驱动控制装置、系统及方法、镜头装置及存储介质
文献发布时间:2023-06-19 11:29:13
技术领域
本发明涉及驱动控制装置、驱动控制系统、镜头装置、驱动控制方法及存储介质。
背景技术
振动致动器包括振动器,通过施加具有相位差的两相频率信号而使振动器产生诸如椭圆运动的振动,并且振动器与同振动器接触的接触体相对移动。作为用于控制振动致动器的驱动的方法,已知改变两相频率信号的频率的频率控制和改变两相频率信号的相位差的相位差控制的方法。频率控制和相位差控制经常用于分别以高速和低速驱动振动致动器。
日本特开(“JP”)第2014-153497号公报公开了一种镜筒,其中,在开始驱动、反转驱动方向或停止驱动时改变相位差时,使驱动电压低于在正常驱动振动波电动机时的驱动电压,以便抑制在改变相位差时的噪声。
然而,在JP 2014-153497的镜筒中,在行进方向上的椭圆运动的振幅与在垂直于行进方向的方向上的椭圆运动的振幅之间的比率根据相位差而变化。因此,随着相位差减小,在垂直于行进方向的方向上的振幅可能相对增加,并且可能发生不必要的振动。尽管频率控制可以抑制在垂直于行进方向的方向上的振动,但是电力消耗可能会增加。
发明内容
本发明提供了驱动控制装置、驱动控制系统、镜头装置、驱动控制方法以及存储介质,当以低速驱动振动致动器时,它们各自可以抑制噪声和不必要的振动并且可以降低电力消耗。
根据本发明的一个方面的驱动控制装置控制致动器,致动器使振动器和与振动器接触的接触体相对移动,通过施加具有相位差的第一信号和第二信号而使振动器产生振动,所述驱动控制装置包括:第一确定单元,其被构造为确定所述相位差;以及第二确定单元,其被构造为确定供给到致动器的电力的电压振幅,使得所述电压振幅随着所述相位差的绝对值减小而减小。
包括上述驱动控制装置的驱动控制系统,与上述驱动控制装置相对应的驱动控制方法,以及存储使计算机能够用作驱动控制装置的各个单元的计算机程序的存储介质也构成本发明的其他方面。
通过以下参考附图对示例性实施例的描述,本发明的其他特征将变得清楚。
附图说明
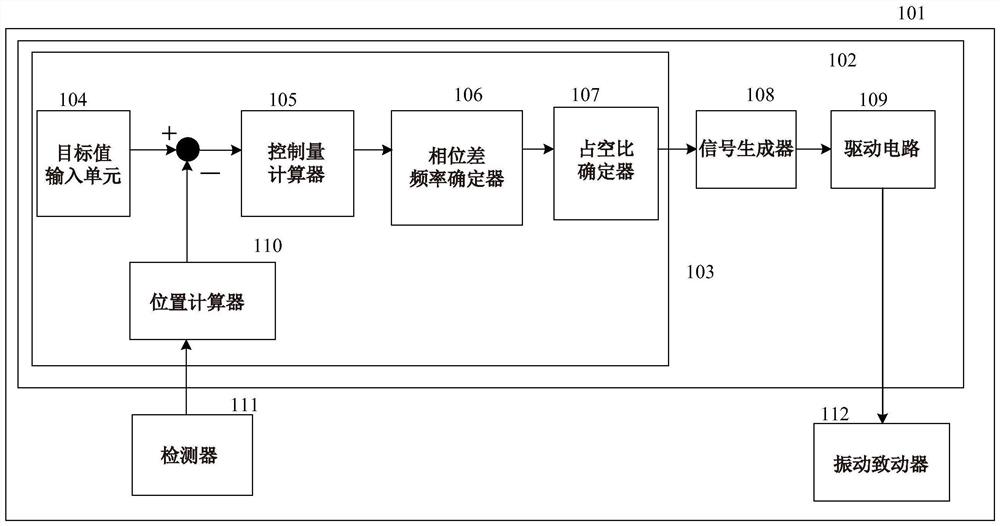
图1是示出根据第一实施例的驱动控制系统的框图。
图2是示出根据第一实施例的振动致动器的构造图。
图3是示出根据第一实施例的用于振动致动器的驱动信号与速度之间的关系的图。
图4A和图4B是示出根据第一实施例的相位差与占空比之间的关系的示例的图。
图5是示出根据第一实施例的通过控制相位差来驱动振动致动器的方法的流程图。
图6是示出根据第二实施例的驱动控制系统的框图。
图7是示出作为根据第二实施例的摄像装置的示例的镜头可互换数字单镜头反光相机的框图。
图8A和图8B是示出根据第二实施例的相位差与占空比之间的关系的示例的图。
图9是示出根据第二实施例的通过相位差控制来驱动振动致动器的方法的流程图。
图10是示出根据第三实施例的驱动控制系统的框图。
图11A至图11C是示出根据第三实施例的速度、加速度及占空比之间的关系的示例的图。
图12是示出根据第三实施例的通过相位差控制来驱动振动致动器的方法的流程图。
图13是示出根据第四实施例的驱动控制系统的框图。
图14A和图14B是示出根据第四实施例的相位差与占空比之间的关系的示例的图。
图15是示出根据第四实施例的通过相位差控制来驱动振动致动器的方法的流程图。
具体实施方式
现在参考附图,对根据本发明的实施例给出描述。各附图中的对应元件将由相同的附图标记表示,并且将省略其描述。
第一实施例
