用于机动车头灯的照明设备
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及一种用于机动车头灯的照明设备,该照明设备包括如下组成部分:
- 发光单元,该发光单元具有发光装置,该发光装置包括多个发光像素,这些发光像素布置在发光像素阵列中,其中该发光单元被设立为通过输出光通量朝着在该照明设备前方的主辐射方向产生分段的光分布;
- 光传感设备,该光传感设备具有光传感器,该光传感器具有多个传感器像素,这些传感器像素布置在传感器像素阵列中,其中该光传感设备被设立为检测射到该光传感器上的光的光通量;
- 控制单元,该控制单元与该发光单元和该光传感设备连接并且被设立为操控该发光单元来产生分段的光分布。
本发明还涉及一种机动车头灯,该机动车头灯具有至少一个按照本发明的照明设备。
背景技术
ADB系统或ADB机动车头灯通常包括:周围环境记录装置,诸如摄像机或摄像机系统;和机动车头灯系统。ADB系统的——众所周知的——工作原理是:机动车头灯系统根据周围环境记录装置向机动车头灯系统提供的信息来控制机动车头灯并且例如使借助于机动车头灯来产生的光分布的相对应的区域隐没或调暗。调暗是指减少在该区域内所输出的光通量。
就ADB系统而言,可以分为动态类型的ADB系统和矩阵类型的ADB系统(参见US2016/0368414 A1,[0045]段)。在动态类型的ADB系统的情况下,在使用枢转驱动装置的情况下可以在所产生的光分布中提供隐没区(“dark zone(暗区)”)。在矩阵类型的ADB系统的情况下,大多借助于对相对应的光源的关断/遮光来产生隐没区。之前提到的用于机动车头灯的照明设备优选地是矩阵类型的设备。
尤其是从机动车头灯制造商的角度,在ADB系统的情况下不利的是:周围环境记录装置在结构上与机动车头灯系统分开。ADB系统的之前提到的主要部分通常来自不同的制造商。机动车头灯系统通常具有接口,该接口被设置用于馈入从周围环境记录装置方面所提供的信息。这例如导致:机动车头灯制造商在设置遮光场景时依赖于从外部提供的、例如由购买的周围环境记录装置提供的信息。所提到的信息常常以所谓的对象清单形式存在。周围环境记录装置产生这种对象清单的方式是: 该周围环境记录装置例如利用之前提到的摄像机系统来拍摄在摄像机系统的视野(英文“Field of View”)内的图像,其中该视野优选地与机动车前方的相关区域适配,并且该周围环境记录装置借助于存在于该周围环境记录装置中的计算单元来分析这些图像。在此,视野与相关区域的适配被理解为:该视野具有对于检测至少处在机动车前方的行车道来说足够大的张角。计算单元提供之前提到的对象清单作为输出(Output)。例如可存在车辆,如载货车(LKW)、载客车(PKW)、摩托车等等,作为这种清单中的对象。通常在摄像机系统的坐标系中给每个单个对象分配坐标。因此,该原始坐标系的原点常常大约处在机动车的内部空间中的后视镜的后侧,因为摄像机系统的摄像机通常布置在那里。
如果现在控制系统获得这种对象清单作为输入,则该控制系统根据该对象清单来算出所要产生的光图像。在此,首先必须将对象的坐标换算到机动车头灯的坐标系中。这需要相对高的计算能力,造成相关的时间延迟并且是一种可能的错误源。还常常发生额外错误,这些额外错误由于从周围环境记录装置的计算单元方面对这些对象的错误识别而形成。这种类型的经常发生的错误是在前面行驶的载货车与两个摩托车之间的混淆——该计算单元依据第一次拍摄识别出载货车的尾灯,其中在第二次例如接下来的拍摄中相同的尾灯被解读为两个摩托车。因为机动车头灯系统的控制系统不能影响这些数据,所以视这些尾灯在对象清单中是被分配给这两个摩托车(照亮)还是被分配给载货车(隐没)而定,可以形成对在这些尾灯之间的区域的周期性的调亮和遮光。这尤其可能导致由于光反射而使驾驶员眩目。
