无线高精度远距离室外定位系统
文献发布时间:2023-06-19 11:26:00
技术领域
本发明涉及室外无线定位技术领域,尤其涉及无线高精度远距离室外定位系统。
背景技术
经检索,中国专利号CN105427549A公开了一种基于GPS的定位系统及方法,该发明虽然能够实现人员定位,但其定位精度不高,而且系统易受外界干扰;定位系统是以确定空间位置为目标而构成的相互关联的一个集合体或装置;目前的常见的定位系统主要采用GPS(Global Positioning System)、北斗系统、电子标签、Wifi、红外线、超声波和WaveLAN等方式,其中GPS和北斗系统,虽然定位范围大,但定位精度不高(米级);而电子标签和Wifi,虽然定位精度相对较高,但其定位范围较小,而且GPS、北斗系统、电子标签和Wifi的定位信号容易受外界因素干扰;随着人工智能技术的不断发展,人们对物体精确化的定位要求也随之提高;因此发明出一种无线高精度远距离室外定位系统变得尤为重要。
现有的远距离室外定位系统,大多采用GPS和北斗系统进行位置确定,虽然GPS和北斗系统定位范围大,但定位精度不高,只能达到分米级别,而且其定位信号容易受外界因素干扰;为此,我们提出无线高精度远距离室外定位系统。
发明内容
本发明的目的是为了解决现有技术中存在的缺陷,而提出的无线高精度远距离室外定位系统。
为了实现上述目的,本发明采用了如下技术方案:
无线高精度远距离室外定位系统,包括定位标签、基站一、基站二、基站三、交换机模块和上位机模块;
其中,所述定位标签设置于被测物体上,所述定位标签包括标签主控单元、标签UWB单元、无线通信单元一串口转换单元一和标签供电单元;所述基站一、基站二和基站三设置于定位空间内预设位置,所述基站一、基站二和基站三均包括有基站主控单元、基站UWB单元、无线通信单元二和串口转换单元二;所述上位机模块包括定位引擎单元、地图编辑单元和可视化现实单元;所述标签主控单元和基站主控单元均具体为STM32F103T8U6芯片;所述标签UWB单元和基站UWB单元均具体为DWM1000芯片;所述串口转换单元一和串口转换单元二均具体为MAX3232串口转换芯片。
进一步地,所述标签主控单元用于控制定位标签的运行、复位和启闭;所述标签UWB单元用于以脉冲方式重复不断的发送数据帧,所述无线通信单元一用于将数据帧通过无线传输方式分别发送给基站一、基站二和基站三;所述串口转换单元以用于通过上位机对定位标签进行设置和更新;所述标签供电模块用于为定位标签进行供电。
进一步地,所述基站主控模块用于控制基站一的运行、复位和启闭;所述基站UWB单元用于接收无线通信单元一发送的数据帧,并测量数据帧到达基站一的时间,形成时间差数据一;所述无线通信二单元用于将时间差数据一发送至交换机模块;所述串口转换单元二用于通过上位机对基站一进行设置和更新;所述基站二用于通过内置基站UWB单元接收数据帧,同时测量数据帧到达基站二的时间,形成时间差数据二,并发送至交换机模块;所述基站三用于通过内置基站UWB单元接收数据帧,同时测量数据帧到达基站三的时间,形成时间差数据三,并发送至交换机模块。
