一种巡检机器人的辅助爬升方法及其结构
文献发布时间:2023-06-19 11:17:41
技术领域
本申请涉及巡检机器人爬升领域,具体涉及一种巡检机器人的辅助爬升方法及其结构。
背景技术
目前在各工业领域,为了节约人力劳动成本,很多工作逐渐由机器人替代。
化工等领域的巡检工作多采用轨道式巡检机器人,例如在化工厂中,为了保证生产运作安全,需要对工厂环境的温度、设备状态和空气等等数据进行实时监测,而人工监测存在一定的安全隐患,还有繁琐的检测流程造成人力资源的浪费,通过铺设轨道使用机器人来进行巡检可以大大降低人力资源成本,减小事故发生率,即通过轨道机器人在轨道上的来回移动实现对巡检点的巡检任务,因此保持轨道机器人与轨道之间的稳定性非常重要。但由于运行轨道中往往存在斜坡位置,轨道机器人在斜坡处运动时,若坡道的倾斜程度大到一定程度时候易发生上坡困难的问题,甚至可能因为发生倾覆而脱离轨道。因此,保障轨道机器人在爬坡时在轨道上的稳定性和提升轨道机器人的爬坡能力是非常重要的。
发明内容
本申请公开了一种巡检机器人的辅助爬升方法,解决了轨道机器人在爬坡时易倾覆和爬坡困难的问题。
为了解决以上问题,本申请采用以下技术方案:
(a)轨道机器人通过固定在其底部的行走滚轮移动,由内置于轨道机器人的水平传感器检测机器人是否处于水平状态;
(b)当水平传感器检测到轨道机器人处于非水平状态,控制模块接收到检测结果,轨道机器人停止前进,控制模块控制可伸缩机械抓钩伸出;
(c)在轨道机器人的视觉系统的辅助下,可伸缩机械抓钩抓住行进前方离轨道机器人最近的一个位于轨道中央的圆形插孔;
(d)轨道机器人开始前进,前进的同时可伸缩机械抓钩回缩;
(e)可伸缩机械抓钩回缩完毕后可伸缩机械抓钩松开圆形插孔,返回步骤(a),直到巡检完毕。
优选地,行走滚轮材质为橡胶。
优选地,圆形插孔沿轨道延展方向均匀分布。
优选地,可伸缩机械抓钩的材质为金属。
优选地,相邻两个圆形插孔的间距为1m。
本申请还公开了一种巡检机器人的辅助爬升结构,应用于上述的一种巡检机器人的辅助爬升方法,包括轨道和与轨道嵌合的轨道机器人,轨道机器人包括视觉系统,轨道机器人底部的左右两侧各安装有2个行走滚轮,每侧的2个行走滚轮前后对称,行走滚轮嵌在轨道两侧的凹槽,行走滚轮通过行走滚轮架固定在轨道机器人底部,轨道机器人底部的前端中央安装有一个可伸缩机械抓钩,机器人内部设置有控制模块和水平传感器,视觉系统、可伸缩机械抓钩和水平传感器均连接至控制模块;轨道的中央沿轨道延展方向设置有多个圆形插孔,可伸缩机械抓钩的最大可伸长度大于两个相邻的圆形插孔的距离的最大值。
优选地,行走滚轮材质为橡胶。
优选地,圆形插孔沿轨道延展方向均匀分布。
优选地,可伸缩机械抓钩的材质为金属。
优选地,相邻两个圆形插孔的间距为1m。
本申请通过位于轨道上的圆形插孔和轨道机器人的可伸缩机械抓钩的配合,使得轨道机器人在攀爬坡道时候除了自身内置驱动提供的动力还可以通过可伸缩机械抓钩获取牵引力,保障轨道机器人爬坡时候的稳定性,防止因为上升力不足而倾覆脱离轨道;行走滚轮材质优选橡胶增大了滚轮与轨道间的摩擦力,进一步提升攀爬稳定性;可伸缩机械抓钩的材质采用金属保障其牢固性,防止在使用中断裂。
附图说明
图1为本申请工作流程示意图;
图2为本申请轨道的俯视示意图;
图3为本申请行走滚轮的结构示意图;
图4为实施例1的可伸缩机械抓钩结构示意图;
图5为本申请模块连接示意图;
其中,1-凹槽,2-圆形插孔,3-行走滚轮架,4-行走滚轮。
具体实施方式
本申请公开了一种巡检机器人的辅助爬升方法及其结构,其中,巡检机器人的辅助爬升结构包括轨道和与轨道嵌合的轨道机器人,轨道机器人包括视觉系统,视觉系统用于辅助配合机器人进行图像和环境的识别,方便进行抓取等动作。轨道机器人底部的左右两侧各安装有2个行走滚轮4,每侧的2个行走滚轮4前后对称,轨道如图2所示,行走滚轮4嵌在轨道两侧的凹槽1,行走滚轮4通过行走滚轮架3定在轨道机器人底部,为了增大轨道机器人与轨道间的摩擦力,行走滚轮4材质优选为橡胶。轨道机器人底部的前端中央安装有一个可伸缩机械抓钩,机器人内部设置有控制模块和水平传感器,水平传感器用于检测轨道机器人的行走状态,判断其处于水平轨道还是坡道;如图5所示,视觉系统、可伸缩机械抓钩和水平传感器均连接至控制模块.
