间调制器,所述全息图生成器从所述3D模型存储器中获取3D模型,在光物理引擎照射处理下获得模型光波上各点的振幅和相位信息,并将光信息处理后生成得到全息图,所述全息图被保存至所述全息图存储器中,所述光空间调制器从所述全息图存储器中获取相应的全息图并解析后得到相关控制数据,所述光源控制器依据所述控制数据启动并控制所述光照射器,所述光照射器发出的光在相互作用下形成全息投影;
所述3D模型存储器上包括两个存储区域,一个为静态模型的存储区域,记为S区,另一个为动态模型的存储区域,记为M区,所述3D模型存储器上还设有缓存区和输入输出接口,所述输入输出接口用于连接外部设备或是所述全息图生成器,当所述输入输出接口连接外部设备时,外部设备上的3D模型先传送至所述缓存区,所述缓存区对接收的3D模型进行类型判断,再将其传送至对应的S区或是M区,所述投影系统还包括人机交互界面,所述人机交互界面与所述全息图生成器连接,当所述3D模型存储器的输入输出接口连接所述全息图生成器时,所述人机交互界面上显示所有的3D模型,通过在所述人机交互界面上操作选择其中一个3D模型发送至所述全息图生成器;
所述光物理引擎内置于所述全息图生成器中,利用软件真实的模拟光的传输及干涉衍射作用;
所述全息图生成器中设有两个虚拟光源和一个全息底片,所述虚拟光源的频率和振幅相同,其中一个虚拟光源照射在所述3D模型上产生漫反射,另一个虚拟光源直接照射在所述全息底片上,和漫反射的光束产生干涉,把漫反射光波上各点的位相和振幅转换成在空间上变化的强度,从而利用干涉条纹间的反差和间隔将漫反射光波的全部信息记录下来,改变虚拟光源和全息底片的位置,分别从不同的方向记录从3D模型漫反射光波的信息;
以3D模型的重心为圆点建立空间直角坐标系O(X-Y-Z),将两个所述虚拟光源分别以X轴正方向照向3D模型形成的α光束和以X轴负方向照向全息底片形成的β光束,照向3D模型后漫反射的光束为γ光束,所述γ光束返回至所述全息底片与所述β光束产生干涉,由于3D模型表面凹凸不平,在全息底片上各个点的光强不同,进而可以通过光强对3D模型的X轴正方向表面进行表述,改变虚拟光源和全息底片的位置,按上述同样的方法可以获得3D模型X轴负方向表面的光强信息、3D模型Y轴轴方向表面的光强信息、3D模型Y轴负方向表面的光强信息、3D模型Z轴正方向表面的光强信息和3D模型Z轴负方向表面的光强信息,所述全息图生成器对所述6个方向的光强信息进行显影、定影处理后得到全息图,所述全息图被传送并保存至所述全息图存储器中;
所述光空间调制器从所述全息图存储器中获取相应的全息图并通过将所述全息图进行全息变换得到全息相位图,所述全息变换为傅里叶变换、快速傅里叶变换、分数傅里叶变换、角频谱空间传播方法或波导变换,将所述全息相位图进行相位量化,得到全息相位量化图,将所述相位量化图分解成多组相位子图,所述光源控制器根据每组相位子图的数据分别控制多组光照射器发出光线,所述光线在交汇处形成3D模型的投影图像,所述光照射器和所述相位子图的数量相同;
当所述3D模型为动态模型时,所述全息图生成器对所述动态模型逐帧分拆获得多个静态模型,将其依次编号保存在所述全息生成器中的缓存区中,根据全息投影要求的帧率选择对应的静态模型处理得到全息图,所述空间调制器将所述全息图处理成相位子图,所述光源控制器根据变化的相位子图控制所述光照射器不断改变光线,形成动态的3D模型投影。
实施例三。
