具有可拆卸手柄的瓣环成形环组合件
文献发布时间:2023-06-19 11:26:00
相关申请的交叉引用
本申请要求享有2018年11月1日提交的美国申请号62/754,070的权益,出于所有目的,该申请的全部内容通过引用并入本文。
本申请与2018年11月1日提交的题为“包括具有挠性轴的环保持器的瓣环成形环组合件(Annuloplasty Ring Assembly Including a Ring Holder with a FlexibleShaft)”的美国申请号62/754,091相关;以及与2018年11月1日提交的题为“用于心脏瓣膜修复和置换的带有致动器的植入物保持器组合件(Implant Holder Assembly withActuator for Heart Valve Repair and Replacement)”的美国专利申请号62/754,066相关,出于所有目的,将这两个申请的全部内容通过引用并入本文。
技术领域
本公开总体涉及医疗设备以及用于递送这种医疗设备的工具。更具体地,本公开涉及对具有畸形和/或功能不良的天然心脏瓣膜的外科修复。
本发明的实施方式涉及用瓣环成形环促进心脏瓣膜的修复的可拆卸手柄以及利用这些手柄植入瓣环成形环的方法。
背景技术
首先参考图1,人的心脏通常被分成四个泵送腔室,这些泵送腔室泵送血液贯穿身体。每个腔室都提供有它自己的单向出口瓣膜。左心房从肺部接收含氧血液,并通过二尖瓣(或二尖瓣(bicuspid))将含氧血液推进至左心室。左心室从左心房收集含氧血液,并将它通过主动脉瓣推动到主动脉,然后含氧血液在主动脉被分布到身体的其它部位。然后,来自身体的缺氧血液在右心房被收集,并通过三尖瓣被推进到右心室。然后,右心室推进缺氧血液通过肺动脉瓣和肺动脉到达肺部,以再次给血液提供氧气。
与心脏的腔室相关的每个瓣膜都是单向瓣膜,这些瓣膜具有小叶,以控制血液通过心脏的定向流动,并防止血液回流进入其它腔室或处于特定腔室上游的血管中。瓣膜各自由具有致密的纤维环的瓣环支撑,致密的纤维环直接或间接附接到心房或心室肌纤维。
当瓣膜变得患病或损伤时,心脏的效率和/或一般功能可能受损。患病的心脏瓣膜可分为狭窄的(其中瓣膜无法充分打开以允许足够的正向血流通过瓣膜)和/或功能不全的(其中瓣膜无法完全关闭),从而导致当瓣膜关闭时,过多向后的血流通过瓣膜。如果不及时治疗,瓣膜疾病会是严重虚弱,且甚至是致命的。
各种外科技术可用于修复患病或损伤的瓣膜。一种已显示在治疗功能不全方面有效的修复技术是瓣环成形术,其中通过围绕心脏瓣环的全部或一部分固定修复区段(如瓣环成形环),来改变瓣环的有效尺寸和/或形状。例如,瓣环可通过将假体瓣环成形环附接到瓣环周围的心脏的内壁而收缩。瓣环成形环被设计用于支持在心动周期期间发生的功能变化,维持对合和瓣膜完整性,以防止倒流,同时在正向流期间允许良好的血液动力学。
瓣环成形环一般包括内部基底,其通常由金属(如不锈钢、钛或镍钛诺)或挠性材料(如硅橡胶或Dacron绳)形成,该基底一般被生物相容性织物或布覆盖形成缝制套箍,以允许将环缝合到心脏组织。取决于特定的应用,瓣环成形环可以是刚性的或挠性的,可以是裂开的(包括至少中途围绕瓣环延伸的环)或连续的,并且可以具有多种形状(包括圆形、D形、C形、鞍形、和/或肾形)。实例可见于美国专利号5,041,130、5,104,407、5,201,880、5,258,021、5,607,471、6,187,040和6,805,710,其全部内容通过引用整体并入本文。许多瓣环成形环形成在平面中,但一些环通常是非平面的。这样的非平面环可以是鞍形的、和/或沿着各个部分弯曲(如沿着其前侧或笔直侧弯曲),以符合该位置处的瓣环的期望形状。
