一种用于智能运动体避障的控制方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明属于运动控制技术领域,具体涉及一种用于智能运动体避障的控制方法。
背景技术
智能运动体是指可以自主感知周围环境并通过执行器改变运动状态的设备,例如自动导引车、无人驾驶飞机和无人水下航行器等装置设备。智能运动体在行驶过程中经常会碰到许多动态障碍物,这就要求智能运动体能够对动态障碍物做出迅速有效的避障反应。
现如今,市面上存在的避障方法大多都是通过导引技术来实现的,但是各种导引方式都具有一定的局限性,例如电磁感应导引需要在地下铺设电缆,无法实时改变路径;磁条导引只需要地面铺设磁条,可以通过改变磁条位置来改变路径,灵活度较高,但是这两种方式均由系统事先确定行驶路径,无法自动调整;激光导引无需其他地面设施就可以实现灵活的路径规划,但价格高昂。
智能运动体在沿着规定路线行驶的过程中,容易与其行驶方向不同的智能运动体在路径交叉点产生节点冲突,影响智能运动体的行驶安全。现有技术中通常通过在智能运动体上安装检测传感器(红外传感器)等,避免智能运动体之间的碰撞。但在路径交叉点检测难度大,精度较低,无法有效保证智能运动体的安全行驶。
发明内容
本申请的目的在于提出了一种用于智能运动体避障的控制方法,利用总排斥势场反映待控制智能运动体(r)周围的拥挤程度并通过待控制智能运动体(r)受到的合力F
本申请提供了一种用于智能运动体避障的控制方法,该方法的具体步骤包括:
S1:检测t时刻待控制智能运动体(r)的运动状态C
S2:根据步骤S1获得的位置p
S3:根据人工势场法中的排斥势场,分别获得t、t+1和t+2时刻待控制智能运动体(r)受到的来自于排斥范围内的智能运动体(s)的排斥势场
S4:根据步骤S2获得的速度v
在一些实施例中,该方法的具体步骤还包括获得待控制智能运动体(r)受到的合力F
在一些实施例中,待控制智能运动体(r)受到的合力F
其中,
t+1时刻待控制智能运动体(r)的加速度a
v
p
其中,
根据t时刻待控制智能运动体(r)受到的来自于排斥范围内智能运动体(s)的排斥势场
在一些实施例中,步骤S2中相对位置
其中,
通过t时刻排斥范围内智能运动体(s)相对于待控制智能运动体(r)的位置
在一些实施例中,步骤S3中排斥势场
其中,η为斥力尺度因子,
ρ为待控制智能运动体(r)的排斥范围半径。
在原有t时刻排斥势场
在一些实施例中,步骤S3中总排斥势场
其中,
S为排斥范围内的智能运动体(s)的总数量。
由于只考虑t时刻待控制智能运动体(r)受到来自其前方排斥范围内智能运动体(s)的排斥势场
在一些实施例中,步骤S3中急停时的排斥势场U
其中,ρ
η为斥力尺度因子,
v
准确计算出急停时的排斥势场U
在一些实施例中,t时刻相向运动的待控制智能运动体(r)和排斥范围内的智能运动体(s)在单位时间内由最大速度v
其中,
d
准确计算出急停距离ρ
在一些实施例中,获得t+1时刻待控制智能运动体(r)的加速度大小||a
其中,
获得加速度大小||a
在一些实施例中,若在t时刻待控制智能运动体(r)在排斥范围内不存在智能运动体(s),待控制智能运动体的速度大小||v
