一种闸机通行逻辑自动识别系统和方法
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及轨道交通技术领域,尤其涉及一种闸机通行逻辑自动识别系统和方法。
背景技术
随着轨道交通行业的迅猛发展,地铁自动售检票系统(Automatic FareCollection,AFC)的自动化、系统化、安全性和智能化程度的要求越来越高。自动检票机是AFC系统中的重要组成部分,闸机通过对乘客票卡信息的有效识别和通道中通行行为的有效判断来实现自动检票功能,保证乘客顺利进出闸,并协助联网收费系统计费。闸机的性能高低和智能化水平直接影响到乘客的通行安全和通行效率,影响地铁运营公司的收益。随着二维码通行过闸,人脸识别、掌静脉和步态识别等生物识别技术的发展,自动检票系统的重要性更加突出。
闸机的通行逻辑是自动判断乘客在闸机通道中的通行行为,通过控制扇门运动,保证乘客正常通行过闸,防止无效乘客闯闸的核心逻辑算法。通行逻辑是自动检票系统中重要的组成部分,是实现AFC系统智能化,保证乘客过闸安全性和闸机通行效率的关键所在。
由于通行逻辑在自动检票系统中的重要作用和核心地位,对其效率、安全性和准确性也是最高的。但是由于实际现场中人流量大小不均衡,行人身材及通行行为各异,导致在实际现场应用中,会偶尔发生扇门夹人、行人通行不判断导致的漏人、扇门提前关闭导致的绊人等等异常情况。导致闸机通行逻辑判断的效率低下、安全性和精度不高。
发明内容
为了解决背景技术中存在的技术问题,本发明提出了一种闸机通行逻辑自动识别系统和方法,以减少上述异常情况的发生,进一步提高闸机通行逻辑判断的效率、安全性和精度。
本发明提出的一种闸机通行逻辑自动识别方法,包括:
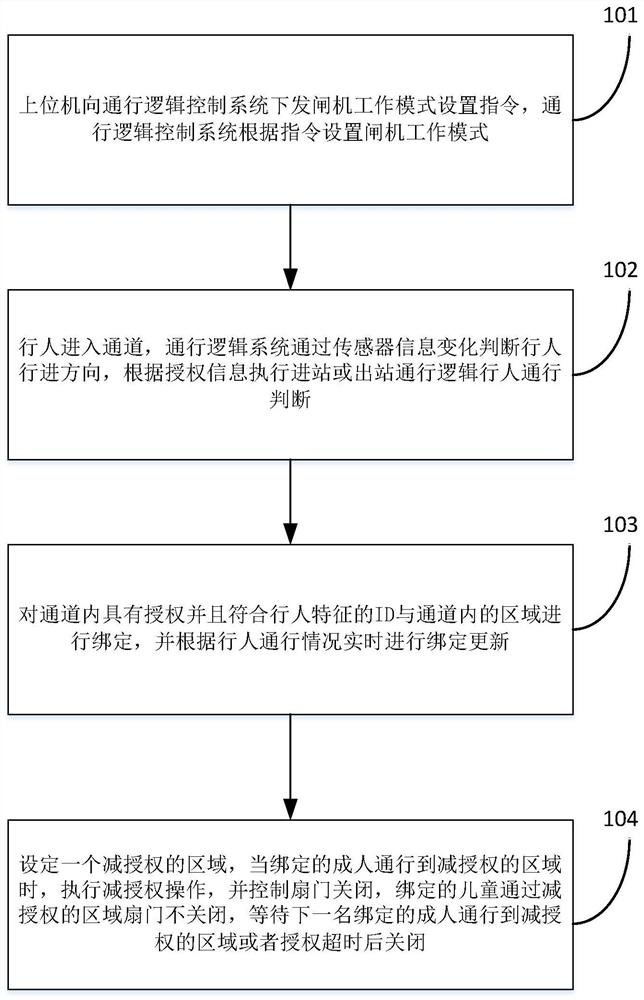
步骤101,上位机向通行逻辑控制系统下发闸机工作模式设置指令,通行逻辑控制系统根据指令设置闸机工作模式;
步骤102,行人进入通道,通行逻辑系统通过传感器信息变化判断行人行进方向,根据授权信息执行进站或出站通行逻辑行人通行判断;
步骤103,对通道内具有授权并且符合行人特征的ID与通道内的区域进行绑定,并根据行人通行情况实时进行绑定更新;
步骤104,设定一个减授权的区域,当绑定的成人通行到减授权的区域时,执行减授权操作,并控制扇门关闭,绑定的儿童通过减授权的区域扇门不关闭,等待下一名绑定的成人通行到减授权的区域或者授权超时后关闭。
优选地,步骤103中,对通道中绑定的ID进行身高判断,确定通行行人的类型,行人类型分为儿童和成人。
优选地,步骤103中包括:没有授权时,不进行区域ID绑定;有授权时,通道区域传感器被遮挡,判断遮挡信息是否符合成人特征,符合成人特征的信息与通道内的区域进行绑定,不符合成人特征的ID不进行绑定。
优选地,具体包括:绑定信息包括行人的ID,行人的位置,是否是成人的标记信号等,用以记录通道中行人的类型和位置。
优选地,步骤103中具体包括:当该区域的传感器全部放开遮挡时,解除物体位置与该区域的绑定关系;当通道内物体在移动时,不断更新绑定关系,解除旧的绑定关系。
优选地,步骤104中包括:身高判断根据身高传感器的数量设置不同的阈值,阈值越高即要求被遮挡的身高传感器数量越多,身高判断更严格;阈值越小即要求被遮挡的身高传感器数量越少,身高判断更宽松。
优选地,步骤104还包括:闸机通行逻辑自动识别系统具备安全保护算法,即通过扇门开关标志信号和到位信号联合判断,让行人即便在减授权的情况下后退遮挡安全区时,如果扇门仍然在关闭过程中就会触发开门操作。
本发明还提供了一种闸机通行逻辑自动识别系统,包括:
设置在闸机中的通行逻辑控制板,通行逻辑控制板通过串口与上位机进行通讯,通过IO分别与方向指示器、票种指示灯、扇门进行通讯;
通行逻辑控制板中嵌入通行逻辑算法,通行逻辑算法通过管脚配置并设置定时器来轮询获取传感器信号和扇门到位信号;通过获取到的传感器信号判断通道内行人过闸行为,通过扇门到位信号判断扇门开关是否完成。
优选地,闸机通道设置16对光电对射传感器S1-S16,具体位置为:S1(-845mm,740mm),S2(-700mm,740mm),S3(-555mm,400mm),S4(-380mm,900mm),S5(-250mm,400mm),S6(-155mm,900mm),S7(0mm,800mm),S8(0mm,500mm),S9(132mm,500mm),S10(132mm,800mm),S11(-155mm,900mm),S12(250mm,400mm),S13(380mm,900mm),S14(555mm,400mm),S15(700mm,740mm),S16(845mm,740mm);四对身高传感器HS1-HS4,具体位置为:HS1(-200mm,1300mm),HS2(-80mm,1300mm),HS3(80mm,1300mm),HS4(200mm,1300mm)。
优选地,在通行方向上,将闸机通道空间分为五个区域:检测区、监控区、安全区、离开区和身高检测区,检测区由S1和S2两对传感器组成,监控区由S3,S4,S5,S6四对传感器组成,安全区由S7,S8,S9,S10四对传感器组成,离开区由S11,S12,S13,S14,S15,S16六对传感器组成,身高检测区由HS1,HS2,HS3,HS4四对传感器组成。
本发明中,通行逻辑判断方法主要通过控制扇门开关来实现闸机自动检票的功能,即通过固定布局的对射传感器以采集行人通行的情况,依据传感器信号自动判断通道内通行的成人、儿童或行李,并同时判断物体在通道内的位置;通行逻辑算法检测到授权信号时控制扇门打开,当判断到行人通过减授权区域时,减掉授权信号计数,当没有授权信号时,控制扇门关闭。本发明所采用的对射传感器布局和相应的算法逻辑判断,有效的降低了扇门夹人、行人通行漏人等异常情况,大大提高了闸机的安全性和可靠性。
附图说明
图1为本发明实施例中传感器在闸机的位置分布图;
图2为本发明实施例中通道区域划分图;
图3为本发明实施例提出的闸机通行逻辑自动识别方法流程图;
图4为本发明实施例提出的通行逻辑算法结构图;
图5为本发明实施例提出的通行逻辑处理图。
具体实施方式
本发明实施例提出了一种闸机通行逻辑自动识别系统,包括设置在闸机中的通行逻辑控制板,通行逻辑控制板中嵌入通行逻辑算法。通行逻辑控制板通过串口与上位机进行通讯,通过IO分别与方向指示器、票种指示灯、扇门进行通讯。通行逻辑控制板中的通行逻辑算法通过管脚配置并设置定时器来轮询获取传感器信号和扇门到位信号,具体为通过配置不同定时器自动读取指定管脚的传感器信号和扇门到位信号,当启动定时器TIMER1时,系统每100ms轮询一次;当启动定时器TIMER 2时,系统每5ms轮询一次;通过获取到的传感器信号判断通道内行人过闸行为(类型和位置等),通过扇门到位信号判断扇门开关是否完成,以防扇门夹人。
首先,通行逻辑控制板通过采集到的传感器信号来判断通道内物体类型是成人、儿童或行李,并判断通道内该物体所在位置;然后,更改闸机模式(进站或出站)和方向指示器;接着,通过授权信号控制扇门打开和票种指示灯;最后,通过对行人在通道内的位置判断来减授权计数以实现关门操作。