进一步地,所述交换机模块用于将时间差数据一、时间差数据二和时间差数据三进行数模转换,并上传至上位机模块;所述定位引擎单元用于接收经过数模转换后的时间差数据一、时间差数据二和时间差数据三,并利用TDOA算法进行计算,得到定位标签位置;所述地图编辑单元用于将定位标签位置和电子地图进行结合和标注;所述可视化显示单元用于将结合和标注后的定位标签位置进行可视化展示。
进一步地,所述TDOA算法具体为卡尔曼滤波和Chan算法的融合;所述卡尔曼滤波运算过程如下:
(1)状态预测,其方程如下:
(2)误差协方差预测,其方程如下:
(3)卡尔曼增益,其方程如下:
(4)状态更新,其方程如下:
(5)误差协方差更新,其方程如下:
式中:B表示应用于控制向量U
所述Chan算法公式如下:
X=A
ad
式中:d
*A*B-1,b=B
进一步地,所述DWM1000芯片主要包括模拟接收机、模拟发射机、锁相环/时钟发生器、数字收发机、电源管理模块、主机接口/SPI和状态控制器;所述STM32F103T8U6芯片主要包括7个定时器、2个ADC和9个通信接口。
相比于现有技术,本发明的有益效果在于:
1、本发明采用UWB技术作为该定位系统的核心技术,其具有低功耗,低成本、数据传输速度快,而且工作频段涵盖范围广,脉冲持续时间短,带宽很宽,并且具有较高的时间分辨率和很强的抗多径干扰能力;相较于传统的GPS和北斗系统,本发明定位系统能够实现厘米级的精确定位;而且不易受到外界干扰,适用于港口运输、应急管理、生产制造和人员追踪等多领域;并且本发明采用DWM1000芯片作为UWB技术数据帧的收发硬件,该芯片不仅低功耗,而且占用较少的空间尺寸,有利于降低本发明的成本;
2、本发明采用卡尔曼滤波和Chan算法的融合TDOA算法进行定位计算,相较于传统的RSS、AOA和TOA定位算法,该融合算法能够降低系统计算误差,有利于提高定位系统在室内恶劣环境下的定位精度。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
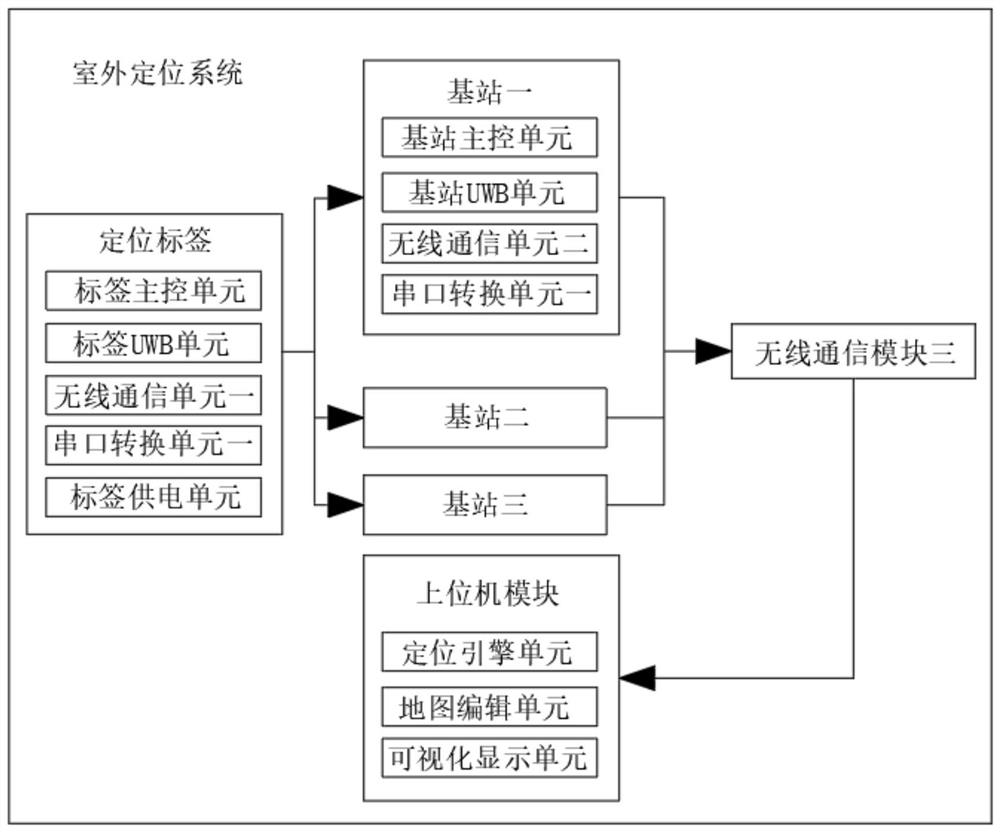
图1为本发明提出的无线高精度远距离室外定位系统的整体结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
参照图1,无线高精度远距离室外定位系统,包括定位标签、基站一、基站二、基站三、交换机模块和上位机模块;
其中,定位标签设置于被测物体上,定位标签包括标签主控单元、标签UWB单元、无线通信单元一串口转换单元一和标签供电单元;基站一、基站二和基站三设置于定位空间内预设位置,基站一、基站二和基站三均包括有基站主控单元、基站UWB单元、无线通信单元二和串口转换单元二;上位机模块包括定位引擎单元、地图编辑单元和可视化现实单元;标签主控单元和基站主控单元均具体为STM32F103T8U6芯片;标签UWB单元和基站UWB单元均具体为DWM1000芯片;串口转换单元一和串口转换单元二均具体为MAX3232串口转换芯片。
标签主控单元用于控制定位标签的运行、复位和启闭;标签UWB单元用于以脉冲方式重复不断的发送数据帧,无线通信单元一用于将数据帧通过无线传输方式分别发送给基站一、基站二和基站三;串口转换单元以用于通过上位机对定位标签进行设置和更新;标签供电模块用于为定位标签进行供电。
