一种气垫船自航模远程控制系统及控制方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及船舶设备技术领域,具体涉及一种气垫船自航模远程控制系统。
背景技术
自航模是无人船的一种,气垫船自航模是以气垫船为母型按相似性原理设计制造的自航模。对其进行研究的试验需对自航模型航行的运动规律及安全边界进行测试,从而获得自航模型在多种航行状态下,无约束情况下的六自由度运动状态和运动特性,验证拖曳水池模型试验的有关数据,是总体研究、分析实船运动特性的一种技术手段。
自航模运动的非线性让其进行仿真试验时,应尽量选择在开阔水域以获得相对真实的试验数据。因此,开阔水域对自航模远离岸基的远程操作控制提出了较高的要求。同时,对研制的气垫船自航模进行位置、航速、姿态、气垫压力、运动等参数需进行测试,对其垫升风机、推进电机、舵机、风门电机等重要设备需进行远程控制,远离岸基后,在保证数据长距离传输稳定性同时,大量的控制指令互换,对远程控制系统通信传输要求较高。
我国的自航模研究技术相对于发达国家起步较晚,技术相对薄弱。这种薄弱主要体现在自航模的自航模的设计水平及仿真试验环境等因素。对于仿真试验环境,国内对于自航模的研究大多基于有限室内水池,其有限的运动范围对于其控制的距离没有过高的要求。然而,随着自航模试验技术的发展,摆脱有约束的室内或室外水池进行仿真试验是发展的趋势,其远程控制方法显得尤为重要。国内无人船与岸基的通信可满足长距离传输的方式还是以第二代移动通信技术为主,虽然此种传输可远距离传输,但传输信息相对简单,无法满足复杂应用场景。本发明所涉及的自航模具备在开阔水域自由航行的能力,同时其远程控制方法运用新的通信技术手段,满足传输复杂数据指令实时传输的需求。
发明内容
本发明所要解决的技术问题在于,克服现有技术中存在的问题,提供一种气垫船自航模远程控制系统及控制方法。
为了解决上述问题本发明的技术方案是这样的:
一种气垫船自航模远程控制系统,包括陆上遥控系统和艇上控制系统,陆上遥控系统与艇上控制系统通过远距离无线通讯模块连接;
陆上遥控系统,包括指令操作系统、控制系统和无线通讯系统;
指令操作系统包括触摸屏、操控手柄;指令操作系统将操作者的指令送至控制系统;
控制系统包括一PLC,控制系统将操作指令转换成相应的操作变量,经CPU处理后再由一通讯模块送至无线通讯系统;
无线通讯系统包括网关、天线;无线通讯系统将操作指令和操作变量发送给艇上自动控制系统。
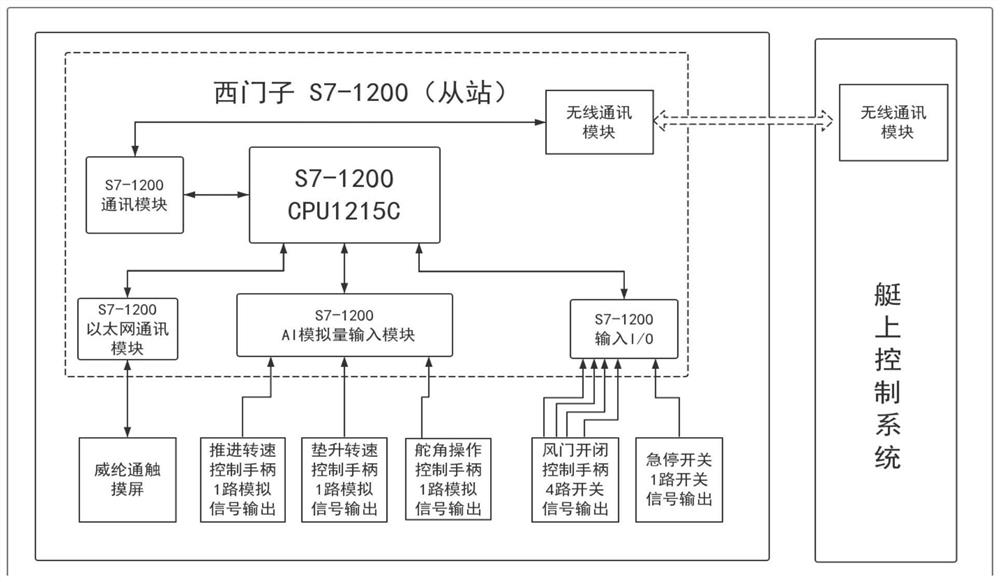
艇上控制系统,包括控制对象、信号采集、控制机构、信号处理系统和无线通讯系统;
无线通讯系统接收到的陆上控制指令并传输给信号处理系统;
信号处理系统包括一PLC,信号处理系统将接收到的指令信号进行处理,转换成为控制变量送到控制执行机构驱动控制对象完成指令动作。
电机控制采用PID调节控制,当转速给定值r(t)被送至PID调节控制器后,会输出控制信号u(t)给执行机构中的电机驱动器,然后驱动电机工作;通过转速反馈机构将被控变量值c(t)反馈给PID调节控制器,通过PID调节控制器将偏差值转换成补偿信号送至电机驱动器,驱动电机接近给定值;通过这个闭环控制系统来对被控变量进行控制,直至被控变量符合转速给定值。
积分分离PID控制算法需设定积分分离阀ε,当|e(k)|>ε时,即偏差值较大时,采用PD控制,以减少超调量,使系统有较快的响应。当|e(k)|≤ε时,即偏差值比较小时,采用PID控制,以保证能控制电机转速精度。离散化PID控制算式为:
其中,k为采样序号,k=0,1,2…n;Kp、Ki、Kd分别表示比例、积分、微分系数。经过数字PID调节整定后,在实际测试过程中,垫升风机和推进电机的给定转速和实际转速差值均符合设计要求的±20r/min,获得满意的控制效果。
有益效果:通过此套系统进行气垫艇自航模型试验技术研究,能补充完善气垫船总体技术设计的试验验证手段。对于控制要素较多的无人船远程控制设计也具有一定的参考价值。本发明已应用于某重要气垫船的总体研究,是分析母型实船运动特性的一种技术手段。此套控制系统适用性较强。
本套控制系统包含了无线通讯技术、模拟量控制技术、步进驱动控制技术、PID直流电机调速、PWM脉宽调制技术等多种工业控制技术,因此具有较强的适用性。这套控制系统可运用在无线(或有线)操控步进电机、直流电机、模拟量控制等多场景的工控系统中,并且调试参数开放、易于修改,稍有电气专业知识的技术人员即可快速掌握进行作业。
附图说明