一种3D模型全息投影系统,包括光源控制器、光照射器、全息图生成器、3D模型存储器、光物理引擎、全息图存储器和光空间调制器,所述全息图生成器从所述3D模型存储器中获取3D模型,在光物理引擎照射处理下获得模型光波上各点的振幅和相位信息,并将光信息处理后生成得到全息图,所述全息图被保存至所述全息图存储器中,所述光空间调制器从所述全息图存储器中获取相应的全息图并解析后得到相关控制数据,所述光源控制器依据所述控制数据启动并控制所述光照射器,所述光照射器发出的光在相互作用下形成全息投影;
所述3D模型存储器包括静态模型存储区域、动态模型存储区域和缓存区,3D模型通过所述缓存区与外界进行存取操作并根据分类保存在静态模型存储区域或动态模型存储区域;
所述全息图生成器中设有两个虚拟光源和一个全息底片,所述虚拟光源分别照向3D模型和所述全息底片并在所述全息底片上形成干涉信息;
所述全息图生成器通过改变所述虚拟光源和所述全息底片的位置形成六个互相垂直的方向的干涉信息并处理得到全息图;
所述光空间调制器通过全息变换和相位量化将所述全息图处理得到多组相位子图;
当需要投影的3D模型是动态模型时,所述全息图生成器对所述动态模型逐帧分拆获得多个静态模型,将其依次编号保存在所述全息生成器中的缓存区中,根据全息投影要求的帧率选择对应的静态模型处理得到全息图,所述空间调制器将所述全息图处理成相位子图,所述光源控制器根据变化的相位子图控制所述光照射器不断改变光线,形成动态的3D模型投影;
所述全息变换为傅里叶变换、快速傅里叶变换、分数傅里叶变换、角频谱空间传播方法或波导变换;
所述光照射器通过旋转安装件安装于展示台上,所述光源控制器通过控制所述旋转安装件能够使所述光照射器处于需要的角度方向;
基于此设计了一种3D模型全息投影系统,包括光源控制器、光照射器、全息图生成器、3D模型存储器、光物理引擎、全息图存储器和光空间调制器,所述全息图生成器从所述3D模型存储器中获取3D模型,在光物理引擎照射处理下获得模型光波上各点的振幅和相位信息,并将光信息处理后生成得到全息图,所述全息图被保存至所述全息图存储器中,所述光空间调制器从所述全息图存储器中获取相应的全息图并解析后得到相关控制数据,所述光源控制器依据所述控制数据启动并控制所述光照射器,所述光照射器发出的光在相互作用下形成全息投影;
所述3D模型存储器上包括两个存储区域,一个为静态模型的存储区域,记为S区,另一个为动态模型的存储区域,记为M区,所述3D模型存储器上还设有缓存区和输入输出接口,所述输入输出接口用于连接外部设备或是所述全息图生成器,当所述输入输出接口连接外部设备时,外部设备上的3D模型先传送至所述缓存区,所述缓存区对接收的3D模型进行类型判断,再将其传送至对应的S区或是M区,所述投影系统还包括人机交互界面,所述人机交互界面与所述全息图生成器连接,当所述3D模型存储器的输入输出接口连接所述全息图生成器时,所述人机交互界面上显示所有的3D模型,通过在所述人机交互界面上操作选择其中一个3D模型发送至所述全息图生成器;
所述光物理引擎内置于所述全息图生成器中,利用软件真实的模拟光的传输及干涉衍射作用;
所述全息图生成器中设有两个虚拟光源和一个全息底片,所述虚拟光源的频率和振幅相同,其中一个虚拟光源照射在所述3D模型上产生漫反射,另一个虚拟光源直接照射在所述全息底片上,和漫反射的光束产生干涉,把漫反射光波上各点的位相和振幅转换成在空间上变化的强度,从而利用干涉条纹间的反差和间隔将漫反射光波的全部信息记录下来,改变虚拟光源和全息底片的位置,分别从不同的方向记录从3D模型漫反射光波的信息;