在通常的二尖瓣瓣环成形环植入物程序中,首先分开的植入物缝线的阵列成圈,以彼此等距隔开的间隔(如,例如4-mm间隔)通过全部或部分暴露的二尖瓣环。然后,外科医生以更紧密隔开的间隔(如,例如2-mm),将植入物缝线穿线通过瓣环成形环。这发生在身体外部的假体上,该假体一般被固定到保持器或模板的外周边缘部分。然后,将保持器上的环沿预锚定的植入物缝线阵列向远侧推进(降落),使其与瓣环接触,因此实现瓣膜瓣环周长的减小。在这一点上,为了外科区域的更大可见性,用于操纵保持器或模板的手柄可以是可拆卸的。外科医生系住环近侧的植入物缝线,并一般通过在一系列切割引导器上切断连接缝线,将环从保持器或模板上释放。瓣环成形环植入物程序的实例在美国专利号8,216,304和8,152,844中进行了描述,其全部内容通过引用整体并入本文。
市场上当前的二尖瓣修复环具有保持器系统,该保持器系统利用卡扣部件(snap-in feature)以将其手柄锁定在保持器中。尽管使用卡扣部件可以方便地将手柄最初附接到保持器,但是在植入期间可能难以将手柄与保持器分离,特别是如果假体已经降落到环。对于当前的系统,通常在植入期间将手柄与保持器本身一起移除。但是,在一些情况下,可能期望将保持器留在适当位置,直到所有结都被系扎,同时移除手柄用于更好的进入/更少的阻塞。这对于挠性带和环可能尤其重要,因为将保持器附接到假体以限定其形状,同时将其系扎到瓣环可能是有益的。同样,对于微创外科(MIS)程序,可能期望在将缝线放入植入物中的同时将手柄附接到植入物,且然后能够在保持器附接并使用MIS仪器降落植入物的同时移除手柄。
当前一些用于二尖瓣修复环的保持器具有位于长杆(约5cm;约2英寸)的端上的卡扣配合(snap-fit)机构,用于将手柄附接到植入物保持器。即使移除手柄,仍然有将近5-cm(约2英寸)长的杆附接到无法移除的保持器,从而阻碍了在植入期间进入环的整个圆周。另一个问题是许多现有的保持器相对于植入物以预定的角度附接。该角度可能很好地适合于一种外科方法(如全胸骨切开术),但不太适合于程序(如右胸廓切开术)。
鉴于以上所述,将期望具有二尖瓣修复植入物保持器,该保持器允许在程序期间的任何时间独立于该保持器而允许手柄是可附接的且然后被快速且容易地拆卸。移除手柄允许更好地接近假体用于系扎结,并与微创外科程序更好地兼容。一旦移除手柄,也将期望具有最小的保持器轮廓,替代两英寸的杆。还将期望具有用于二尖瓣环的保持器系统,该保持器系统将具有将手柄附接在多个位置的选项,这些选项将适合于不同的外科方法(如胸骨切开术或胸廓切开术)。
当前的保持器系统还包括可重复使用的定径器(sizer)套件和托盘(tray),以考虑到天然瓣环的适当尺寸。因此,外科医生经常提供有定径器头部的托盘,定径器头部的托盘具有的周长形状和尺寸与将被植入的瓣环成形环的周长形状和尺寸相似。最适合天然瓣环的那个用于选择适当的瓣环成形环。然而,由于在定径程序期间需要使用额外的器械,因此使用的定径瓣环的当前方法效率低下并且笨拙。对于定径瓣环的尺寸或通过最小尺寸的切口递送植入物的程序尤其如此。此外,对定径器或托盘的任何更改都需要进行许多验证。定径器和手柄套件必须在程序之前进行消毒,以及然后送到手术室,这会给误差留出空间。
