一种面向机器学习的中远距空中动作参数确定方法
文献发布时间:2023-06-19 11:22:42
技术领域
本申请属于仿真系统设计技术领域,特别涉及一种面向机器学习的 中远距空中动作参数确定方法。
背景技术
随着作战飞机性能的不断提高,现代空中战场态势瞬息万变,为占 据有利态势,作战飞机需要机动灵活地改变飞行高度、速度、航向、坡 度等飞行参数。近些年,智能空战决策问题愈来愈受到各国军事作战和 武器研制部门的重视,空战决策中最核心的内容是空战机动决策。在空 战机动决策的优化方法中首先需要设计机动动作库。动作库中包含供决 策选用的动作集,动作库设计是空战机动决策的基础。在现代空战模拟 中,空战中飞行员的战术行动可以视为按时间排列的一系列的空战战术 行为,即空战战术行动是时间维度上的飞行员战术行为链。在典型战术 动作库的设计中,有一个很重要的问题—机动动作的控制策略,即如何 实现机动动作贴合更加真实的空战行为,同时在智能空战中,智能计算 机更加准确的控制实现满足作战需求的飞行轨迹。当前的机动动作种类 繁多,许多机动控制复杂,与实际作战贴合运用相差较大。
解决以上问题的方案是结合实战经验,按照飞行员作战过程中作战 操作控制策略进行操作,形成相关空战机动控制方法。
发明内容
本申请提供了一种面向机器学习的中远距空中动作参数确定方法, 包括:
步骤S1、确定进行中远距空中动作的机动动作类型;
步骤S2、利用机动仿真程序,仿真得到各机动动作的典型轨迹;
步骤S3、根据所述典型轨迹的操作变化情况,以操作变化超过阈值 时所对应的时间为划分点,将所述典型轨迹分解为多个控制段;
步骤S4、获取各机动动作的进入条件限制参数及每一控制段的控制 参数;
步骤S5、在进行机器学习时,根据所述进入条件调整飞机状态,根 据所述控制参数进行飞控解算,形成机动控制指令。
优选的是,步骤S1之后,进一步包括获取各机动动作的机动描述及 战术意图,并固化为数据库文件。
优选的是,步骤S3中,所述典型轨迹分解至少分解为进入段、中间 段及改出段。
优选的是,所述控制参数包括按轨迹确定的航向、轨迹平面倾角、 油门杆坡度、纵向加速度以及过载值。
优选的是,所述油门杆坡度根据所述轨迹平面倾角确定。
优选的是,所述机动动作类型包括等速平、偏置、平飞加减速、向 下斤斗、快速爬升、S形、斜斤斗/半斜斤斗、跟踪导引、水平转弯、快速 转弯、稳定转弯、仰射、俯冲机动、偏置俯冲、俯冲机动改出、半滚倒 转。
本申请以作战使用和战术目的为出发点,按照飞行员在作战中控制 逻辑,分解控制策略和控制参数,以及进入和退出的条件判定,以达到 较为真实的支撑空战行为模拟。
附图说明
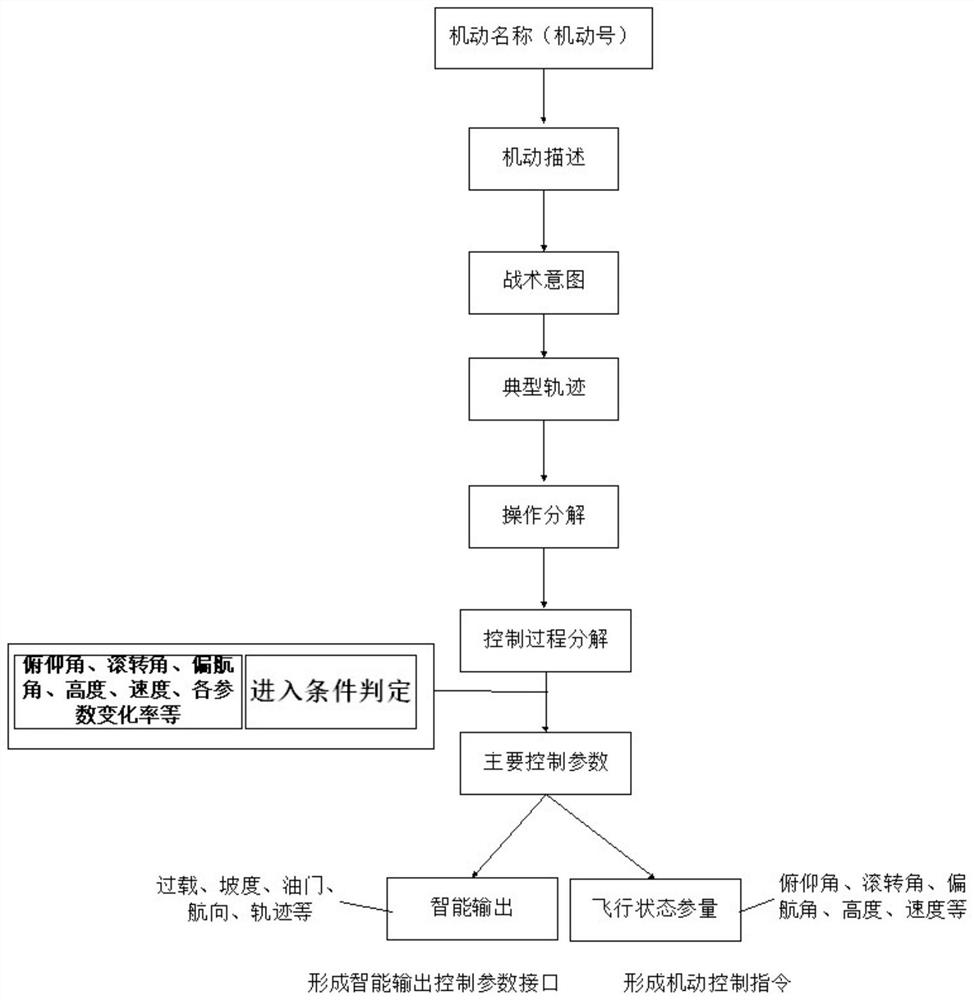
图1是本申请面向机器学习的中远距空中动作参数确定方法的一优 选实施例的流程图。