其中,闸机通道设置16对光电对射传感器(分别标号为S1-S16),具体位置如图1所示:S1(-845mm,740mm),S2(-700mm,740mm),S3(-555mm,400mm),S4(-380mm,900mm),S5(-250mm,400mm),S6(-155mm,900mm),S7(0mm,800mm),S8(0mm,500mm),S9(132mm,500mm),S10(132mm,800mm),S11(-155mm,900mm),S12(250mm,400mm),S13(380mm,900mm),S14(555mm,400mm),S15(700mm,740mm),S16(845mm,740mm)。以上设置只是本发明的一个实施例,也可以根据实际情况调整传感器的数量及具体位置。
根据国家标准GB10000-1988中国成年人人体平均尺寸,确定传感器在垂直方向上的空间布局。当人站在闸机中央时肘关节所处位置正好位于闸机的上边缘处,膝关节处于闸机的中下部,踝关节处于闸机的下边缘。人体躯干移动、四肢的摆动就是在这几个关节点带动下完成的。据此可以确定传感器纵向上大致的位置,即肘关节、腕关节、膝关节、踝关节,或之间的某一位置。通道传感器位置如图1所示,通道传感器为S1-S16。
由于漫反射传感器测量精度不足,本发明的身高传感器采用光电对射传感器,一共四对传感器,高度均为1米3,符合地铁运营企业对儿童免费乘坐地铁身高的要求,身高传感器的位置分布图如图1所示,身高传感器为HS1-HS4。具体位置如下:HS1(-200mm,1300mm),HS2(-80mm,1300mm),HS3(80mm,1300mm),HS4(200mm,1300mm)。身高传感器也可以根据实际情况调整传感器的数量及具体位置。
为有效研究通行逻辑,在通行方向上,将闸机通道空间分为五个区域:检测区、监控区、安全区、离开区和身高检测区,如图2所示。检测区由S1和S2两对传感器组成,检测乘客进入通道,在此区域无闯入检测,可在此区域刷卡。监控区由S3,S4,S5,S6四对传感器组成,监控乘客通行和尾随人员,区分人和物体,探测无票闯入,监控区第一个传感器开始检测无票闯入。安全区由S7,S8,S9,S10四对传感器组成,为扇门活动区域,有人在安全区时,扇门不能关闭,防止夹人,辅助判断行人通行。离开区由S11,S12,S13,S14,S15,S16六对传感器组成,确认通行完成,探测反向闯入,离开区第一个传感器(S16)开始检测反向闯入,离开区是对面方向检测区和监控区的组合。身高检测区由HS1-HS4四对对射传感器组成,用来检测乘客是否为成人。
本发明实施例提供了一种闸机通行逻辑自动识别方法,如图3所示,包括以下步骤:
步骤101,上位机向通行逻辑控制系统(通行逻辑控制板)下发闸机工作模式设置指令,通行逻辑控制系统根据指令设置闸机工作模式。具体模式包括:进站模式,闸机设置为进站方向可授权通行,反方向授权无效禁止通行,方向指示器为进站绿灯,反方向红灯;出站模式,闸机设置为出站方向可授权通行,反方向授权无效禁止通行,方向指示器为出站绿灯,反方向红灯;双向模式,闸机设置为进站出站两个方向都可授权通行,进出站方向指示器均为绿灯;进站免检模式,闸机设置为进站方向自由通行,扇门打开,反方向授权无效禁止通行,若检测到反方向通行,则触发反向闯闸报警,扇门关闭阻挡通行,方向指示器为进站绿灯,反方向红灯;出站免检模式,闸机设置为出站方向自由通行,扇门打开,反方向授权无效禁止通行,若检测到反方向通行,则触发反向闯闸报警,扇门关闭阻挡通行,方向指示器为出站绿灯,反方向红灯;双向免检模式,闸机设置为双向自由通行,扇门打开,方向指示器为双向绿灯;暂停服务模式,闸机设置为双向禁止通行,双向授权无效。