发明内容
本发明的任务可以在于:提供一种自给自足的ADB照明设备,该ADB照明设备不依赖于外部的图像拍摄装置的数据,而且其中等待时间减少且同时遮光的精度提高。
该任务通过如下方式来解决:
发光单元、光传感设备和控制单元共同布置在基本载体上,并且与基本载体共同形成一个结构单元,
其中发光像素阵列的发光像素分成至少两个发光像素组,其中发光像素组可以分别以立体发光角产生分段的光分布的区段,
而且其中传感器像素阵列的传感器像素分成至少两个传感器像素组,其中传感器像素组可以分别探测在被分配给该传感器像素组的立体探测角内的光并且分别被分配给发光像素组,其中射到每个传感器像素组上的光都能作为被分配给相应的传感器像素组的光通量值来检测,
其中可由传感器像素组探测到的立体探测角与所分配的发光像素组的立体发光角相同,
而且其中控制单元被设立为将由相应的传感器像素组探测到的光通量值与可分别规定的阈值单独进行比较,其中在超出该阈值的情况下控制单元减少相对应的发光像素组的光通量。
在一个优选的实施方式中,可以有利地规定:传感器像素阵列具有至少一个、优选地多个、例如两个、三个或四个传感器像素行以及多个、优选地超过1000个、尤其是1024或2048个传感器像素列,其中传感器像素行优选地水平布置。
可以是适宜的是:发光像素阵列具有至少一个、优选地多个发光像素行以及多个发光像素列,其中发光像素行优选地水平布置。
如果基本载体一体化地构造,则得到特别简单的构造。
可以规定:基本载体具有散热体,在该散热体上布置光传感器、发光装置和控制单元。
还可以有利地规定:基本载体具有电路板,其中光传感器、发光装置和控制单元安置在电路板上。应注意:在这种情况下,光传感器、发光装置和控制单元同样布置在基本载体上,但是与该基本载体并不发生接触。
在一个关于单个零件的更换有利的实施方式中,可以规定:基本载体包括第一电路板和第二电路板,其中发光装置安置在第一电路板上而光传感器安置在第二电路板上,其中第一电路板与第二电路板电且机械连接。
然而,一种有利的构造也可以是如下基本载体,该基本载体由多个(>= 2个)单元根据已知方法形状配合或材料配合地拼接为使得该基本载体在机械和热方面与一体化的基本载体几乎等价,尤其是关于在变化的温度条件(例如:-40℃至125℃)下的尺寸稳定性方面以及关于光学组件参考面的形成方面与一体化的基本载体几乎等价。
还可以规定:光传感器和发光装置共同布置在一个平面内,其中该平面优选地基本上垂直于该照明设备的主辐射方向布置。
在一个特别优选的实施方式中,可以规定:至少一个、尤其是每个传感器像素构造为至少一个光电转换元件,尤其是构造为至少一个光电二极管。
如果至少一个、尤其是每个传感器像素构造为多个、优选地超过两个、尤其是四个矩阵式布置的光电转换元件、尤其是光电二极管,则得到进一步的优点,其中至少一个传感器像素的光电转换元件被装箱(gebinnt)和/或具有至少一个共同的浮动扩散区。
如果多个传感器像素以CMOS技术制成的“有源像素传感器(Active PixelSensors)”(APS-CMOS)形式来编组,则得到一个特别有利的变型方案,其中这里一些用于光电二极管的功能(A/D转换、对读出的时控、放大)的外围电路直接在同一半导体构件上实现。
在一个特别有利的变型方案中,可以规定:发光像素、尤其是每个发光像素构造为至少一个LED光源。
在另一变型方案中,可以规定:各个发光像素是分段实施的单片LED光源的部分(具有100-10000个可分开操控的发光像素的半导体构件)。
还可以规定:至少一个、优选地每个发光像素构造为区域光调制器、例如DMD芯片的镜阵列的至少一个镜。LED光源和区域光调制器的组合完全是可设想的。