轨道的中央沿轨道延展方向设置有多个圆形插孔2,在运行中供轨道机器人上的可伸缩机械抓钩抓住,可伸缩机械抓钩的最大可伸长度大于两个相邻的圆形插孔2的距离的最大值,以保证轨道机器人能够抓住前进方向上距离轨道机器人最近的一个圆形插孔2。圆形插孔2沿轨道延展方向均匀分布,相邻两个圆形插孔2的间距为1m,可伸缩机械抓钩的材质可以选为金属,以保证可伸缩机械抓钩的牢固性,保证其不会因为受力过大而断裂。
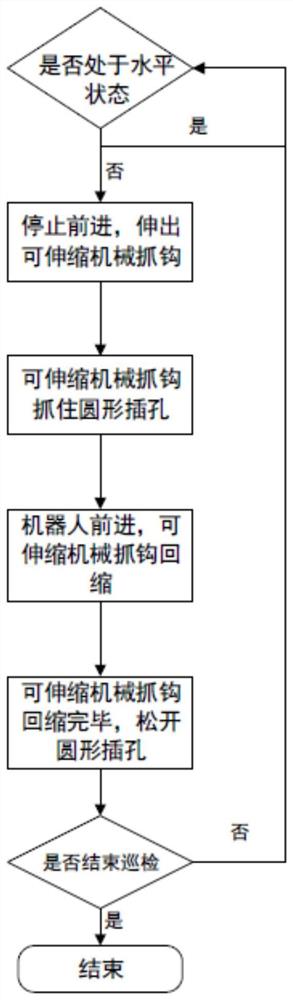
本申请公开的一种巡检机器人的辅助爬升方法,其流程图如图1所示,主要包括以下步骤:
(a)轨道机器人通过固定在其底部的行走滚轮4移动,由内置于轨道机器人的水平传感器检测机器人是否处于水平状态,由于行走时测量误差的存在,可设置一个阈值,当水平传感器探测到的角度大于该阈值咋判断轨道机器人处于爬坡状态;
(b)当水平传感器检测到轨道机器人处于非水平状态,控制模块接收到检测结果,轨道机器人停止前进,控制模块控制可伸缩机械抓钩伸出;
(c)在轨道机器人的视觉系统的辅助下,可伸缩机械抓钩抓住行进前方离轨道机器人最近的一个位于轨道中央的圆形插孔2,其中,视觉系统负责辅助识别圆形插孔2位置;
(d)轨道机器人开始前进,前进的同时可伸缩机械抓钩回缩;
(e)可伸缩机械抓钩回缩完毕后可伸缩机械抓钩松开圆形插孔2,返回步骤(a),直到巡检完毕。
实施例1
本实施例以化工领域巡检机器人为例说明本申请工作原理:
化工巡检机器人应用于化工厂,需要对化工厂的环境进行实时监测,如化工厂温度、气体成分和仪器运作状况进行检测,化工巡检机器人代替人工检查更为安全和便捷。在化工厂内铺设巡检用的轨道,覆盖所需检测点,轨道机器人嵌合在轨道上沿着轨道前进,根据预设的指令在特定地点停止运行进行对应项目检查分析。轨道机器人底部的左右两侧各安装有2个行走滚轮4,每侧的2个行走滚轮4前后对称,行走滚轮4通过3固定在轨道机器人底部。可伸缩机械抓钩可采用本领域常用的折叠式抓钩,其结构图如图4所示,也可采用其他具有伸缩功能的机械臂进行抓取。
在轨道机器人前进过程中,进入一个循环工作状态,其循环过程如下:
内置的水平传感器实时对轨道机器人的水平状态进行检测,并将检测结果传输给控制模块,当水平传感器探测到轨道机器人倾斜度大于预设阈值时,系统判定轨道机器人处于爬坡状态,控制模块发出指令让轨道机器人停止前进,位于轨道机器人底部的可伸缩机械抓钩伸出,可伸缩抓钩的控制可采用本领域常用方法实现,有视觉系统根据内置算法寻找前进方向距离机器人本体最近的一个位于轨道中央的圆形插孔2,可伸缩机械抓钩抓住圆形插孔2后,控制模块再次控制轨道机器人前进,前进的同时轨道机器人的可伸缩机械抓钩回缩,回缩完毕后可伸缩机械抓钩松开圆形插孔2,此时回到循环工作状态的第一步,即由水平传感器检测轨道机器人的状态。巡检完毕以后跳出循环,轨道机器人停止工作。
- 一种巡检机器人的辅助爬升方法及其结构
- 一种隧道结构全自动智能巡检机器人及巡检方法