基站主控模块用于控制基站一的运行、复位和启闭;基站UWB单元用于接收无线通信单元一发送的数据帧,并测量数据帧到达基站一的时间,形成时间差数据一;无线通信二单元用于将时间差数据一发送至交换机模块;串口转换单元二用于通过上位机对基站一进行设置和更新;基站二用于通过内置基站UWB单元接收数据帧,同时测量数据帧到达基站二的时间,形成时间差数据二,并发送至交换机模块;基站三用于通过内置基站UWB单元接收数据帧,同时测量数据帧到达基站三的时间,形成时间差数据三,并发送至交换机模块。
交换机模块用于将时间差数据一、时间差数据二和时间差数据三进行数模转换,并上传至上位机模块;定位引擎单元用于接收经过数模转换后的时间差数据一、时间差数据二和时间差数据三,并利用TDOA算法进行计算,得到定位标签位置;地图编辑单元用于将定位标签位置和电子地图进行结合和标注;可视化显示单元用于将结合和标注后的定位标签位置进行可视化展示。
TDOA算法具体为卡尔曼滤波和Chan算法的融合;卡尔曼滤波运算过程如下:
(1)状态预测,其方程如下:
(2)误差协方差预测,其方程如下:
(3)卡尔曼增益,其方程如下:
(4)状态更新,其方程如下:
(5)误差协方差更新,其方程如下:
式中:B表示应用于控制向量U
Chan算法公式如下:
X=A
ad
式中:d
*A*B-1,b=B
DWM1000芯片主要包括模拟接收机、模拟发射机、锁相环/时钟发生器、数字收发机、电源管理模块、主机接口/SPI和状态控制器;STM32F103T8U6芯片主要包括7个定时器、2个ADC和9个通信接口。
本发明的工作原理及使用流程:该无线高精度远距离室外定位系统,在使用前,首先需要将定位标签安装于被测物体上,而基站一、基站二和基站三设置于定位空间内预设位置;之后上位机分别向定位标签、基站一、基站二和基站三发送指令,然后分别通过标签主控单元和基站主控单元控制定位标签、基站一、基站二和基站三开始运行;运行时,标签UWB单元会以脉冲方式重复不断的发送数据帧,之后无线通信单元一会将数据帧通过无线传输方式分别发送给基站一、基站二和基站三;然后基站UWB单元会接收无线通信单元一发送的数据帧,并测量数据帧到达基站一的时间,形成时间差数据一;同时基站二会通过内置基站UWB单元接收数据帧,测量数据帧到达基站二的时间,形成时间差数据二;而基站三也会通过内置基站UWB单元接收数据帧,测量数据帧到达基站三的时间,形成时间差数据三;然后无线通信单元二会将时间差数据一、时间差数据二和时间差数据三发送至交换机模块;然后交换机模块会将时间差数据一、时间差数据二和时间差数据三进行数模转换,然后上传至上位机模块;紧接着定位引擎单元会接收经过数模转换后的时间差数据一、时间差数据二和时间差数据三,并利用TDOA算法进行计算,得到定位标签位置;然后地图编辑单元会将定位标签位置和电子地图进行结合和标注;最后可视化显示单元会将结合和标注后的定位标签位置进行可视化展示;本发明利用UWB技术作为该定位系统的核心技术,有利于实现厘米级室外精确定位,并且UWB技术以脉冲方式进行数据帧的发送,相较于传统的GPS和北斗系统,其受干扰性较小;而且本发明采用卡尔曼滤波和Chan算法的融合进行定位计算,进一步提高了该系统的精确性。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 无线高精度远距离室外定位系统
- 基于超宽带和远距离无线通信技术的室内高精度定位系统