图2是向下斤斗机动典型轨迹示意图。
图3是向下斤斗机动典型参数高度的变化情况示意图。
具体实施方式
为使本申请实施的目的、技术方案和优点更加清楚,下面将结合本 申请实施方式中的附图,对本申请实施方式中的技术方案进行更加详细 的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件 或具有相同或类似功能的元件。所描述的实施方式是本申请一部分实施 方式,而不是全部的实施方式。下面通过参考附图描述的实施方式是示 例性的,旨在用于解释本申请,而不能理解为对本申请的限制。基于本 申请中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下 所获得的所有其他实施方式,都属于本申请保护的范围。下面结合附图 对本申请的实施方式进行详细说明。
本申请提供了一种面向机器学习的中远距空中动作参数确定方法, 如图1所示,主要包括:
步骤S1、确定进行中远距空中动作的机动动作类型;
步骤S2、利用机动仿真程序,仿真得到各机动动作的典型轨迹;
步骤S3、根据所述典型轨迹的操作变化情况,以操作变化超过阈值 时所对应的时间为划分点,将所述典型轨迹分解为多个控制段;
步骤S4、获取各机动动作的进入条件限制参数及每一控制段的控制 参数;
步骤S5、在进行机器学习时,根据所述进入条件调整飞机状态,根 据所述控制参数进行飞控解算,形成机动控制指令。
在一些可选实施方式中,步骤S1之后,进一步包括获取各机动动作 的机动描述及战术意图,并固化为数据库文件。
在一些可选实施方式中,步骤S3中,所述典型轨迹分解至少分解为 进入段、中间段及改出段。
在一些可选实施方式中,所述控制参数包括按轨迹确定的航向、轨 迹平面倾角、油门杆坡度、纵向加速度以及过载值。
以下详细说明。
(一)机动动作的确定
根据公开空战描述知识以及飞行员常用飞行机动动作,总结归纳出 16种典型机动动作,包括等速平飞、平飞加减速、快速爬升、斜斤斗/半 斜斤斗、水平转弯、稳定转弯、俯冲机动、俯冲机动改出、偏置、向下 斤斗、S形、跟踪导引、快速转弯、仰射、偏置俯冲、半滚倒转。典型机 动动作见表1。
表1典型机动动作
(二)描述方法
机动动作描述主要包括以下内容:
机动描述:机动动作名称,给出该机动动作的较为详细的定义和描 述;
战术意图:描述采用此机动动作的作战意图,作战场景,战术目的;
典型轨迹:利用机动仿真程序,仿真分析机动动作典型轨迹;
操作过程分解:针对该机动动作的实现,描述油门和驾驶杆的操作 步骤及操作要领。
控制参数:通过仿真分析,给出控制参数建议。
(三)机动动作描述流程如图1所示:
在设计超视距空战动作库时:要根据需要先取动作。对于选用的动作 要熟悉它们的基本形态,同时也要了解它们的战术功能。对战术动作进行 具体设计,就是根据动作形态所决定的规律及其战术功能,设置控制量 的取值序列。确定动作序列中各个动作所需要的控制量要求值和结束条 件。即确定动作序列中完成各个动作要求的坡度,纵向加速度和过载值, 称为运动要求值。每个动作对控制量都有特别的要求,可通过建立动作库 确定控制量要求值。动作结束执行的条件包括时间、速度、高度差和角 度等。
由于以作战使用和战术目的为出发点,形成了满足实战需求和控制 更加简化高效的机动动作库,按照实际作战中飞行员的控制逻辑,分解 控制策略和控制参数,以及进入和退出的条件判定,形成了对空战机动 行为较为全面并贴近真实作战的描述,更加有利于在智能空战系统中应 用,较为科学合理。
举例来说。
(一)机动名称:向下斤斗
(二)机动描述
在指定倾斜面内完成向下斤斗,实施方法描述:
a)实施向下转弯,完成航向180°变化的同时,下降一定高度,规避 完成后,向上完成置尾;
b)机动轨迹在一个倾斜的平面内,在倾斜面内轨迹呈圆弧形。
(三)战术意图
向下斤斗的前半段用于规避敌机发射的导弹,确定规避成功后,执 行后半段,回转爬升,占据有利态势,进行发射导弹。向下斤斗是兼具 防御和攻击的机动动作。
(四)典型轨迹
向下斤斗机动典型轨迹如图2所示,向下斤斗机动典型参数变化如图 3所示,图3仅给出了高度的变化情况,实际操作过程中,还应当给出速 度、过载、迎角、俯仰角、滚转角和马赫数的变化情况。
(五)操作过程分解
进入条件判定
进入向下斤斗前,判断当前飞行状态参量是否满足进入该机动条件, 是否需要进行状态调整。
过程段1:选定好转弯方向(左/右),调整油门将发动机状态调整到 给定状态,向转弯方向压杆建立所需要的坡度,驾驶杆放在中立位置且 无侧滑,在2-3s时间内平稳建立4-5g的过载;
过程段2:拉杆保持4-5g的过载(当迎角达到迎角限制时,应改为保 持迎角),根据航向变化调整压杆幅度。
过程段3:拉杆保持4-5g的过载(当迎角达到迎角限制时,应改为保 持迎角),根据航向变化调整压杆幅度,控制航向到初始航向。
改出段:回杆调整坡度改平,保持平飞。
(六)控制过程分解,见下表2。
表2控制过程分解
(七)控制参数选取
向下斤斗控制参数见表3:
表3向下斤斗控制参数
最后,在进行机器学习时,根据所述进入条件调整飞机状态,根据 所述控制参数进行飞控解算,形成机动控制指令。
至此,已经结合附图所示的优选实施方式描述了本申请的技术方案, 领域内技术人员应该理解的是,本申请的保护范围显然不局限于这些具 体实施方式,在不偏离本申请的原理的前提下,本领域技术人员可以对 相关技术特征作出等同的更改或替换,这些更改或替换之后的技术方案 都将落入本申请的保护范围之内。
- 一种面向机器学习的中远距空中动作参数确定方法
- 一种面向分布式机器学习参数同步差异化数据传输方法