鉴于上述情况,将期望具有模块化系统,该模块化系统使用相同的手柄来进行定径和环植入。这将为外科医生提供用于定径和植入瓣环成形环的有效率的过程。还期望具有用于二尖瓣环或带的可立即使用的保持器和定径器系统,该系统可以使用一次性手柄用于定径和植入。定径器头部也可以是一次性的,以避免与新的可重复使用的定径器头部托盘相关的昂贵的包装验证。
发明内容
在本发明的一个实施方式中,具有可拆卸手柄的瓣环成形环组合件包括被配置以固定至心脏瓣膜的瓣环的瓣环成形环和瓣环成形环保持器。瓣环成形环可移除地附接到环保持器并且沿着环保持器的外周边缘部分的下表面共形接触。手柄接合器(adapter)从环保持器的上部近侧面向近侧延伸,并且手柄接合器在一侧被附接或可附接到手柄的远侧附接端,并且在另一侧可移除地附接到瓣环成形环保持器。在一个优选的实施方式中,环保持器的上部近侧面形成开口,并且手柄接合器位于环保持器的开口中。另外,手柄接合器通过缝线可移除地附接到环保持器。
在一个实施方式中,手柄接合器被包覆模制(overmolded)到手柄的远侧附接端。在另一个实施方式中,手柄的远侧附接端和手柄接合器各自带有螺纹用于协作接合。在另一个实施方式中,手柄的远侧附接端和手柄接合器形成接合的卡扣,以将手柄固定到手柄接合器。
在另一个实施方式中,手柄接合器具有两个附接位置,并且手柄的远侧附接端可以选择性地附接到每个附接位置。手柄的远侧附接端和手柄接合器的两个附接位置中的每一个可以带有螺纹用于协作接合。可选地,手柄的远侧附接端和手柄接合器的两个附接位置中的每一个形成接合的卡扣,以将手柄固定到手柄接合器。
在另一个实施方式中,瓣环成形环组合件进一步包括一组定径器头部。每个定径器头部具有定径器接合器,该定径器接合器可移除地附接到手柄的远侧附接端。每个定径器头部的定径器接合器与手柄的远侧附接端形成接合的卡扣,以将手柄可逆地固定到定径器头部。
在另一个实施方式中,手柄接合器通过缝线可移除地附接到环保持器,并且环保持器进一步包括从环保持器的上部近侧面向上突出的切割槽(cutting well)。缝线横跨切割槽布置,并且易用于切割以将手柄接合器从环保持器释放。优选地,环保持器具有低矮轮廓,使得切割槽是从环保持器的上部近侧面的最大突出部。
在另一个实施方式中,瓣环成形环组合件包括瓣环成形环、瓣环成形环保持器、具有远侧附接端的手柄以及从环保持器的上部近侧面向近侧延伸的手柄接合器。手柄接合器具有两个附接位置,并且手柄的远侧附接端可以选择性地附接到每个附接位置。优选地,手柄的远侧附接端和手柄接合器的两个附接位置中的每一个带有螺纹用于协作接合。
其它实施方式提供了使用本文公开的保持器或瓣环成形环组合件在需要其的患者中递送和植入瓣环成形环的方法。
附图说明
通过使用附图对实施方式的描述,本发明的进一步特征和优点将变得明显。在附图中:
图1是人心脏的示意性横截面图;
图2是瓣环成形环组合件的第一实施方式的分解立体图;
图3是图2的瓣环成形环组合件的组装的俯视立体图;
图4是图2的瓣环成形环组合件的组装的侧视图;
图5是图4的瓣环成形环组合件的环保持器的横截面图;