步骤102,行人进入通道,通行逻辑系统通过传感器信息变化判断行人行进方向,根据授权信息执行进站或出站通行逻辑行人通行判断;
当行人进入闸机通道时,通行判断函数通过两侧通道最外侧两个传感器的时序来判断方向。遮挡S1、S2传感器,判断为进站方向,并将通行逻辑临时模式设定为进站模式,调用进站行人通行判断函数进行进一步判断,并改变方向指示器。相反的,遮挡S15、S16传感器,判断为出站方向,并将通行逻辑临时模式设定为出站模式,调用出站行人通行判断函数进行进一步判断,并改变方向指示器。当方向判定完成之后,对侧的传感器若再被遮挡,则触发反向闯闸报警。通行逻辑临时模式的设定优先受上位机下发模式进行改变,若上位机下发模式为免检模式或暂停服务模式,则临时模式不受传感器判定的方向影响;若上位机下发模式为单向进站或单向出站模式,则临时模式不受传感器判定方向影响;若上位机下发模式为双向进出站模式,则临时模式受到传感器判定方向影响。
步骤103,对通道内具有授权并且符合行人特征的ID(身份标识信息)与通道内的区域进行绑定,并根据行人通行情况实时进行绑定信息更新。其中,绑定信息包括行人特征的ID,行人的位置,是否是成人的标记信号等,绑定信息用以记录通道中行人的类型和位置,通过对通道中绑定的行人特征的ID进行身高判断,确定通行行人的类型,行人类型分为儿童和成人。在该函数中,引入了区域绑定机制,即对通道内行人位置与通道内的区域进行绑定。该机制可以有效判断行人及通道内其他物体在通道内的位置,在不同的区域采取不同的判断逻辑,有效增加了通行逻辑判断的准确性。区域绑定机制为通行逻辑的判断创造了优越的前提条件,是整个通行逻辑算法的基础。该机制首先将通道分为如图2所示的几个区域。当某个区域的传感器有信号变化时,增加通道内物体位置与该区域的绑定关系;当该区域的传感器全部放开遮挡时,解除物体位置与该区域的绑定关系;当通道内物体在移动时,不断更新绑定关系,解除旧的绑定关系,一旦移动物体遮挡到前一个区域的传感器,绑定关系就更新,此时若还挡住后一个区域的传感器,绑定关系以新的绑定为主,旧的绑定关系会被覆盖。另外,该步骤中,没有授权时,不进行区域ID绑定;有授权时,通道区域传感器被遮挡,判断遮挡信息是否符合成人特征,符合成人特征的信息与通道内的区域进行绑定,不符合成人特征的ID不进行绑定。该机制在有效的增加判断的准确度的同时,因为更多的关注了被绑定区域的逻辑判断,所以间接降低了逻辑判断的复杂维度。
在通行逻辑判断中,传感器实时状态更新也至关重要,由于实际通行情况的复杂,单单只使用传感器当前时刻的实时状态不能满足通行逻辑准确度的要求。所以,本发明采用了不断更新数组中值的状态来采用传感器当前时刻的状态、上一个轮询时刻的状态和上上个轮询时刻的状态作为通行逻辑的判断依据。所有传感器的状态不断的储存到数组中,通过指针的形式选用哪一个时刻的状态值。由于在开启TIMER2之后,传感器状态每5ms采集一次,所以当数组存满之后,新的传感器状态将覆盖数组中最早一个时刻传感器的状态值。
步骤104,设定一个减授权的区域,当绑定的成人通行到减授权的区域时,执行减授权操作,并控制扇门关闭,绑定的儿童通过减授权的区域扇门不关闭,等待下一名绑定的成人通行到减授权的区域或者授权超时后关闭。以进站方向为例,减授权所在区域为传感器S10、S11、S12所在区域,在临时模式判断完成后,如果行人通行到传感器S10、S11、S12所在区域,则判断传感器S10、S11、S12遮挡的时序。即:S10传感器当前时刻被遮挡或上一时刻被遮挡,同时S11传感器当前时刻被遮挡或上一时刻被遮挡,包括四中组合遮挡:即S10当前、S11当前;S10上一时刻、S11上一时刻;S10当前、S11上一时刻;S10上一时刻、S11当前;S10号和S11传感器当前时刻被遮挡,同时S11传感器上一时刻不被遮挡;S12传感器上一时刻被遮挡,同时S12传感器当前时刻被遮挡;S10、S11、S12传感器当前时刻全被遮挡,同时S12传感器上一时刻不被遮挡。当满足这几种时序,且安全区传感器都没有被遮挡的情况下,执行减授权操作。