图1是示出根据本实施例的驱动控制系统101的框图。驱动控制系统101包括驱动控制装置102、检测器111和振动致动器112。
图2是示出根据本实施例的振动致动器112的框图。振动致动器112包括接触体201和振动器205。接触体201和振动器205被加压并且彼此接触。振动器205包括具有突起202的金属弹性体203和与金属弹性体203接合的机电能量转换元件(压电元件)204。具有相位差并周期性地变化的两相驱动信号被施加到压电元件204,从而引起椭圆运动的振动。驱动信号是方波信号,并且方波的脉冲宽度与一个周期的比率被称为占空比。当占空比增加时,供给到振动致动器112的电力的电压振幅增加。当占空比减小时,供给到振动致动器112的电力的电压振幅减小。
通过相位差控制以低速来驱动振动致动器112,并且通过频率控制以高速来驱动振动致动器112。图3是示出振动致动器112的驱动信号与速度之间的关系的图。横轴表示频率,纵轴表示速度。图3示出了90度、60度和30度三个相位差。在相位差控制期间,将频率固定为起始频率,并且通过改变相位差来驱动振动致动器112。相位差是具有符号的值,并且符号指示振动致动器112的行进方向。在频率控制期间,相位差是固定的,并且通过从起始频率改变频率来驱动振动致动器112。
在本实施例中,在速度为v301以下的低速区域中,进行相位差为-90度到90度的相位差控制。在速度为v301以上的高速区域中,进行将相位差固定为90度或-90度的频率控制。在频率控制中,可以将相位差设置为另一个值。通过脉冲宽度的比率,即占空比来调整供给到振动致动器112的电力的电压振幅。可以通过脉冲宽度调制方法之外的方法来调整电压振幅。除了脉冲宽度调制方法之外,还可以使用线性方法作为用于调整电压振幅的方法。在下面的描述中,描述了通过调整占空比来调整电压振幅的示例,但是可以将占空比简单地理解为电压振幅。
振动致动器112在图2的x方向上移动。
驱动控制装置102包括控制器103、信号生成器108和驱动电路109。检测器111包括被构造为检测振动致动器112的位置的位置传感器。位置传感器是光学编码器,该光学编码器包括具有条纹图案的光学尺和接收从发光器发射并被光学尺反射的光的光学传感器。
控制器103包括CPU等,其被构造为周期性地执行各种处理,并且被构造为控制施加到振动致动器112的两相驱动信号(第一信号和第二信号)的频率、相位差、占空比等。控制器103包括目标值输入单元104、控制量计算器105、作为第一确定器的相位差频率确定器106、作为第二确定器的占空比确定器107以及位置计算器110。
目标值输入单元104被构造为设置将振动致动器112移动到的目标位置。目标位置是随时间变化的指令值,并且被周期性地计算直到振动致动器112移动到最终停止位置。
位置计算器110被构造为通过使用由AD转换器获取的数字信号来计算关于振动致动器112的位置的位置信息,该AD转换器转换从检测器111输出的模拟信号。
控制量计算器105被构造为基于从目标值输入单元104周期性地获取的振动致动器112的目标位置与从位置计算器110输入的振动致动器112的当前位置之间的差,通过使用PID控制来计算控制量。P代表比例控制,I代表积分控制,并且D代表微分控制。
相位差频率确定器106被构造为通过使用由控制量计算器105计算出的控制量来确定用于控制振动致动器112的驱动的两相驱动信号的频率和相位差。
占空比确定器107被构造为根据由相位差频率确定器106确定的相位差来确定占空比。通过确定占空比,确定供给到振动致动器112的电力的电压振幅。