图6是图2的瓣环成形环组合件的组装的仰视立体图;
图7是瓣环成形环组合件的第二实施方式的分解立体图;
图8是瓣环成形环组合件的第三实施方式的分解立体图;
图9是图8的瓣环成形环组合件的组装的立体图;
图10是图8的手柄末端和定径器头部的分解的俯视立体图;
图11是图10的手柄末端和定径器头部的组装的俯视立体图;
图12是图10的手柄末端和定径器头部的分解的仰视立体图;
图13是瓣环成形环组合件的第四实施方式的分解立体图;
图14是图13的瓣环成形环组合件的组装的立体图,其中手柄处于第一附接位置;
图15是图13的瓣环成形环组合件的组装的立体图,其中手柄处于第二附接位置。
具体实施方式
参考图2至图6,瓣环成形环组合件10的实施方式包括瓣环成形环12、环保持器14、手柄接合器16和手柄18。在该实施方式中,瓣环成形环12是C形的并且在一侧开口。瓣环成形环可具有通常刚性或挠性的芯(未示出),该芯被外覆盖物62(如覆盖有编织聚酯织物的硅酮橡胶的层或管)围绕。
环保持器14由上部近侧面20、外周边缘部分22和从外周边缘部分22的一侧延伸到另一侧的横杆24限定。外周边缘部分22在平面图中具有与设计用来保持的瓣环成形环相同的形状。在外周边缘部分22和横杆24之间,环保持器14提供了一对相对大的可见性窗口26,其一起占据了外周边缘部分内的大的横截面积。窗口26允许外科医生通过环保持器14和瓣环成形环向远侧观看,以评估当环被植入时瓣环和心室结构的状况。
切割槽28在横杆的窄端处从环保持器的近侧面20向上突出。切割槽28的壁30邻近外周边缘部分22定位并且从近侧面20向上延伸。在每个壁30的上边缘上提供凹口32。凹口32提供了方便的桥,连接缝线(一根或多根)(未示出)被悬挂横跨该桥。在壁30之间是间隙34,以提供用于缝线切割器械的空间。壁30呈现出可以被利用的一种切割槽的构型,并且当然可以构想其它构型。
环保持器14还包括一系列用于缝线通过的通孔36,用于将瓣环成形环12牢固地保持到环保持器14。应当理解,尽管通孔是优选的构造,但是可以构想提供通过环保持器的通道和/或执行类似功能的其它构型。还将理解的是,在植入程序期间用于保持瓣环成形环和环保持器的缝线应被附接到环保持器,以确保在将瓣环成形环递送到天然瓣环后,将那些缝线与环保持器一起移除。缝线布线的实例在美国专利号8,152,844中描述,其内容通过引用整体并入本文。
参考图5和图6,瓣环成形环与环保持器14的成角度的通道38共形,该成角度的通道38由大体轴向延伸的远侧壁40和形成外周边缘部分22的外部范围的向外延伸的近侧凸缘42限定。瓣环成形环固定在通道的内部和周围并遵循三维路径,并且外周边缘部分22和通道38反映该三维形状。
为了从保持器14上移除瓣环成形环12,外科团队的成员将切割将环12保持至保持器14的固位缝线。将手术刀或其它切割器械穿入切割槽28的间隙34中以切割固位缝线。通过固位缝线的切割,保持器14可以从瓣环成形环12牵拉远离。注意,在示例性实施方式中,固位缝线经由结或其它约束件连接至保持器14,使得当切割固位缝线时,其切断端将保持连接至保持器14。因此,当切割固位缝线并且将保持器14从环12牵拉远离时,固位缝线将与保持器14一起从环12移除。
横杆24在靠近切割槽28的端的宽度窄,而横杆在相对端的宽度宽并限定了用于接收手柄接合器16的开口48。围绕开口48的是用于将手柄接合器16固定到环保持器14的多个缝线孔46。