以3D模型的重心为圆点建立空间直角坐标系O(X-Y-Z),将两个所述虚拟光源分别以X轴正方向照向3D模型形成的α光束和以X轴负方向照向全息底片形成的β光束,照向3D模型后漫反射的光束为γ光束,所述γ光束返回至所述全息底片与所述β光束产生干涉,由于3D模型表面凹凸不平,在全息底片上各个点的光强不同,进而可以通过光强对3D模型的X轴正方向表面进行表述,改变虚拟光源和全息底片的位置,按上述同样的方法可以获得3D模型X轴负方向表面的光强信息、3D模型Y轴轴方向表面的光强信息、3D模型Y轴负方向表面的光强信息、3D模型Z轴正方向表面的光强信息和3D模型Z轴负方向表面的光强信息,所述全息图生成器对所述6个方向的光强信息进行显影、定影处理后得到全息图,所述全息图被传送并保存至所述全息图存储器中;
所述光空间调制器从所述全息图存储器中获取相应的全息图并通过将所述全息图进行全息变换得到全息相位图,所述全息变换为傅里叶变换、快速傅里叶变换、分数傅里叶变换、角频谱空间传播方法或波导变换,将所述全息相位图进行相位量化,得到全息相位量化图,将所述相位量化图分解成多组相位子图,所述光源控制器根据每组相位子图的数据分别控制多组光照射器发出光线,所述光线在交汇处形成3D模型的投影图像,所述光照射器和所述相位子图的数量相同;
当所述3D模型为动态模型时,所述全息图生成器对所述动态模型逐帧分拆获得多个静态模型,将其依次编号保存在所述全息生成器中的缓存区中,根据全息投影要求的帧率选择对应的静态模型处理得到全息图,所述空间调制器将所述全息图处理成相位子图,所述光源控制器根据变化的相位子图控制所述光照射器不断改变光线,形成动态的3D模型投影;
所述动态模型的原始帧率为m帧/秒,时长为t秒,所述全息图生成器中的缓存区能够存储的静态模型为k帧,首先分解动态模型的第1帧至第k帧保存在所述缓存区中,当第1帧至第
目标3D模型的全息投影的帧率为n帧/秒,当m=n时,缓存中的每一帧静态模型都将被生成全息图,当m>2n时,选择每秒内的第
实施例四。
一种3D模型全息投影系统,包括光源控制器、光照射器、全息图生成器、3D模型存储器、光物理引擎、全息图存储器和光空间调制器,所述全息图生成器从所述3D模型存储器中获取3D模型,在光物理引擎照射处理下获得模型光波上各点的振幅和相位信息,并将光信息处理后生成得到全息图,所述全息图被保存至所述全息图存储器中,所述光空间调制器从所述全息图存储器中获取相应的全息图并解析后得到相关控制数据,所述光源控制器依据所述控制数据启动并控制所述光照射器,所述光照射器发出的光在相互作用下形成全息投影;
所述3D模型存储器包括静态模型存储区域、动态模型存储区域和缓存区,3D模型通过所述缓存区与外界进行存取操作并根据分类保存在静态模型存储区域或动态模型存储区域;
所述全息图生成器中设有两个虚拟光源和一个全息底片,所述虚拟光源分别照向3D模型和所述全息底片并在所述全息底片上形成干涉信息;
所述全息图生成器通过改变所述虚拟光源和所述全息底片的位置形成六个互相垂直的方向的干涉信息并处理得到全息图;
所述光空间调制器通过全息变换和相位量化将所述全息图处理得到多组相位子图;
当需要投影的3D模型是动态模型时,所述全息图生成器对所述动态模型逐帧分拆获得多个静态模型,将其依次编号保存在所述全息生成器中的缓存区中,根据全息投影要求的帧率选择对应的静态模型处理得到全息图,所述空间调制器将所述全息图处理成相位子图,所述光源控制器根据变化的相位子图控制所述光照射器不断改变光线,形成动态的3D模型投影;