信号生成器108被构造为基于均由控制器103设置的频率、相位差及占空比来生成两相驱动信号,并且被构造为将两相驱动信号输出至驱动电路109。
由于从信号生成器108获取的两相驱动信号不足以驱动振动致动器112,因此驱动电路109进行电压放大和功率放大并将两相驱动信号施加到振动致动器112。
在下文中,将参照图4A和图4B描述根据相位差确定占空比的方法。图4A和图4B是示出相位差与占空比之间的关系的示例的图。在图4A中,横轴表示由控制量计算器105计算的控制量,纵轴表示相位差。在图4B中,横轴表示由控制量计算器105计算的控制量,纵轴表示占空比。
当控制量是由虚线401指示的值(=零)时,相位差为零。此时,占空比为d41。随着控制量从零增加,相位差增加。随着相位差的增加,占空比以线性关系增加。当控制量是由虚线403指示的值时,占空比为d42。当控制量变得大于由虚线403指示的值时,驱动控制装置102将振动致动器112的驱动控制方法从相位差控制转变为频率控制。在频率控制中,相位差恒定为90度,占空比也恒定为d42。
随着控制量从零减小,相位差减小并且取负值。相位差的符号指示行进方向,相位差的负值指示行进方向为相反方向。当相位差为负时,根据相位差的绝对值确定占空比。即,占空比随着相位差的减小而增加。当控制量取虚线402所指示的值时,占空比为d42。当控制量变得小于虚线402所指示的值时,驱动控制装置102将振动致动器112的驱动控制方法从相位差控制转变为频率控制。在频率控制中,相位差恒定在-90度,并且占空比也恒定在d42。
如上所述,在本实施例中,占空比随着相位差的绝对值减小而减小。即,随着相位差的绝对值减小,供给到振动致动器112的电力的电压振幅减小。
随着相位差的绝对值减小,椭圆运动在垂直于振动致动器112的行进方向(图2中的x方向)的方向(图2中的y方向)上的振动分量增加。在本实施例中,随着相位差的绝对值减小,占空比减小,即,电压振幅减小,使得可以抑制椭圆运动在垂直于行进方向的方向上的振动分量。通过抑制在垂直于行进方向的方向上的振动分量,可以抑制噪声和不必要的振动,并且可以降低电力消耗。
在下文中,将参照图5描述如下流程:当将振动致动器112移动到最终停止位置(即最终目标位置)时,通过相位差控制来确定相位差和占空比并输出驱动信号。图5是示出根据本实施例的通过相位差控制来驱动振动致动器112的方法的流程图。如上所述,在相位差控制中,频率固定为起始频率。
在步骤S501中,目标值输入单元104设置将振动致动器112移动到的目标位置。
在步骤S502中,控制器103计算将振动致动器112移动到的目标位置与从由检测器111检测到的位置信息获取的振动致动器112的位置之间的差,即偏差。
在步骤S503中,控制量计算器105基于在步骤S502中计算出的差,使用PID控制来计算控制量。
在步骤S504中,相位差频率确定器106根据在步骤S503中计算出的控制量来确定相位差。
在步骤S505中,占空比确定器107通过使用图4A和图4B所示的关系,根据在步骤S504中确定的相位差来确定占空比。在本实施例中,使用了图4A和图4B所示的关系,但是可以使用与图4A和图4B所示的关系不同的关系。
在步骤S506中,信号生成器108基于相位差、频率及占空比来生成具有相位差的两相驱动信号,并将该两相驱动信号输出至驱动电路109。控制器103将相位差、频率及占空比存储为设置值。
如上所述,当以低速驱动振动致动器112时,本实施例可以通过根据相位差控制占空比,在降低电力消耗的同时抑制噪声和不必要的振动。
第二实施例