手柄接合器16具有四个壁——前壁52、两个侧壁54和后壁56。孔60形成在手柄接合器的顶表面中。孔延伸到手柄接合器16中以接收手柄18,并且可以在底端打开或关闭。孔60具有带螺纹的上部64和不带螺纹的下部(未示出)。孔的下部的直径小于孔的上部的直径。
缝线突片66从手柄接合器16的每个侧壁54延伸。每个缝线突片66具有上部凹槽68以接收缝线70。从前壁突出的是由两个彼此隔开的壁74形成的切割槽72。每个壁的顶部具有用于接收缝线的凹槽76。
手柄18在其远端具有导入部分80。导入部分80旁边是螺纹部分82,其具有大于导入部分的直径。通过将手柄18穿入手柄接合器中几圈,将其组装到手柄接合器16。导入部分80具有与手柄接合器16的孔60的下部相似的直径,以确保螺纹的轴向对准,从而大大减少了错扣的发生和可能的颗粒产生。优选地,手柄18具有可延展的轴,其可以是不锈钢、铝、镍钛诺或一些其它可延展的材料。
通过将手柄接合器16的远端插入到环保持器14的开口48中,将组合的手柄18和手柄接合器16组装到环保持器14。将手柄接合器插入到开口48中,直到缝线突片66和切割槽72抵靠环保持器14的近侧表面20停止。
参考图3,缝线70将手柄接合器16保持到环保持器14。例如,通过使缝线穿过壁74中的孔或孔口78并系扎结以将缝线固定到壁,来将缝线70的一端固定到手柄接合器16的切割槽72的一个壁74。然后可以将缝线穿越切割槽72,并放置在壁74的凹槽76中。然后,缝线沿着切割槽72的相邻壁74向下穿过,并通过环保持器14中的缝线孔46进行布线。然后,缝线70沿着环保持器的底部穿过,到达手柄接合器16的侧壁54中的缝线突片66的前部下方的位置。然后缝线通过环保持器中的缝线孔46并向上并穿越缝线突片66进行布线。然后返回向下通过环保持器并横跨到手柄接合器的另一侧,在该侧上,缝线相似地穿过缝线孔,穿越相对的缝线突片,向下通过环保持器,并向上返回到切割槽,在切割槽处其被系住。可选地,缝线可以仅被固定在切割槽72处,而不越过缝线突片66(例如,通过向下穿过与一个壁74相邻的孔46,然后在切割槽72的下方,并向上返回到环保持器并与另一壁74相邻而被系住)。
切割单根缝线70允许通过将手柄18和带螺纹的接合器16从环保持器牵拉远离而将它们从环保持器14释放。缝线70保持附接到接合器16,并且瓣环成形环保持附接到环保持器。移除手柄18允许更好地使用植入物的缝合环,从而使得更容易系紧植入物缝线。同时,保持器14保持附接到植入物,从而有助于在系紧期间维持其形状。在挠性植入物的情况下,这可以是特别重要的,在挠性植入物的情况下,期望维持植入物的形状,直到其完全被固定到瓣环。
可以在将瓣环成形环降落到瓣环之后,或在将瓣膜降落到瓣环之前的微创外科(MIS)程序中,完成单根缝线70的切割。在移除手柄和/或接合器的情况下,可以用MIS或机器人器械抓住保持器,以用最小化切口来促进外科技术。如在图2中可以看到的,在移除接合器16的情况下,环保持器14具有非常低的轮廓,从而允许更容易地进行工具操作和更好的可视性。保持器14可以保持附接到植入物12,直到所有缝线都被系扎以确保植入物在植入期间保持其期望的形状。这对于挠性植入物特别重要。移除手柄和/或接合器后,允许360度接近植入物,用于系扎结并验证放置。然后可以通过切割横跨保持器14的切割槽28的任何缝线将环保持器14从瓣环成形环12移除。还应注意,可以将缝线防护装置结合到手柄接合器16中,该缝线保护装置覆盖图3中所示的缝线切割间隙34,以防止在切割缝线70以释放手柄18之前首先切割该缝线。美国专利申请公开号2018/0116795中公开了缝线防护装置的实例,其全部内容通过引用整体并入本文。