如果该照明设备还包括激光光源、例如红外激光光源,其中该激光光源优选地布置在基本载体上并且尤其设立为发送器组件,用于结合作为LIDAR传感器的接收器部分的上述光电二极管(传感器像素)进行测距,则可以进一步减少在使分段的光分布的区域隐没时的各种错误。
如果控制单元由正好一个微控制器组成,该微控制器被设立为不仅控制光传感器而且控制发光装置,则可以实现特别快地发挥作用的照明设备。
还可设想的是:控制单元包括至少两个、优选地正好两个微控制器,这些微控制器彼此连接来进行通信,其中优选地第一微控制器被设立为控制光传感器而且优选地第二微控制器被设立为控制发光装置。
在此,可以有利的是:这些微控制器中的至少一个微控制器紧挨着地与光敏传感器元件连接,例如在同一电子构件外壳(“Chip-package(芯片封装)”)内直接放置在该光敏传感器元件后面,并且实施传感器相关的数据预处理。该预处理例如包括:将像素彼此间的测量值进行比较并且与所寄存的值进行比较;或对所寄存的分析特性(读出率、曝光时间、放大……)进行选择和操控。
附图说明
在下文,本发明连同其它优点依据示例性的实施方式进一步予以阐述,所述实施方式在附图中阐明。在所述附图中:
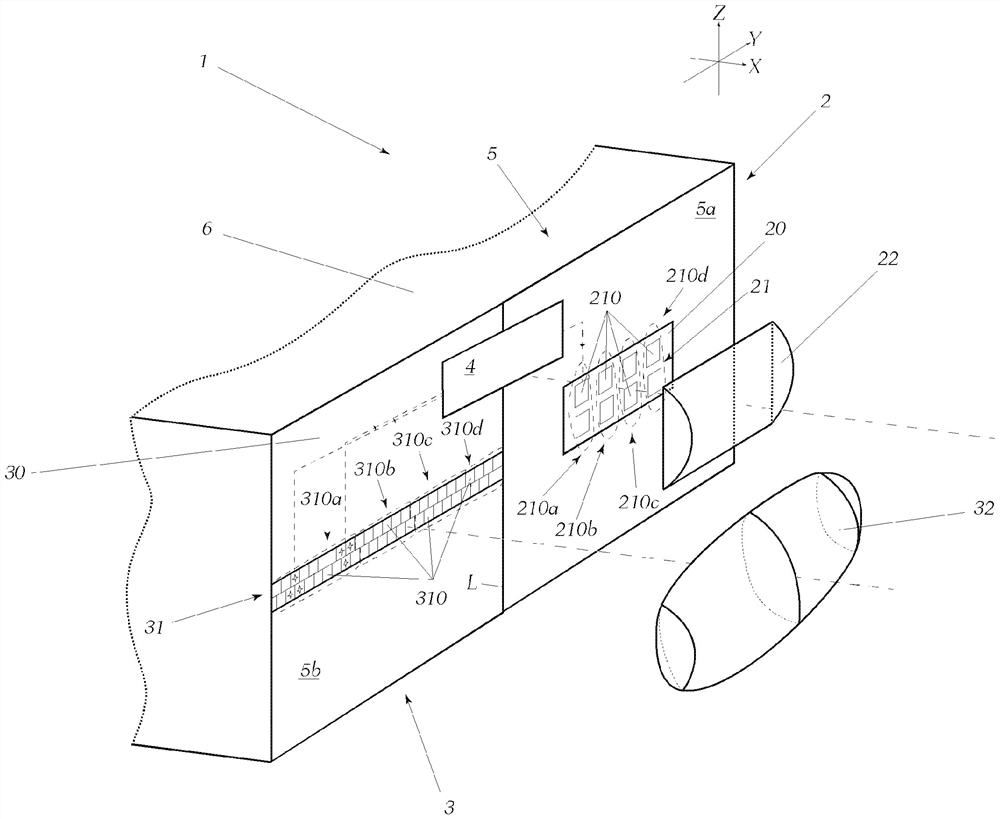
图1以透视图示出了示例性的光模块;
图2示出了图1中的光模块的前视图;以及
图3示出了具有由两部分组成的电路板的光模块的前视图。
这些附图是示意图,这些示意图仅仅示出了可有助于阐述本发明的那些组成部分。本领域技术人员立即认识到:用于机动车头灯的照明设备可具有多个其它的、这里未示出的组成部分,如调整和调节装置、供电装置等等。
为了简化可读性并且在适宜情况下,这些附图配备有参考轴。这些参考轴涉及该照明设备在机动车中的专业安装位置,并且是与机动车相关的坐标系。
还应该清楚的是:与方向相关的术语、如“水平”、“竖直”、“上”、“下”等等应结合本发明以相对含义来理解并且要么涉及之前提到的专业安装位置要么涉及在光图像内或在交通空间内所辐射的光分布的行业惯用取向。
具体实施方式
首先参考图1。图1示出了光模块1,该光模块对应于按照本发明的照明设备。术语“光模块”应该旨在表示:按照本发明的照明设备优选地被构造为一个结构单元。
光模块包括发光单元2,该发光单元可具有发光装置20和投影光学系统22。发光装置20包括多个布置在矩阵式装置21中的发光像素210。该装置常常被称作发光像素阵列。在图1中示出的发光像素210构造为具有矩形、例如方形发光面的LED光源。发光像素阵列21可由两行和四列组成。发光单元2被设立为产生分段的光分布。在此,每个发光像素210都被设立用于产生分段的光分布的至少一个区段。也就是说,当有发光像素亮起时,该发光像素例如借助于附件光学系统22作为光分布的区段被成像到光模块1前面。在最简单的情况下,附件光学系统22构造为优选地一体化的光学体,诸如透镜——自由形式透镜、双凸或平凸透镜等等。多个附件光学系统以及甚至更复杂的成像系统同样是可设想的并且可以根据光模块1的具体使用而是可能的并且对于区段的最佳定界来说必要。唯一的附件光学系统22所具有的优点是:光模块1在其构造方面紧凑且简单。此外,由于光学器件的数目最少,将关于光学器件方面的公差保持得小。
优选地,利用不同的发光像素210来产生不同的区段。易于理解的是:每个发光像素210或2100可具有多个不同的亮度状态。例如可以使发光像素进入“熄灭(AUS)状态”——发光像素不发光。在可调光发光像素的情况下,这些可调光发光像素的亮度可以取0(熄灭(AUS)状态)与最大值——“亮起(AN)状态”之间的多个值。在此,可以有利的是:通过脉冲宽度调制(PWM)例如以200Hz的频率来执行调光。