所述全息变换为傅里叶变换、快速傅里叶变换、分数傅里叶变换、角频谱空间传播方法或波导变换;
所述光照射器通过旋转安装件安装于展示台上,所述光源控制器通过控制所述旋转安装件能够使所述光照射器处于需要的角度方向;
基于此设计了一种3D模型全息投影系统,包括光源控制器、光照射器、全息图生成器、3D模型存储器、光物理引擎、全息图存储器和光空间调制器,所述全息图生成器从所述3D模型存储器中获取3D模型,在光物理引擎照射处理下获得模型光波上各点的振幅和相位信息,并将光信息处理后生成得到全息图,所述全息图被保存至所述全息图存储器中,所述光空间调制器从所述全息图存储器中获取相应的全息图并解析后得到相关控制数据,所述光源控制器依据所述控制数据启动并控制所述光照射器,所述光照射器发出的光在相互作用下形成全息投影;
所述3D模型存储器上包括两个存储区域,一个为静态模型的存储区域,记为S区,另一个为动态模型的存储区域,记为M区,所述3D模型存储器上还设有缓存区和输入输出接口,所述输入输出接口用于连接外部设备或是所述全息图生成器,当所述输入输出接口连接外部设备时,外部设备上的3D模型先传送至所述缓存区,所述缓存区对接收的3D模型进行类型判断,再将其传送至对应的S区或是M区,所述投影系统还包括人机交互界面,所述人机交互界面与所述全息图生成器连接,当所述3D模型存储器的输入输出接口连接所述全息图生成器时,所述人机交互界面上显示所有的3D模型,通过在所述人机交互界面上操作选择其中一个3D模型发送至所述全息图生成器;
所述光物理引擎内置于所述全息图生成器中,利用软件真实的模拟光的传输及干涉衍射作用;
所述全息图生成器中设有两个虚拟光源和一个全息底片,所述虚拟光源的频率和振幅相同,其中一个虚拟光源照射在所述3D模型上产生漫反射,另一个虚拟光源直接照射在所述全息底片上,和漫反射的光束产生干涉,把漫反射光波上各点的位相和振幅转换成在空间上变化的强度,从而利用干涉条纹间的反差和间隔将漫反射光波的全部信息记录下来,改变虚拟光源和全息底片的位置,分别从不同的方向记录从3D模型漫反射光波的信息;
以3D模型的重心为圆点建立空间直角坐标系O(X-Y-Z),将两个所述虚拟光源分别以X轴正方向照向3D模型形成的α光束和以X轴负方向照向全息底片形成的β光束,照向3D模型后漫反射的光束为γ光束,所述γ光束返回至所述全息底片与所述β光束产生干涉,由于3D模型表面凹凸不平,在全息底片上各个点的光强不同,进而可以通过光强对3D模型的X轴正方向表面进行表述,改变虚拟光源和全息底片的位置,按上述同样的方法可以获得3D模型X轴负方向表面的光强信息、3D模型Y轴轴方向表面的光强信息、3D模型Y轴负方向表面的光强信息、3D模型Z轴正方向表面的光强信息和3D模型Z轴负方向表面的光强信息,所述全息图生成器对所述6个方向的光强信息进行显影、定影处理后得到全息图,所述全息图被传送并保存至所述全息图存储器中;
所述光空间调制器从所述全息图存储器中获取相应的全息图并通过将所述全息图进行全息变换得到全息相位图,所述全息变换为傅里叶变换、快速傅里叶变换、分数傅里叶变换、角频谱空间传播方法或波导变换,将所述全息相位图进行相位量化,得到全息相位量化图,将所述相位量化图分解成多组相位子图,所述光源控制器根据每组相位子图的数据分别控制多组光照射器发出光线,所述光线在交汇处形成3D模型的投影图像,所述光照射器和所述相位子图的数量相同;