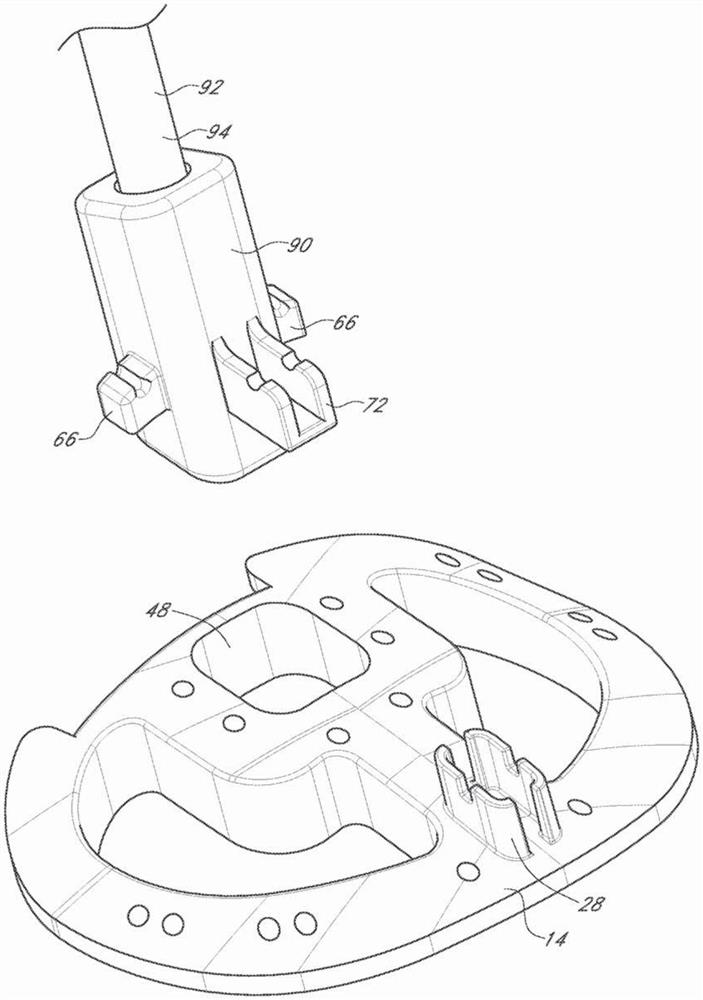
在图7中所示的可替代的实施方式中,手柄接合器90具有一次性的、预先附接的手柄92,在植入程序期间,手柄92可以容易地从环保持器14移除。该实施方式还保留保持器14附接到瓣环成形环12用于植入物系紧以维持其形状。在该实施方式中,手柄接合器90的长度可以被延伸。特别地,手柄接合器90的在缝线突片66和切割槽72上方的部分具有比先前实施方式中更大的长度。然后可以将手柄接合器90包覆模制到具有可延展的轴94的手柄92的远端上,该可延展的轴94由诸如不锈钢、铝、镍钛诺或其它合适的材料制成。包覆模制部件是廉价的,并且避免了在制造期间验证粘合剂粘结步骤的困难。如在先前的实施方式中一样,接合器90的远端被插入到环保持器14的开口48中,以及然后经由可以被切割以移除手柄和接合器的单根缝线在切割槽72处被附接到环保持器14。
参考图8至图9,瓣环成形环组合件100的另一实施方式包括环保持器114、手柄接合器116和手柄末端118。环保持器114与前述实施方式中的相同。手柄接合器116具有如先前实施方式中的四个壁,但是在这种情况下,具有行进通过其的矩形孔120。矩形孔的上部限定了一对相对的斜面122。如在先前的实施方式中一样,手柄接合器在侧壁上具有缝线突片124,并且在前壁上具有切割槽126。在这种情况下,切割槽的壁的顶表面128与限定矩形孔120的顶表面130对准。
手柄末端118是具有上部136和底部138的矩形构件。在矩形构件的端之间居中的肩部140将上部和下部分开。孔142通过手柄末端118的顶表面144延伸到上部中,以接收手柄92的轴94。像先前实施方式中的轴一样,轴94优选地是可延展的材料(如不锈钢、铝或镍钛诺)。可延展的轴在一端可被包覆模制至手柄末端,且在另一端可被包覆模制至手柄把手。
底部包括邻近肩部140的实心块150,然后以实心H形向下延伸,形成一对通道152。从实心块150延伸的挠性臂154位于每个通道中。挠性臂154的远端具有向外突出的卡扣结构158,该卡扣结构158形成斜面160和止挡件162。每个挠性臂154与实心H形间隔开以允许向内挠曲,足以致动卡扣功能。止挡件162优选地是垂直于手柄末端轴线的平坦表面。
通过将手柄末端118插入到手柄接合器116的矩形孔120中来组装实施方式。挠性臂154的斜面160接合手柄接合器116的孔120的上部的相对的斜面122,以使臂154向内挠曲。在手柄末端118穿过孔120之后,臂154向外挠曲回,并且止挡件162接合手柄接合器116的底表面170,而肩部140接合手柄接合器116的顶表面172以将手柄末端118固定在适当位置。如先前实施方式中所述,手柄接合器通过单根缝线固定到环保持器。