对于成人、儿童和行李的判断也是通行逻辑的主体部分。身高判断根据身高传感器的数量设置不同的阈值,阈值越高即要求被遮挡的身高传感器数量越多,身高判断更严格;阈值越小即要求被遮挡的身高传感器数量越少,身高判断更宽松。由传感器S3、S4或S5、S6或S11、S12或S13、S14同时被遮挡都可以视做一个人,而大多数情况行李不会同时遮挡这些传感器,即使遮挡,也无法实现和人通过减授权一样的效果。所以,非人的情况本发明都将其归类为行李或其他物体通行的情况。对于行人通行的情况,本发明通过采集HS1、HS2、HS3、HS4四对身高传感器的遮挡信号来判断是否为成人。为了避免现场中其他复杂情况可能导致的干扰,本发明设定一个触发机制,即设置一个有效通行标志,该标志通过某些固定的传感器遮挡情况来触发,当其触发时采集身高传感器的信号。触发有效标志的情况为S6、S8传感器同时遮挡,S9、S11传感器同时遮挡,S7、S9传感器同时遮挡,S8、S10传感器同时遮挡。
对于安全性方面,本发明主要考虑防止扇门夹人,其主要措施就是防止扇门在某些极端情况下触发关闭机制。首先,由于本发明是通过通道两侧最外侧一共四个传感器判断行人通行方向,必须遮挡一侧最外的两个传感器,例如S1、S2传感器才会判断有行人从进站方向进入通道,如果没有方向的判断不会触发反向闯闸报警,这样的机制大大减少了在行人正常通行时,由于对侧某个传感器传来错误的遮挡信号而导致的扇门在行人正常通行且未通过安全区时关闭,大大减少了扇门在位置情况下关闭而导致的绊人情况。另外,本发明在安全区增加了判断机制,即通过扇门开关标志信号和到位信号联合判断,让行人即便在减授权的情况下后退遮挡安全区时,如果扇门仍然在关闭过程中就会触发开门操作,这样的机制有效的防止了行人异常的通行行为或是某些行李导致的扇门夹人事件。
在通行逻辑算法中由通行判断函数判断通道内行人过闸行为,通行判断函数嵌套在定时器之中,如图4所示,传感器状态信号首先由TIMER1(1号定时器中断服务函数)来每100ms轮询获取,当传感器全部处于空闲状态(没有任何物体通行)时,恢复所有状态,清除所有临时设置,并检查传感器故障状态(例如,某个传感器连续被遮挡时间超过30s定义为传感器出现故障),进行相应的模式更改操作。当传感器状态反馈与上一时刻相同时,检查报警信号,如果长时间遮挡传感器会触发报警。当传感器状态反馈为有遮挡且有更新时(包括从无遮挡到有遮挡,或从有遮挡到无遮挡),使能TIMER2(2号定时器终端服务函数)。当传感器状态反馈为故障时,进行报警操作,改变方向指示器,并关闭TIMER2使能。当TIMER2打开后,TIMER2每5ms轮询一次,以便于获取到实时的传感器状态,同时TIMER2还负责计时,来实现15s减授权的功能,即乘客刷卡之后最多有15s的通行时间,若乘客未在15s内完成通行,则授权减除,扇门关闭。TIMER2还包含了统一关门处理,即轮询获取通行逻辑算法发送的扇门关闭请求信号,来统一进行扇门关闭操作。当TIMER2获取到的实时传感器状态有遮挡并且有更新时,调用通行逻辑判断函数来进行行人通行判断。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种闸机通行逻辑自动识别系统和方法
- 一种闸机通行逻辑自动化检测系统及方法