本申请提供的一种用于智能运动体避障的控制方法具有如下优势:
1、利用待控制智能运动体(r)感知排斥范围内智能运动体(s)产生的t时刻排斥势场
2、利用待控制智能运动体(r)受到的合力F
附图说明
通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本申请的其它特征、目的和优点将会变得更明显:
图1是根据本发明的实施例的一种用于智能运动体避障的控制方法的待控制智能运动体(r)排斥范围半径ρ和急停距离ρ
图2是根据本发明的实施例的一种用于智能运动体避障的控制方法的智能运动体之间的信息交互示意图;
图3是根据本发明的实施例的一种用于智能运动体避障的控制方法的待控制智能运动体(r)的急停状态示意图;
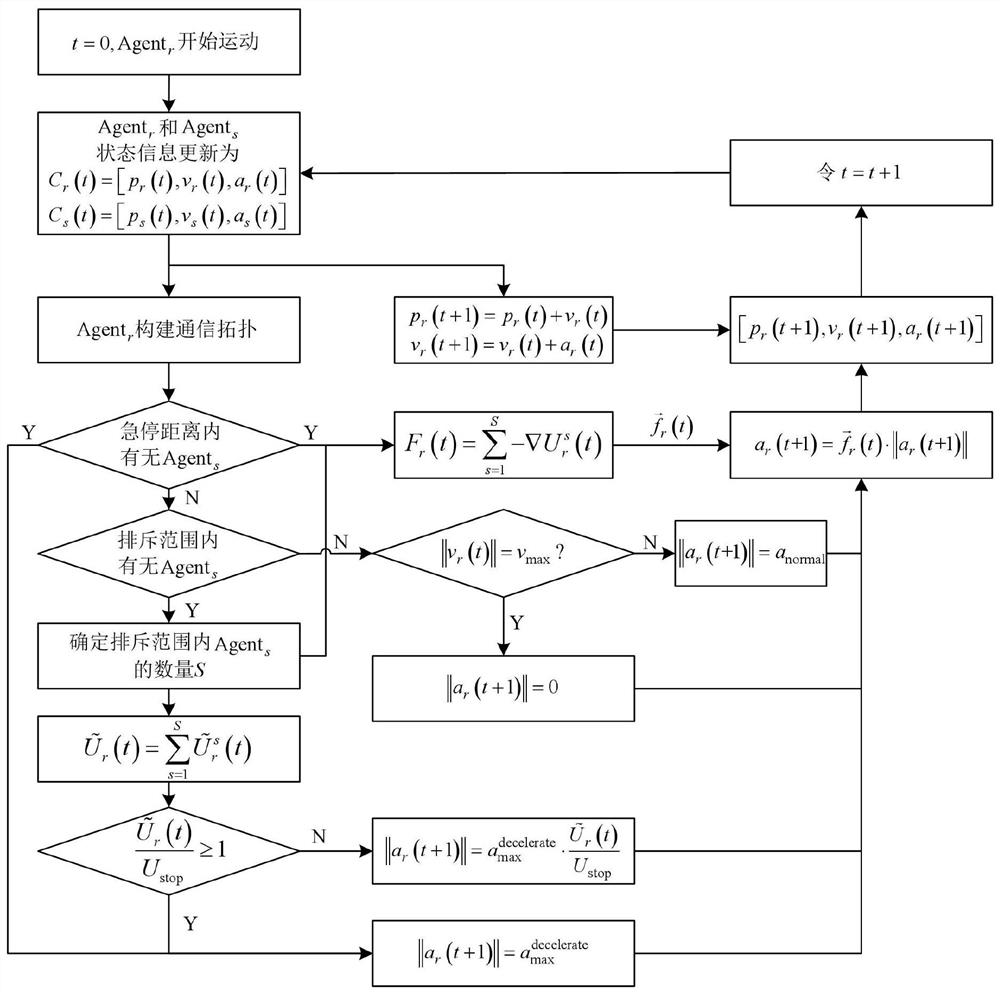
图4是根据本发明的实施例中的一种用于智能运动体避障的控制方法的避障流程示意图。
具体实施方式
下面结合附图和实施例对本申请作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与有关发明相关的部分。
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
图1示出了待控制智能运动体(r)排斥范围半径ρ和急停距离ρ
利用获得的相对位置
图2示出了待控制智能运动体(r)与排斥范围内智能运动体(s)的信息交互示意图,其中
其中,
进一步的,根据人工势场法中的排斥势场获得在t时刻待控制智能运动体(r)感知到排斥范围内的智能运动体(s)产生的排斥势场
其中,η为斥力尺度因子,ρ为待控制智能运动体(r)的排斥范围半径。
由于只考虑t时刻待控制智能运动体(r)受到来自其前方排斥范围内智能运动体(s)的排斥势场
其中,
总排斥势场
图3示出了待控制智能运动体(r)与排斥范围内智能运动体(s)的急停状态示意图,如图3所示,在t时刻待控制智能运动体(r)与排斥范围内智能运动体(s)在相距为急停距离ρ
其中,
急停时的排斥势场U
其中,η为斥力尺度因子。
待控制智能运动体(r)将在t+1时刻对t时刻的总排斥势场
在t时刻,通过待控制智能运动体(r)感知到排斥范围内的智能运动体(s)的排斥势场
其中,S为排斥范围内智能运动体(s)的数量。
根据所得到的合力F
v
p
利用获得的t+1时刻加速度a
下面结合一个具体的避障流程来说明上述的实现方法,如图4所示,包括以下步骤:
t=0时刻,待控制智能运动体(r)开始运动,通过红外传感器(或其它传感器)实时检测待控制智能运动体(r)的运动状态C
获得t+1时刻待控制智能运动体(r)速度v
若排斥范围内存在智能运动体(s)则需确定排斥范围内的智能运动体(s)的数量S,通过公式进一
获得控制智能运动体(r)在t+1时刻的加速度大小||a
需要说明的是,以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步的定义和解释。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述的权利要求的保护范围为准。
- 一种用于智能运动体避障的控制方法
- 一种用于全向智能轮椅避障的模糊神经网络控制方法