一种全景摄像头标定方法
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及汽车360全景泊车影像系统,特别是一种全景摄像头的标定方法。
背景技术
360全景泊车系统需要对摄像头的内外参数进行标定,在很多时候,并没有固定的场地,这时候就需要在布上印制棋盘格,放在车辆的周围,并采集摄像头图像进行标定。
现有的标定方法有两种情况:一、标定布比较复杂,需要在车的周围各个方位都铺设标定布,布的成本高,布铺设比较麻烦。二、标定布比较简单,前后两块布即可,但成功率低,失败时需要手工提点,操作时间长,手工提点操作精度不稳定会引起标定效果稍差。
发明内容
本发明的目的是在于解决现有360全景泊车系统的摄像头内外参数的标定方法较为复杂,成本较高,操作较为繁琐,且成功率较低,需要通过人工额外操作。而提供一种采用前后两块标定布实现全自动全景摄像头标定方法。
一种全景摄像头的标定方法,所述的标定方法步骤如下:1-1、先将两块标定布分别放置在车头和车尾的正中间,且与车辆垂直,两块标定布以车辆为中心形成一个长方形,再以车辆为原点创建物理坐标系,通过测量两个标定布的间距,得到标定布中黑色四边形顶点图像;
1-2、在进行具体标定操作前,先把全景四路摄像头图像一起采集,然后每个摄像头分开标定,并设置对应的阈值组N[C]和P[C]。进一步的,所述1-1步骤中的标定布黑色四边形顶点的方法步骤如下:
2-1、首先,将标定布中黑色四边形顶点图像高斯滤波;2-2、其次,将标定布中黑色四边形顶点图像二值化,为了减少光照的影响,采用局部二值化,求出以当前像素值A为中心的N*N均值B,当A-B>P时,为1,否则为0,其中N和P为阈值;
2-3、对二值图像进行膨胀和腐蚀,以清除小黑块;
2-4、对二值图像进行轮廓扫描,得到所有黑块的轮廓,并根据轮廓四边形,判断是否为四边形,如果是,则保存四边形的四个顶点。
进一步的,所述1-2步骤中每个摄像头的标定步骤如下:3-1、使用一组阈值N[m]和P[m],对图像的左半部分进行黑色四边形的顶点提取,过滤掉边长过小的四边形,得到四边形顶点PL(4*x个,x为四边形数量);
3-2、使用一组阈值N[m]和P[m],对图像的右半部分进行黑色四边形的顶点提取,过滤掉边长过小的四边形,得到四边形顶点PR(4*y个,y为四边形数量);
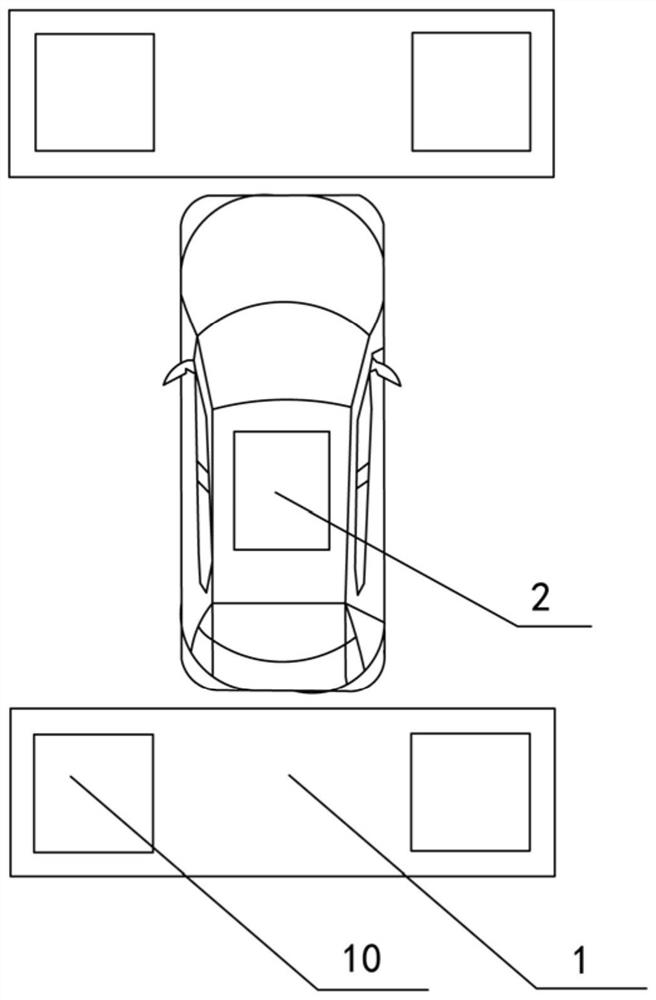
3-3、假如PL的一个四边形为标定布一黑色四边形,PR的一个四边形为标定布另一黑色四边形,配对组成八个图像坐标,则本已知标定布黑色四边形的物理坐标,根据图像坐标和物理坐标,通过高斯牛顿迭代法对摄像头的内外参数一起进行标定,并得到平方残差和S,当S 3-4、如果m 更进一步的,前后左右全景摄像头采用上述方法标定完成后,选取车辆周围地面任一区域的物理地址,根据标定结果转换成对应摄像头的物理坐标,则得到拼接后的全景视图。 采用上述技术方案的有益效果是:本发明通过定制的两块标定布实现对全景摄像头内外参数一起标定,解决了全景泊车标定布铺布比较复杂的问题,并降低了标定布的成本。 附图说明 图1为本发明的标定布示意图; 图2为本发明中标定布与车辆位置示意图; 图3为本发明中所述的标定拼接后的全景视图。 附图中,各标号所代表的部件列表如下:1-标定布,10-黑色四边形,2-车。 