下面结合附图和具体实施方式来详细说明本发明;
图1是本发明所述的陆上无线遥控系统框图。
图2是本发明所述的转速反馈控制系统原理框图。
图3是本发明所述的控制系统示意图。
图4是本发明所述的转速反馈控制系统原理框图。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本发明。
本控制系统的设计思想主要针对解决本船模在试验过程中会遇到问题,并考虑了控制系统在后续船模试验中的通用性问题。因此在设计时将着重从这两个方面出发考虑,以达到满意的试验效果。
对于控制系统的整体搭建,陆上远程控制系统通过无线数据通讯将操作指令传输给艇上自控系统,从而实现远距离控制船模。
本次方案中采用的远距离无线通讯系统本质上是一种4G移动网络的通讯技术。由于支持国际通用标准的FDD-LTE、TDD-LTE、WCDMA(HSPA+)、CDMA2000(EVDO)、TD-Scdma等3G/4G移动宽带网络制式,通信系统的传输速度最高可达到上行50Mbps下行100Mbps因此大大提高了传输速度。加密保护可以使发送方发送的消息内容不能被除目标接收方之外的第三方所获知,并且传输距离远,不受地域距离的影响。
陆上遥控系统,组成模块及连接关系见图1。
陆上无线遥控系统是由指令操作系统、控制系统和无线通讯系统3部分组成。指令操作系统由触摸屏、操控手柄等组成。主要是将操作者的指令送至控制系统。控制系统主要是由西门子的S7-1200系列的PLC组成。主要是将操作指令转换成相应的操作变量,经CPU处理后再由RS232通讯模块送至无线通讯系统。无线通讯系统是由ZP3000网关、4G天线组成。无线通讯系统再将操作指令和操作变量发送给艇上自动控制系统。
艇上控制系统,组成模块及连接关系见图2。
艇上自动控制系统是由控制对象、信号采集、控制机构、信号处理系统和无线通讯系统组成。无线通讯系统将接收到的陆上控制指令传输给信号处理系统。信号处理系统主要是由西门子的S7-1200系列的PLC组成。它将接收到的指令信号进行处理,转换成为控制变量送到控制执行机构驱动控制对象完成指令动作。
图3是本发明所述的控制系统示意图。由于船模需要在开阔的水域才能按指令完成试验规定动作,并且试验水域无法敷设线缆,因此在对控制系统的整体设计搭建时就优先考虑采用无线通讯技术。陆上远程控制系统通过无线数据通讯将操作指令传输给艇上自控系统,从而实现远距离控制船模。
由于垫升电机和推进电机在船模试验过程中必须按给定的转速值保持稳定运转,要求实际转速与给定转速相差±20r/min,这就是一种典型的过程控制系统。现如今,大部分的过程控制系统主要仍采用PID控制策略,这是因为这种控制具有直观、实现简易和鲁棒性能良好等一系列优点。因此本次控制系统的电机控制部分就采用PID控制。
参看图4,当转速给定值r(t)被送至PID调节控制器后,会输出控制信号u(t)给执行机构中的电机驱动器,然后驱动电机工作。通过转速反馈机构将被控变量值c(t)反馈给PID调节控制器,通过PID调节控制器将偏差值转换成补偿信号送至电机驱动器,驱动电机接近给定值。通过这个闭环控制系统来对被控变量进行控制,直至被控变量符合转速给定值。
在本次转速反馈控制系统中采用了数字PID调节控制系统,目的是为了消除转速差,提高电机转速稳定性。以避免在电机运转过程的开始、结束或大幅增加转速设定值时,引起系统较大的超调,甚至振荡,这对于垫升电机、推进电机的运行来说是很不利的。因此当电机在运行过程中若因为积分校正而对控制系统动态性能造成影响,就需要采用积分分离PID控制了。当电机的实际转速与设定转速的误差小于一定位值时,再恢复积分校正环节,以便消除系统的稳态误差。
积分分离PID控制算法需设定积分分离阀ε,当|e(k)|>ε时,即偏差值较大时,采用PD控制,以减少超调量,使系统有较快的响应。当|e(k)|≤ε时,即偏差值比较小时,采用PID控制,以保证能控制电机转速精度。离散化PID控制算式为:
其中,k为采样序号,k=0,1,2…n;Kp、Ki、Kd分别表示比例、积分、微分系数。
经过数字PID调节整定后,在实际测试过程中,垫升风机和推进电机的给定转速和实际转速差值均符合设计要求的±20r/min,获得满意的控制效果。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明专利要求保护的范围由所附的权利要求书及其等同物界定。
- 一种气垫船自航模远程控制系统及控制方法
- 一种全垫升气垫船的安全限界控制方法以及基于安全限界的应急工况控制方法