光模块1还包括光传感设备3,该光传感设备具有光传感器30、例如CMOS传感器以及优选地具有在光传感器上游的收集光学系统32,该收集光学系统与光模块的发光区相匹配地全面且精确地成像于传感器上的相关测量区域。光传感器30构造为多个矩阵式布置的传感器像素310——传感器像素阵列31。优选地,传感器像素阵列31只具有少量的行,尤其是少于35行、例如两行、三行或五行ZB1、ZB2、ZB3,但是具有多个、优选地超过1000个、尤其是1024或2048个传感器像素列SB1, SB2, ... SBn(也参见图2和3)。传感器像素阵列31是准一维阵列。传感器像素行是ZB1、ZB2、ZB3,优选地水平布置。即每个传感器像素行ZB1、ZB2、ZB3优选地由如下传感器像素310、3100组成,这些传感器像素以水平排列并排布置。优选的CMOS传感器是:NSI1000、NSI3000、NSI3100、NSI3500、NSI5000、NSI5800、NSI3000EVB。
不同于从现有技术公知的ADB系统或光模块,这里没有使用花费高的CMOS或CCD摄像机,而是使用例如条状的光传感器30、诸如CMOS传感器。同样能够使用CCD传感器。这意味着:没有给光传感器3分配基于处在摄像机中的传感器所记录的数据来执行图像分析的图像分析单元。由于在传感器像素阵列31中的行数少,光传感设备3沿垂直方向Y的视野例如限于光轴之上和之下直至+/-7度、通常+/-4度的角度范围。这种光传感设备3的典型拍摄具有条状。优选地,光传感设备3被取向为使得该光传感设备可以检测迎面而来的机动车的头灯和/或在前面行驶的机动车的尾灯。
优选地,使用具有读出率很高(< 40 KHz)的传感器像素。利用这种读出率,可能的是:识别出外部的、显眼的光源的上述PWM调光的基本频率,并且因此例如将车辆LED灯(>200至400 Hz)与路灯(50 Hz频率)进行区分和分类。同时,传感器的高潜在读出率提供了如下可能性:在高动态范围的同时通过例如多次不同的曝光过程或像素的耦合来将该传感器的灵敏度设计得最佳。
替代图像分析单元等等,给光传感设备3分配控制单元4,该控制单元不包括花费高的图像分析软件并且因此(在通常意义上)不能执行图像分析。也就是说,尤其是,控制单元4不执行对象识别。例如,控制单元4可以构造为唯一的微控制器,该微控制器被设立为控制发光单元2的发光像素210并且在此改变这些发光像素的亮度(见上文)。光传感器3与控制单元4连接,用于传输所记录的数据。在最简单的情况下,例如在传感器读出单元中的接近芯片的预处理之后,如果所探测到的光的强度超过特定阈值,则每个传感器像素310将信号发送给控制单元4。优选地,该阈值被选择为使得外部光源、诸如迎面而来的车辆的机动车头灯或者在前面行驶的车辆的尾灯的光被探测,但是处在照明设备之外并且被该照明设备照亮的对象的光反射在它们虽然被测量到但是未被评价为相关的外部光源的意义上没有被探测。作为对控制单元4、例如微控制器从光传感设备3获得的上述优选地二元值信号的反应,控制单元4降低或提高发光装置20的相对应的发光像素210的亮度或光通量。在一个优选的实施方式中,控制单元4将相对应的发光像素210关断或接通,也就是说将亮度或光通量降低到0或提高该亮度/该光通量到最大值或以其它方式预先给定的基值。在下文讨论发光像素与传感器像素之间的对应性。
图1使得看出:不仅光传感器30而且发光装置20共同布置在平面Ezy内,其中平面Ezy优选地基本上垂直于光模块的主辐射方向X来布置。在此,得出一种特别有利的系统,其中发光单元2的坐标系与光传感设备3的坐标系的对照至少非常简化,例如只需要修正参考点的非常小的侧向偏移并且不需要修正光像素和传感器像素的光轴的倾斜,或完全不再需要。
光模块1也包括基本载体5,其中发光单元2、光传感设备3和控制单元4共同布置在基本载体5上,优选地固定在基本载体5上并且因此与基本载体5共同形成一个结构单元6。