具体实施方式 以下结合附图和本发明优选的具体实施例对本发明的内容作进一步地说明。所举实例只用于解释本发明,并非用于限定本发明的范围。 如图1中所示,在本方案中制作了一种标定布,把这个标定布铺在车辆的前后进行全景摄像头的标定,本标定布的特点如下: 1、前摄像头、后摄像头、左摄像头和右摄像头都可以提取到两个四边形的共八个角点,且各个角点间隔合理,这样的八个角点可以同时标定摄像头的内外参数,标定效果好,速度快。 2、黑色四边形外留有合理的白色边框,这样布局的标定布角点提取的成功率非常高,为摄像头标定成功率打下坚实的基础。 3、标定布尺寸合适,开模非常方便,标定布成本低。 如图2至3中所示,本方案中所述的一种全景摄像头的标定方法,所述的标定方法步骤如下: 1-1、先将两块标定布分别放置在车头和车尾的正中间,且与车辆垂直,两块标定布以车辆为中心形成一个长方形,再以车辆为原点创建物理坐标系,通过测量两个标定布的间距,得到标定布中黑色四边形顶点图像; 1-2、在进行具体标定操作前,先把全景四路摄像头图像一起采集,然后每个摄像头分开标定,并设置对应的阈值组N[C]和P[C]。在本方案中根据上述1-1步骤中的标定布黑色四边形顶点的方法步骤如下: 2-1、首先,将标定布中黑色四边形顶点图像高斯滤波; 2-2、其次,将标定布中黑色四边形顶点图像二值化,为了减少光照的影响,采用局部二值化,求出以当前像素值A为中心的N*N均值B,当A-B>P时,为1,否则为0,其中N和P为阈值; 2-3、对二值图像进行膨胀和腐蚀,以清除小黑块; 2-4、对二值图像进行轮廓扫描,得到所有黑块的轮廓,并根据轮廓四边形,判断是否为四边形,如果是,则保存四边形的四个顶点。在本方案中,根据上述1-2步骤中对每个摄像头的标定步骤如下: 3-1、使用一组阈值N[m]和P[m],对图像的左半部分进行黑色四边形的顶点提取,过滤掉边长过小的四边形,得到四边形顶点PL,所需要提取的黑色四边形顶点的数量为4*x个,其中x为四边形数量;在本方案中,关于过小的定义如下:当分辨率按720*1280时,前摄像头和后摄像头图像四边形边长像素小于50时,则认为过小,左摄像头和右摄像头图像四边形边长像素小于13时,则认为过小; 3-2、使用一组阈值N[m]和P[m],对图像的右半部分进行黑色四边形的顶点提取,过滤掉边长过小的四边形,得到四边形顶点PR,所需要提取的黑色四边形顶点的数量4*y个,其中y为四边形数量;在本方案中,关于过小的定义如下:当分辨率按720*1280时,前摄像头和后摄像头图像四边形边长像素小于50时,则认为过小,左摄像头和右摄像头图像四边形边长像素小于13时,则认为过小; 3-3、假如PL的一个四边形为标定布一黑色四边形,PR的一个四边形为标定布另一黑色四边形,配对组成八个图像坐标,则本已知标定布黑色四边形的物理坐标,根据图像坐标和物理坐标,通过高斯牛顿迭代法对摄像头的内外参数一起进行标定,并得到平方残差和S,当S 3-4、如果m 4、根据权利要求3所述的全景摄像头的标定方法,其特征在于:前后左右全景摄像头采用上述方法标定完成后,选取车辆周围地面任一区域的物理地址,根据标定结果转换成对应摄像头的物理坐标,则得到拼接后的全景视图。 以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种全景摄像头标定方法
- 一种汽车全景摄像头标定方法及装置