优选地,底表面170平行于止挡件162的平坦表面。这样,手柄末端118和手柄接合器116的卡扣配合部件被设计成不可逆的,并且由于与将环降落到瓣环或调节其位置相关联的力,植入物不能从手柄无意中“弹出(pop off)”。相反,通过切割单根缝线将手柄、手柄末端118和手柄接合器116从植入物保持器114移除。如在先前的实施方式中一样,缝线保持附接到接合器。移除手柄允许更好地使用植入物的缝合环,因此使系紧植入物缝线更加容易。同时,保持器114保持附接到植入物,从而在系紧期间帮助维持其形状。在挠性植入物的情况下,这可以是特别重要的,在挠性植入物的情况下,期望维持植入物的形状,直到将其完全固定到瓣环。
一旦瓣环成形环的系紧完成,就在环保持器114的切割槽28处切割缝线,以从瓣环成形环释放和移除环保持器。如上所述,可以将缝线防护装置结合到手柄接合器116中,该缝线防护装置覆盖在切割槽28处的缝线切割位置,以防止在72处切割缝线70以释放手柄之前首先切割该缝线。
瓣环成形环有多种尺寸,且对于外科医生来说,选择最适合天然瓣环的尺寸是重要的。为这个目的,提供了定径器头部的托盘(未示出)。参考图10至图12,定径器头部300具有外周302,该外周302大体的形状与瓣环成形环相同。对于定径器头部的托盘,提供了几种具有不同外周形状的定径器头部。在选择正确的定径器头部300时,外科医生选择与瓣环形状匹配的那个。每个定径器头部还提供从定径器头部的顶部突出的定径器接合器304。定径器接合器304具有四个壁和行进通过其的矩形孔306。矩形孔306的上部在孔的顶部限定一对相对的斜面308。孔的下部还具有带有斜面312的相对的凹部310。接合器304可以与定径器头部300被模制在一起或作为单独的部分进行附接。
与手柄接合器116(参见图8)一起使用的相同手柄末端118可以与定径器头部300一起使用。此处的区别在于,在孔306下部的斜面312形成成角度的释放斜面312(参见图12),以允许定径器头部300的释放。
为了将手柄末端118附接到定径器头部300,将手柄末端118插入接合器304的孔306中。挠性臂154的斜面160接合孔306的相对的斜面308以使臂154向内挠曲。在手柄末端118穿过孔306之后,臂154向外挠曲回,并且止挡件162接合定径器头部300的成角度的释放斜面312,以将手柄末端118和定径器头部300保持在一起。为了移除定径器头部,将手柄末端118沿相反的方向牵拉回。定径器头部可逆地附接到手柄末端,因为释放斜面312将保持定径器头部,直到将足够的力施加到手柄末端以使臂154偏转穿过释放斜面312。可以通过改变释放斜面的角度来优化从手柄末端释放定径器头部所需的力的量。
在使用期间,外科医生会选择第一个定径器头部进行尝试。然后,外科团队的成员将那个定径器头部附接到手柄末端。如果外科医生期望尝试使用不同尺寸,则将第一个定径器头部移除,以及使用相同程序附接下一个头部。重复此过程,直到外科医生确定正确的尺寸。定径器头部可以容易地被附接和拆卸,从而允许外科医生尝试各种不同的定径器头部,直到确定正确的尺寸。
因此,描述了用于二尖瓣瓣环成形环的定径器和植入物保持器系统,该系统带有一组一次性定径器头部、具有可延展轴的一次性手柄、以及附接到瓣环成形环的兼容环保持器。手柄末端和定径器头部的卡扣配合结构被设计为可逆配合。通过这种方式,外科医生可以在手柄末端通过简单地将一个牵拉下并卡扣上另一个来逐个尝试若干不同的定径器头部。手柄将带有完整范围的定径器头部。手柄也可以附接到图9的环保持器,并通过切割单根缝线而释放。这使得保持器附接到植入物以用于植入物系紧,从而维持其形状。