例如,基本载体5要么可以单片地制造要不然也可以由(至少)两个适当拼合的单元组成,这些单元确保形成共同的参考平面Ezy。
例如,基本载体5可以被构造为散热体,该散热体具有固定在其上的印刷电路板,其中在该印刷电路板上可以安置光传感器30和具有所属的电子装置的发光装置20,该光传感器例如构造为CMOS芯片。印刷电路板可以一体化地(图2)构造或者由两部分组成地(图1和3)构造。控制单元4同样可以布置在该印刷电路板上。
即该印刷电路板可包括第一电路板5a和第二电路板5b,其中发光装置20、2000可以安置在第一电路板5a上而光传感器30、3000可以安置在第二电路板5b上,其中第一电路板5a与第二电路板5b电(用于传输信号)并且机械——例如沿着(分界)线L——连接。
还可设想的是:基本载体5还具有第一散热体和第二散热体,其中这些散热体彼此匹配并且彼此机械连接地被实施,使得例如能够实现相互散热。散热体尤其可以彼此连接为使得光传感器30、3000和发光装置20、2000处在共同平面Ezy内。
可设想的是:发光单元位于第一电路板上,该第一电路板布置在第一散热体上,并且光传感设备位于第二电路板上,该第二电路板布置在第二散热体上。
在平面Ezy内无论如何都适宜的是:发光单元和光传感设备侧面并排布置,要不然上下重叠、即相对于主辐射方向侧面错开地、然而无论如何都对中地彼此对齐地布置。
发光像素阵列21的发光像素210、2100可以分成至少两个发光像素组,在所示出的示例中分成四个发光像素组210a、210b、210c、210d,其中发光像素组210a、201b、210c、210d可以分别以立体发光角来产生分段的光分布的区段。
传感器像素阵列31的传感器像素310、3100可以分成至少两个传感器像素组,在所示出的示例中分成四个传感器像素组310a、310b、310c、310d,其中传感器像素组310a、310b、310c、310d可以分别探测在被分配给传感器像素组310a、310b、310c、310d的立体探测角内的光并且分别被分配给发光像素组210a、210b、210c、210d,其中射到每个传感器像素组310a、310b、310c、310d上的光能作为被分配给相应的传感器像素组310a、310b、310c、310d的光通量值来检测。在这种情况下,可由传感器像素组310a、310b、310c、310d探测到的立体探测角与所分配的发光像素组210a、210b、210c、210d的立体发光角相同。
也可以规定:一个发光像素对应于一个发光像素组并且一个传感器像素对应于一个传感器像素组。
图2和3示出了发光单元2,其中发光装置2000具有发光像素阵列21,该发光像素阵列具有m个优选地水平布置的行ZL1, ..., ZLm和n个列SL1, ..., SLn,其中m > 2且n >4。易于理解的是:这种发光装置2000可以轻易替代发光装置20被用在图1的光模块1中。这种发光像素阵列21例如可以利用区域光调制器——一种微镜致动器——来实现。这种区域光调制器、诸如DMD(英文Digital Micromirror Device(数字微镜设备))或者弗劳恩霍夫光子微系统研究所的区域光调制器具有至少几百个但是通常上千个乃至几百万个可单独寻址的(单)微镜。在此,各个微镜的大小在微米范围(例如10μm或更多)内。非限制性示例是:具有大小为16x16 μm²的256x256个镜的阵列;具有大小为16x16 μm²的512x2048个镜的阵列;具有大小为10x10 μm²的1024x2048个镜的阵列;或者具有大小为40×40 μm²的240×200个镜的阵列。即完全可设想的是:每个发光像素2100都被构造为单微镜、优选地正好一个单微镜。因此,在这种发光装置2000的情况下发光像素2100的数目很多,使得可被单个传感器像素310检测到的分段的光分布的范围或立体发光角可包括至少一个区段但是常常可包括多个区段或光分布的一个区段的立体发光角。
