危险环境中条形自主救援车路径信息压缩传输方法
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及信息压缩传输方法,具体涉及一种应用在复杂危险环境中条形救援小车的路径信息压缩传输方法。
背景技术
自动导向车(Automated Guided Vehicle,简称AGV),也称为自动导向搬运车或自动引导搬运车。近些年随着人工智能技术的发展,AGV向着智能化和自主化方向发展。现今AGV的开发集人工智能、信息处理、图像处理为一体,涉及计算机、自动控制、信息通讯、机械设计和电子技术等多个学科,已成为研究热点。
自主救援车是AGV的一个重要应用。自主救援车常用于地震灾害、矿井坍塌、建筑物倒塌或核设施泄露等危险复杂场所的救援工作。为运送更多救援物资或穿越狭窄通道实施救援,自主救援车通常被设计为条形。救援车的路径规划算法是救援小车重要的研究内容之一。其设计目标是:路径规划算法可以控制条形救援车根据自身外形、位置信息和周围障碍物信息,以旋转避障、穿越狭窄通道的方式完成从出发点到目标点的行进且路径最优(通常指路径距离最短)。条形救援车的路径规划方法不同于普通的路径规划方法。普通规划方法目标是提供一条安全避碰的最优路线,不考虑运动对象自身的外部形态;条形救援车的规划方法需要考虑救援车外形特征,除了完成最优路线规划外还要对机器人的姿态进行控制,如选择旋转时机以躲避障碍物或是否可以穿越狭窄通道等。为了救援车正确的执行所规划的路径和姿态控制信息,表达规划路劲信息的数据结构尤为重要。
发明内容
本发明的目的是:设计一种危险环境中条形自主救援车路径信息压缩传输方法,该路径信息压缩传输方法减少存储负担、提高传输效率。
本发明的技术解决方案是:基于路径规划方法中最常用的栅格法环境建模,通过现有路径规划方法计算出最优路径;所述的现有路径规划方法的申请号为“201810143863.2”名称为“基于自学习蚁群算法的条形机器人路径规划方法”;该路径信息压缩传输方法的步骤如下:
步骤1、基于栅格法完成环境建模:中央控制模块以真实工作空间图片信息为依据,建立一个X行Y列的栅格地图,栅格地图左上角被作为原点坐标,生成栅格地图密度为X×Y,其中单元格边长依据机器人外形大小与真实工作空间的比例设计;栅格地图中障碍物区域的单元格被标记为“0”,称为“障碍物单元格”;可行区域单元格被标记为“1”称为“可行单元格”;标记出发点位置S和目标点位置D;
步骤2、为救援车规划路径:中央控制模块通过现有路径规划方法,计算出最优路径,最优路径的存储信息包含救援车坐标和救援车姿态信息;考虑到救援车为条形,因此栅格地图中由两个单元格表示,称为头单元格和尾单元格;头单元格坐标作为整个救援车坐标;每条路径信息存储数据结构为一个广义表:
P
其中:x∈{1,2,...,X};y∈{1,2,...,Y};θ∈{1,2,3,4}
其中:P
步骤3、最优路径压缩:在最优路径传输到救援车之前,中央控制模块完成压缩计算,压缩公式如下:
η
其中:η
步骤4、中央控制模块将压缩后的路径传输给机器人;需要传输的压缩路径表示如下:
步骤5、机器人解压缩:机器人获得规划路径
其中:符号“%”表示取模运算;符号
步骤6:机器人执行解压缩后的路径P
本发明由于采取以上技术方案,其具有以下优点:
(1)压缩效率高。本方法是通过公式将由横坐标、纵坐标、姿态构成的三值信息广义表(最优路径)规划路径压缩为由单整数作为元素的线性表规划径路,可以节省存储空间2/3。
(2)缩短路径信息传输时间。由于路径信息压缩以后占用存储空间变小,因此可以较大幅度提高路径传输的速度。
(3)计算简单。算法的压缩公式和解压缩公式均比较简单,压缩和解压缩计算不会给系统造成太多计算压力。
附图说明
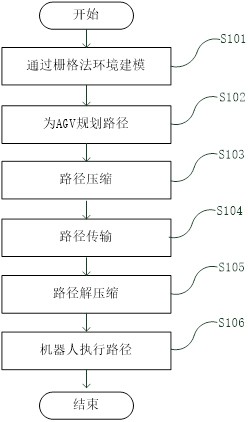
图1是本发明方法的执行过程;
图2是本发明的栅格法环境建模;
图3是本发明的自主救援车的姿态;
具体实施方式
下面结合附图和实施例,对本发明的技术解决方案进行详细地说明,但不应理解为是对技术方案的限制。实施例中采用两个栅格来描述条形救援车。在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
图1给出本路径信息压缩传输方法的执行过程。请参见图1,下面是对方法中各个步骤的详细描述。
步骤S101:中央控制模块以真实工作空间图片信息为依据,建立一个X行Y列的栅格地图,如图2所示:栅格地图左上角被作为原点坐标100,生成栅格地图密度为X×Y,其中单元格边长依据机器人外形大小与真实工作空间的比例设计;栅格地图中障碍物区域的单元格被标记为“0”,称为“障碍物单元格”200;可行区域单元格被标记为“1”称为“可行单元格”300;标记出发点单元格400,符号标记为S;标记目标点单元格500,符号标记为D;
步骤S102:中央控制模块通过现有路径规划方法,计算出最优路径,最优路径的存储信息包含救援车坐标和救援车姿态信息;所述的现有路径规划方法的申请号为“201810143863.2”名称为“基于自学习蚁群算法的条形机器人路径规划方法”;考虑到救援车为条形,因此栅格地图中由两个单元格表示,称为头单元格和尾单元格;头单元格坐标作为整个救援车坐标;每条路径信息存储数据结构为一个广义表,如公式(1)所示:
P
其中:x∈{1,2,...,X};y∈{1,2,...,Y};θ∈{1,2,3,4}
其中:P
步骤S103:在最优路径传输到救援车之前,中央控制模块完成压缩计算;压缩公式如下:
η
公式(2)中,η
步骤S104:中央控制模块将压缩后的路径传输给机器人;需要传输的压缩路径表示如下:
步骤S105:机器人获得规划路径
公式(4)中,符号“%”表示取模运算;符号
步骤S106:机器人执行解压缩后的路径P
- 危险环境中条形自主救援车路径信息压缩传输方法
- 针对大数据中MPI数据接口的信息压缩传输方法