参考图13至图15,瓣环成形环组合件200的另一实施方式包括环保持器214、手柄接合器216和手柄218。环保持器214和手柄218与第一实施方式中的相同。
手柄接合器216从环保持器214向上突出并形成第一螺纹孔220和第二螺纹孔222。孔具有不平行的轴线。每个孔可在底部包括导入部分(未示出),该导入部分有助于确保手柄218和接合器216之间的轴向对准并因此防止螺纹错扣。而且,制造螺纹,使得可以以仅需要约1-2次完整旋转来附接手柄。
手柄接合器216允许手柄218被附接在两个不同位置之一中,一个理想地适合于胸骨切开术,而另一个理想地适合于胸廓切开术。相对于二尖瓣环的平面,这两种外科方法具有非常不同的成角,且因此需要能够满足任何一种需求的保持器。
对于胸骨切开术,手柄相对于植入物的平面成一定角度地位于第一螺纹孔220中,以帮助抵消二尖瓣瓣环和胸骨切开术的进入之间的角度(图14)。对于胸廓切开术,二尖瓣瓣环通常是从切口的“直射(straight shot)”,并因此期望手柄和瓣环成形环之间的轴向对准(图15)。
注意,尽管在所示的图中,两个孔位于同一平面中,但它们可能是非平面的。例如,孔中的一个或两个可被倾斜,如果其可以导致更好的对准。尽管由于植入物的尺寸,两个孔是更可行的,但也可能会有多于两个的位置。
如在先前的实施方式中一样,手柄接合器216是单独的部分,其通过将手柄接合器216的远端插入到环保持器214的开口(未示出)中来组装,并且通过切割单根缝线可从环保持器214移除。对于挠性瓣环成形环,可能期望保持环保持器附接到瓣膜成形术环,直到所有缝线都被系扎以确保维持期望的形状。在那些情况下,这将有助于能够容易地移除手柄,用于在保持保持器附接的同时更好的使用和可视性。在可替代的实施方式中,手柄接合器216可以与环保持器214作为整体零件一体制成。
在其它可替代实施方式中,也可以将与来自以上讨论的不同实施方式的各种不同部件组合在单个经修改的环保持器中。为了此描述的目的,本文描述了本公开的实施方式的某些方面、优点和新颖特征。所公开的方法、装置和系统不应以任何方式解释为限制性的。相反,本公开单独地并且以彼此的各种组合和子组合来针对各种公开的实施方式的所有特征和方面。该方法、装置和系统不限于任何特定方面或特征或其组合,所公开的实施方式也不要求存在任何一个或多个具体优点或待解决的问题。
尽管为了方便呈现,以特定的顺序次序描述了所公开的实施方式中的一些的操作,但是应当理解,除非下文阐述的具体语言要求特定的次序,否则这种描述方式包含重新排列。例如,在一些情况下,顺序描述的操作可以被重新排列或同时执行。此外,为了简单起见,附图可能未示出可以将所公开的方法与其他方法结合使用的各种方式。另外,描述有时使用如“提供”或“实现”的术语来描述所公开的方法。这些术语是所执行的实际操作的高级抽象。对应于这些术语的实际操作可以根据特定实施方案变化,并且本领域普通技术人员容易辨别。
鉴于本公开的原理可应用到的多种可能的实施方式,应当认识到,所示例的实施方式仅是优选实例,并且不应被视为限制本公开的范围。确切地说,本公开的范围由所附权利要求限定。
- 具有可拆卸手柄的瓣环成形环组合件
- 人工二尖瓣成形环输送器及人工二尖瓣成形环输送系统