换言之,这意味着:传感器像素组310a、310b、310c、310d可以从(对象空间内的)同一立体角接收光,在该同一立体角内,对应的发光像素组210a、210b、210c、210d可产生光。传感器像素组310a、310b、310c、310d不能从处在该立体角之外的对象接收到光。对应的发光像素组210a、210b、210c、210d也不能对这种对象进行照明。
在此,每个传感器像素组310a、310b、310c、310d在探测状态下输出信号,该信号表明或包含所探测到的光的光通量值。
结合本发明,术语“探测状态”被理解为如下状态,在该状态下,传感器像素组310a、310b、310c、310d的传感器像素310、3100检测它们相应的立体探测角并且在该部分内探测其强度超过预先确定的阈值的光。在此,该阈值被选择为使得外部光源被探测,但处在该照明设备之外并且被该照明设备照亮的对象的光反射没有被探测。
易于理解的是:分段的光分布不必完全被照亮,而是也可包括暗区域,这些暗区域可以通过使发光装置的特定部分熄灭来产生。
如已经简要提及的那样,控制单元4被设立为将由相应的传感器像素组310a、310b、310c、310d探测到的光通量值与可分别规定的阈值单独进行比较,其中在超出该阈值的情况下控制单元4改变相对应的发光像素组210a、210b、210c、210d的光通量,诸如将该光通量减少、尤其是减少到0,或者将该光通量提高、尤其是提高到最大值。这引起:例如光分布的外部光源处于其中的那些区域可以被遮光,而控制单元4不执行花费高的图像分析。由此,等待时间和错误源的数目在对光模块的至少相同且大多数情况下更高效的使用的情况下被减少。在最简单的情况下,发光像素210或发光像素组210a、210b、210c、210d作为对光强度值的反应被点亮或被熄灭。
传感器像素310、3100中的至少一个传感器像素以及尤其是所有传感器像素310、3100可以构造为至少一个光电转换元件或至少一个光电转换器,尤其是构造为至少一个光电二极管。然而优选APS-CMOS传感器形式。
但是,也可设想的是:至少一个、尤其是每个传感器像素3100构造为多个、优选地超过两个、尤其是四个矩阵式布置的光电转换元件、尤其是光电二极管。图2和3使得看出:每个传感器像素3100可以构造为转换元件的2x2矩阵装置。在此,至少一个传感器像素3100的光电转换元件可以被装箱和/或具有至少一个共同的浮动扩散区3101。术语“浮动扩散区”被理解为飘动或浮动的扩散区或飘动或浮动的扩散域。
还能从图2和3得知:控制单元4包括至少两个微控制器4B、4L,所述至少两个微控制器彼此连接,用于进行通信。在此,第一微控制器4B可以被设立为控制光传感器30、3000,而第二微控制器4L可以被设立为控制发光装置20、2000。在此处应强调:这两个微控制器4B或4L都不执行上述图像拍摄或分析。微控制器4B和4L优选地至少在逻辑上直接关联,例如如所描述的那样通过像素间逻辑分配来关联。
光模块1还可包括激光光源、尤其是红外激光光源,其中激光光源被设立用于测距并且优选地布置在基本载体5上或与印刷电路板5、5a或5b以机电方式连接。在此,激光光源可以在连续模式(连续波或CW激光)下或在脉冲模式下使用。在此,光传感器30附加地被设立为:探测由激光光源产生并且被外部对象反射的光。在此,激光光源通过控制单元4来控制,该控制单元可以依据通过光传感器30探测的被一个或多个外部对象反射的激光来确定距这一个或同时多个对象的距离。为了确定距离,例如可以使用三角测量(例如在CW激光的情况下)或者增强型飞行时间法(例如在脉冲式激光的情况下)。
- 用于机动车头灯的照明设备
- 用于汽车头灯的灯和用于机动车的头灯