基于滑模变结构的移动机器人驱动控制方法、系统和设备
文献发布时间:2023-06-19 11:22:42
技术领域
本发明属于控制系统设计技术领域,特别涉及一种基于滑模变结构的移动机器人驱动控制方法、系统和设备。
背景技术
随着生产技术的发展,对机器人的驱动能力提出的更高的要求,更加合理的控制策略才能满足移动机器人在复杂环境下的控制要求;在移动机器人运动控制系统中,电机的驱动能力及抗扰动能力是机器人运动控制性能的保障,而由于导航定位信息大多以非连续的数据形式采集得到;现有连续的移动机器人驱动控制系统在采样后,可能存在驱动控制系统发散,系统易抖动,稳定较差;因此,以离散化的方式实现驱动控制器的设计是很有必要的。
发明内容
针对现有技术中存在的技术问题,本发明提供了一种基于滑模变结构的移动机器人驱动控制方法、系统和设备,以解决采用现有连续的机器人驱动控制系统,存在系统发散,系统易抖动,稳定性较差的技术问题。
为达到上述目的,本发明采用的技术方案为:
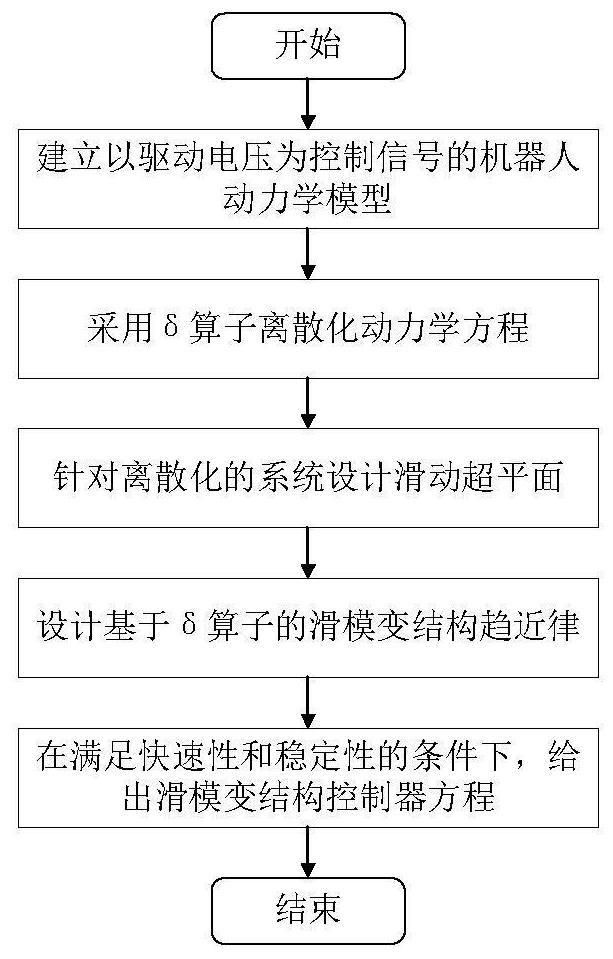
本发明提供了一种基于滑模变结构的移动机器人驱动控制方法,包括以下步骤:
步骤1、建立移动机器人动力学模型;其中,移动机器人动力学模型的控制输入为直流驱动电机的驱动电压;
步骤2、采用δ算子对移动机器人动力学模型进行离散化处理,得到离散后的移动机器人动力学模型;
步骤3、构建滑动超平面和滑模趋近律;
步骤4、根据离散后的移动机器人动力学模型、滑动超平面及滑模趋近律,得到滑模变结构移动机器人驱动控制器;
步骤5、利用滑模变结构移动机器人驱动控制器,对移动机器人进行驱动控制。
进一步的,步骤1中,移动机器人为两轮差速移动机器人;建立移动机器人运动学模型过程具体如下:
步骤11、建立两轮差速移动机器人的Lagrange动力学模型;
步骤12、根据两轮差速移动机器人的Lagrange动力学模型、直流驱动电机的输出方程及直流驱动电机的工作参数,求解移动机器人的运动控制量与直流驱动电机的输入电压的数学模型,即得到所述的移动机器人动力学模型。
进一步的,步骤1中,移动机器人动力学模型的表达式为:
V=[v w]
U
其中,
进一步的,常数矩阵A和常数矩阵B的表达式分别为:
其中,
进一步的,离散后的移动机器人的动力学模型的表达式为:
其中,
进一步的,步骤3中,滑动超平面s(k)的表达式为:
s(k)=c
其中,c为滑态参数矩阵;E(k)为第k个采样时刻的时变衰减矩阵,
进一步的,步骤3中,滑模趋近律的表达式为:
s
其中,ξ为常系数,且ξ>0;q为与δ算子有关的前向位移算子,q>0;
进一步的,步骤4中,滑模变结构移动机器人驱动控制量的表达式为:
u(k)=(c
其中,u(k)为移动机器人在第k个采样时刻的运动控制量。
本发明还提供了一种基于滑模变结构的移动机器人驱动控制系统,包括模型模块、离散模块、构建模块、控制量模块及驱动模块;
模型模块,用于建立移动机器人动力学模型;其中,移动机器人动力学模型的控制输入为直流驱动电机的驱动电压;
离散模块,用于采用δ算子对移动机器人动力学模型进行离散化处理,得到离散后的移动机器人动力学模型;
构建模块,用于构建滑动超平面和滑模趋近律;
控制量模块,用于根据离散后的移动机器人动力学模型、滑动超平面及滑模趋近律,得到滑模变结构移动机器人驱动控制器;
驱动模块,用于利用滑模变结构移动机器人驱动控制器,对移动机器人进行驱动控制。
本发明还提供了一种基于滑模变结构的移动机器人驱动控制设备,其特征在于,包括存储器、处理器及存储在所述处理器中并可在处理器中运行的可执行指令;所述处理器执行所述可执行指令时实现所述的一种基于滑模变结构的移动机器人驱动控制方法。
与现有技术相比,本发明的有益效果为:
本发明提供了一种基于滑模变结构的移动机器人驱动控制方法、系统和设备,采用δ算子对移动机器人动力学模型进行离散化处理,保证了离散驱动控制系统的稳定性;根据构建的滑动超平面及滑模趋近律,建立离散滑模变结构控制器系统,有效保证了系统的稳定控制能力,无抖震且系统鲁棒性好。
进一步的,通过基于δ算子的趋近律描述,在确保系统稳定的前提下,实现反推给出控制系统稳定的控制参数的选取原则,给出控制量的求解算法,保证离散驱动控制系统的无抖震性。
附图说明
图1为本发明所述的基于滑模变结构的移动机器人驱动控制方法的流程示意图;
图2为本发明中的两轮差速移动机器人模型示意图;
图3为本发明中的直流驱动电机的电路示意图;
图4为实施例中的δ算子离散化的驱动控制器的状态曲线图;
图5为实施例中的滑动超平面曲线图;
图6为传统零阶保持器离散化系统状态曲线图;
图7为传统零阶保持器离散化系统滑动超平面曲线图。
具体实施方式
为了使本发明所解决的技术问题,技术方案及有益效果更加清楚明白,以下具体实施例,对本发明进行进一步的详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
本发明提供了一种基于滑模变结构的移动机器人驱动控制方法,包括以下步骤:
步骤1、建立移动机器人动力学模型;其中,移动机器人动力学模型的控制输入为直流驱动电机的驱动电压,移动机器人为两轮差速移动机器人;具体包括以下步骤:
步骤11、建立两轮差速移动机器人的Lagrange动力学模型;
步骤12、根据两轮差速移动机器人的Lagrange动力学模型、直流驱动电机的输出方程及直流驱动电机的工作参数,求解移动机器人的运动控制量与直流驱动电机的输入电压的数学模型,即得到所述的移动机器人动力学模型;其中,移动机器人动力学模型的表达式为:
V=[v w]
U
其中,
常数矩阵A和常数矩阵B的表达式分别为:
K
K
其中,
步骤2、采用δ算子对移动机器人动力学模型进行离散化处理,得到离散后的移动机器人动力学模型;其中,离散后的移动机器人的动力学模型的表达式为:
其中,
步骤3、构建滑动超平面和滑模趋近律;
滑动超平面s(k)的表达式为:
s(k)=c
其中,c为滑态参数矩阵;E(k)为第k个采样时刻的时变衰减矩阵,
滑模趋近律的表达式为:
s
其中,ξ为常系数,且ξ>0;q为与δ算子有关的前向位移算子,q>0;
步骤4、根据离散后的移动机器人动力学模型、滑动超平面及滑模趋近律,得到滑模变结构移动机器人驱动控制器;其中,滑模变结构移动机器人驱动控制器的表达式为:
u(k)=(c
其中,u(k)为移动机器人在第k个采样时刻的运动控制量。
步骤5、利用滑模变结构移动机器人驱动控制器,对移动机器人进行驱动控制。
本发明还提供了一种基于滑模变结构的移动机器人驱动控制系统,包括模型模块、离散模块、构建模块、控制量模块及驱动模块;
模型模块,用于建立移动机器人动力学模型;其中,移动机器人动力学模型的控制输入为直流驱动电机的驱动电压;离散模块,用于采用δ算子对移动机器人动力学模型进行离散化处理,得到离散后的移动机器人动力学模型;构建模块,用于构建滑动超平面和滑模趋近律;控制量模块,用于根据离散后的移动机器人动力学模型、滑动超平面及滑模趋近律,得到滑模变结构移动机器人驱动控制器;驱动模块,用于利用滑模变结构移动机器人驱动控制器,对移动机器人进行驱动控制。
本发明还提供了一种基于滑模变结构的移动机器人驱动控制设备,其特征在于,包括存储器、处理器及存储在所述处理器中并可在处理器中运行的可执行指令;所述处理器执行所述可执行指令时实现如下方法:
建立移动机器人动力学模型;其中,移动机器人动力学模型的控制输入为直流驱动电机的驱动电压;采用δ算子对移动机器人动力学模型进行离散化处理,得到离散后的移动机器人动力学模型;构建滑动超平面和滑模趋近律;根据离散后的移动机器人动力学模型、滑动超平面及滑模趋近律,得到滑模变结构移动机器人驱动控制器;利用滑模变结构移动机器人驱动控制器,对移动机器人进行驱动控制。
本发明提供的一种基于滑模变结构的移动机器人驱动控制系统和设备中相关部分的说明,可以参见本发明所述的一种基于滑模变结构的移动机器人驱动控制方法中对应部分的详细说明,在此不再赘述。
实施例
如附图1-3所示,本实施例提供了一种基于滑模变结构的移动机器人驱动控制方法及系统,包括以下步骤:
步骤1、建立移动机器人动力学模型;其中,移动机器人为两轮差速移动机器人,移动机器人动力学模型的控制输入为直流驱动电机的驱动电压。
具体包括以下步骤:
步骤11、根据Lagrange方程,建立两轮差速移动机器人的Lagrange动力学模型;其中,两轮差速移动机器人的Lagrange动力学模型:
其中,q为移动机器人的广义坐标;
步骤12、根据两轮差速移动机器人的Lagrange动力学模型、直流驱动电机的输出方程及直流驱动电机的工作参数,求解移动机器人的运动控制量与直流驱动电机的输入电压的数学模型,即得到所述的移动机器人动力学模型;
其中,移动机器人动力学模型的表达式为:
V=[v w]
U
其中,
常数矩阵A和常数矩阵B的表达式分别为:
K
K
其中,
推导过程如下:
本实施例中,考虑移动机器人在平面上运行时,其势能保持不变,忽略两轮差速移动机器人的Lagrange动力学模型中的表面动态摩擦力项及万有引力项,并联立移动驱动方程,进行消项处理,得到所述移动机器人动力学模型;
其中,
将两轮差速移动机器人在广义坐标系中的动力学模型整理为:
τ=[τ
其中,
对于移动机器人的小车驱动部分,移动机器人的直流驱动电机的驱动电压U
τ
ω
τ=nτ
U
i
ω=[ω
τ=[τ
其中,L
利用移动机器人的动力学方程及移动机器人的直流驱动电机的工作参数,计算得到移动机器人的驱动轮旋转力矩向量τ与直流驱动电机的驱动电压U
τ=K
K
K
因此,将上式代入
步骤2、采用δ算子对移动机器人动力学模型进行离散化处理,得到离散后的移动机器人动力学模型;其中,离散后的移动机器人的动力学模型的表达式为:
步骤1中,获取的移动机器人的动力学模型为线性连续系统,本实施例采用δ算子,对移动机器人的动力学模型进行离散化处理,得到离散化的移动机器人动力学模型。
其中,
步骤3、构建滑动超平面和滑模趋近律;
步骤31、建立滑动超平面
对于滑模变结构控制系统,只有当机器人动力学模型处于滑动平面上时,才具有最良好的鲁棒性;为使机器人动力学模型在初始时刻即处于滑动平面上,确保其具有良好的鲁棒性,建立的滑动超平面满足s(0)=0,即机器人动力学模型在初始时刻就处于滑动模态,因此,滑动超平面s(k)的表达式为:
s(k)=c
其中,c为滑态参数矩阵;E(k)为第k个采样时刻的时变衰减矩阵,
步骤32、建立趋近律
趋近律的设计是离散变结构控制的核心,对于传统的趋近律,存在抖震问题,抖震对于直流驱动电机产生较大的伤害;本实施例中,基于对抖震原因的分析,在使得系统稳定的前提下,采用基于δ算子描述的趋近律;其中,基于δ算子描述的趋近律的表达式为:
s
其中,s(k)为第k个采样时刻的系统超平面;ξ为常系数,且ξ>0;q为与δ算子有关的前向位移算子,q>0;
以下对本实施例中,基于δ算子描述的趋近律进行验证,具体过程如下:
首先,证明该趋近律能在满足系统的稳定前提下能做到减小系统抖振,具体如下:
对arctan(s
当s较小时,本实施例中的趋近率可以表示为δs(k)≈-qs(k)-μs(k),相当于指数趋近率;其中,μ为与s
在s较大的时候,μ≈εs
当s在原点附近时,μ≈εs
其次,给出离散滑模控制系统稳定的条件:
对于传统离散滑模控制系统的趋近律描述:
s(k+1)=(1-qT)s(k)-ξTsign(s(k))
采用如下的δ算子对上式进行描述:
δs(k)=-qs(k)-ξsign(s(k))=ψs(k)
其中,s(k+1)为第k+1个采样时刻的系统超平面;Ψ为中间变量。
为了使得系统稳定,需使得到达条件δs(k)·s(k)<0,即Ψs(k)·s(k)<0,从而得出Ψ<0时系统稳定。
而欲使得s(k+1)<s(k),且系统不会产生抖震现象,即:
Δs=s(k+1)-s(k)=δs(k)T<0
即,δs(k)=Ψs(k)<0;
即,Ψ和s(k)存在反符号的情况下,系统不会出现抖振,此时q或ξ为可变参数。
本实施例中,按照如下分析进行驱动控制抖振减弱的滑模变结构趋近律的参数选择。
现对K+1时刻的稳定性进行分析,根据Lyapunov直接法,当V(k)的导数δV(k)<0,系统渐进稳定,选定正定函数:
V(k)=s
V(k+1)=s
取:
δV(k)=[V(k+1)-V(k)]/T
得到:
δV(k)=TΦ
进而可得:
δV(k)=TΦ
欲使得δV(k)<0使得系统稳定,则应取TΦ
且,取该取值范围的中间值时系统必然稳定,即:
步骤4、根据离散后的移动机器人动力学模型、滑动超平面及滑模趋近律,得到滑模变结构移动机器人驱动控制量;
由滑动超平面可得,系统的第k+1个采样时刻状态为:
s(k+1)=c
x(k+1)=TA
s(k+1)=c
其中,x(k+1)为移动机器人在第k+1个采样时刻的驱动输入,u(k)为移动机器人在第k个采样时刻的运动控制量。
将上式代入滑模趋近律,分离运动控制量u(k),可得满足稳定性与无抖振的滑模变结构移动机器人驱动控制器的表达式为:
u(k)=(c
步骤5、利用滑模变结构移动机器人驱动控制量,对移动机器人进行驱动控制。
仿真结果
本实施例中,仿真选择离散化采样周期T=0.001s,选择RS380-ST/3545型电机、小车模型如附图2所示;其中,RS380-ST/3545型电机参数如下;电枢电流i
其中,常数矩阵A和常数矩阵B分别为:
选择控制系统参数为:ε=1,τ=0.005,q=1/T=1000,预设滑动参数β
从附图4-5中可以看出,采用δ算子离散化后的电机控制系统是稳定可控的;其中,如图5所示,由于连续系统存在干扰,使得测量值x(0)存在误差,从而滑动超平面s(k)=c
本发明所述的驱动控制方法、系统及设备,使用采样原连续驱动系统得到离散化的系统,为了避免离散后系统发散,采用δ算子对原连续系统进行离散化,保证了离散驱动控制系统的稳定性,并且设计了离散滑模变结构控制系统,给出控制量的求解算法,保证离散驱动控制系统的无抖震性;滑模变结构控制作为一种能实现系统鲁棒控制的有效方法,以其对外部扰动良好的鲁棒性、快速的动态响应能力;滑模变结构控制本质是一种特殊的非线性控制结构,其非线性表现为控制的不连续性;该控制策略与其他控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中根据系统的当前状态有目的地变化,使系统按照预定的“滑动模态”的状态轨迹运动;本发明通过使控制系统稳定的控制参数的选取原则,设计了离散化的滑动超平面,使得电机驱动控制系统一开始就处于滑动模态附近,并根据此推导了离散驱动控制系统的输入方程,有效的保证系统的稳态控制能力,工程意义重大。
上述实施例仅仅是能够实现本发明技术方案的实施方式之一,本发明所要求保护的范围并不仅仅受本实施例的限制,还包括在本发明所公开的技术范围内,任何熟悉本技术领域的技术人员所容易想到的变化、替换及其他实施方式。
- 基于滑模变结构的移动机器人驱动控制方法、系统和设备
- 基于分时驱动的电子膨胀阀控制方法、系统及设备