当所述3D模型为动态模型时,所述全息图生成器对所述动态模型逐帧分拆获得多个静态模型,将其依次编号保存在所述全息生成器中的缓存区中,根据全息投影要求的帧率选择对应的静态模型处理得到全息图,所述空间调制器将所述全息图处理成相位子图,所述光源控制器根据变化的相位子图控制所述光照射器不断改变光线,形成动态的3D模型投影;
所述动态模型的原始帧率为m帧/秒,时长为t秒,所述全息图生成器中的缓存区能够存储的静态模型为k帧,首先分解动态模型的第1帧至第k帧保存在所述缓存区中,当第1帧至第
目标3D模型的全息投影的帧率为n帧/秒,当m=n时,缓存中的每一帧静态模型都将被生成全息图,当m>2n时,选择每秒内的第
所述光照射器内部设有多个激光发射器,所述光照射器的照射面上设有光栅,所述光栅能够受所述光源控制器的控制而变化,每个激光发射器发射的激光波长均受所述光源控制器控制;
所述光照射器通过旋转安装件安装于展示台上,所述展示台上设有三个光照射器,所述光照射器的连线成正三角形,所述旋转安装件包括旋转机构和旋转支撑架,所述旋转机构为圆形结构设置连接于所述展示台上,所述旋转支撑架底端与旋转机构上端嵌合连接,所述光照射器活动设置于所述所述转支撑架上端内部,所述旋转机构包括底座和旋转盘,所述旋转盘通过一轴承枢组于所述底座顶部可横置向旋转,所述底座内部为中空结构并内设一致动装置,所述致动装置顶端设有一驱动轴杆,所述旋转盘底部设有一导磁定位部,所述导磁定位部向下凸伸入所述底座内部的中空结构并位于所述致动装置的外围间隔处,所述导磁定位部能随所述旋转盘一起转动,所述导磁定位部下方设有一电控磁吸部,所述电控磁吸部通过通电产生磁力以吸附所述导磁定位部连同旋转盘,所述旋转支撑架之间设有旋转杆,所述旋转杆贯穿并固定连接于所述光照射器,所述旋转杆的两端设有限位片用于限制所述旋转杆的旋转角度,所述光照射器能随所述旋转杆在竖直平面内转动,通过所述旋转盘与所述旋转杆的转动能使所述光照射器在所述光源控制器的控制下处于需要的角度状态。
虽然上面已经参考各种实施例描述了本发明,但是应当理解,在不脱离本发明的范围的情况下,可以进行许多改变和修改。也就是说上面讨论的方法,系统和设备是示例。各种配置可以适当地省略,替换或添加各种过程或组件。例如,在替代配置中,可以以与所描述的顺序不同的顺序执行方法,和/或可以添加,省略和/或组合各种部件。而且,关于某些配置描述的特征可以以各种其他配置组合,如可以以类似的方式组合配置的不同方面和元素。此外,随着技术发展其中的元素可以更新,即许多元素是示例,并不限制本公开或权利要求的范围。
在说明书中给出了具体细节以提供对包括实现的示例性配置的透彻理解。然而,可以在没有这些具体细节的情况下实践配置例如,已经示出了众所周知的电路,过程,算法,结构和技术而没有不必要的细节,以避免模糊配置。该描述仅提供示例配置,并且不限制权利要求的范围,适用性或配置。相反,前面对配置的描述将为本领域技术人员提供用于实现所描述的技术的使能描述。在不脱离本公开的精神或范围的情况下,可以对元件的功能和布置进行各种改变。
综上,其旨在上述详细描述被认为是例示性的而非限制性的,并且应当理解,以上这些实施例应理解为仅用于说明本发明而不用于限制本发明的保护范围。在阅读了本发明的记载的内容之后,技术人员可以对本发明作各种改动或修改,这些等效变化和修饰同样落入本发明权利要求所限定的范围。
- 一种3D模型全息投影系统
- 一种体全息投影屏及其制作方法、体全息投影系统