图6是示出根据本实施例的驱动控制系统101的框图。本实施例的控制器103包括相位差占空比互锁控制执行确定器601。相位差占空比互锁控制执行确定器601被构造为根据要操作振动致动器112的情形或者根据要操作振动致动器112的操作模式,来确定是否根据相位差确定占空比。由于本实施例的驱动控制系统101的其他构造与第一实施例的驱动控制系统101的构造相同,因此将省略其详细描述。
图7是示出镜头可互换数字单镜头反光相机的框图,该镜头可互换数字单镜头反光相机是具有驱动控制系统101的摄像装置的示例。在本实施例中,驱动控制系统101用于驱动作为稍后描述的光学单元的聚焦透镜单元753。数字单镜头反光相机包括数字单镜头反光相机主体701和镜头装置750。数字单镜头反光相机主体701机械地和电气地连接到镜头装置750,并且经由电源端子向镜头装置750供电。
首先,将描述数字单镜头反光相机主体701的构造。
摄像单元704是包括CCD、CMOS等的图像传感器,并且被构造为将通过快门703调整光量的光学图像转换为电信号。A/D转换器705被构造为将从摄像单元704输出的模拟信号转换为数字信号。图像处理器708被构造为对来自A/D转换器705的数据或来自存储器控制器709的数据进行像素插值、调整大小处理或颜色转换处理。图像处理器708被构造为使用拍摄的静止图像数据进行预定的计算处理。相机系统控制器702被构造为使用从图像处理器708获取的计算结果来进行曝光控制和焦点检测控制。进行TTL(通过镜头,through-the-lens)方法的AF(自动对焦)处理、AE(自动曝光)处理和EF(预闪光)处理。图像处理器708使用拍摄的静止图像数据进行预定的计算处理,以基于获取的计算结果进行TTL方法的AWB(自动白平衡)处理。
来自A/D转换器705的输出数据经由图像处理器708和存储器控制器709或经由存储器控制器709被写入存储器710中。存储器710被构造为存储来自A/D转换器705的静止图像数据和要在显示器707上显示的用于显示的静止图像数据。存储器710还用作用于显示静止图像的存储器(视频存储器)。D/A转换器706被构造为将存储在存储器710中的用于显示的静止图像数据转换为模拟信号,并且将模拟信号供给到显示器707。存储在存储器710中的用于显示的静止图像数据经由D/A转换器706被显示在显示器707上。
显示器707是诸如LCD的显示器,并且被构造为根据来自D/A转换器706的模拟信号进行显示。A/D转换器705对数字信号进行A/D转换。存储器710累积数字信号。此后,数字信号由D/A转换器706进行模拟转换,被顺序地发送到显示器707,并且被显示,从而可以显示直通静止图像(a through still image),即,可以进行实时取景显示。
非易失性存储器712是作为能够电擦除和记录的记录介质的存储器,例如是EEPROM等。非易失性存储器712存储用于相机系统控制器702的操作的常数、程序等。
相机系统控制器702包括至少一个CPU或电路,并且被构造为控制整个数字单镜头反光相机。相机系统控制器702被构造为执行记录在非易失性存储器712上的程序。系统存储器711例如是RAM。在系统存储器711中,展开从非易失性存储器712读取的常数、变量、程序等,用于相机系统控制器702的操作。相机系统控制器702被构造为通过控制图像处理器708、存储器控制器709和存储器710来控制显示。
操作单元713、快门按钮715和模式选择开关716是用于向相机系统控制器702输入各种操作指令的操作单元。通过操作模式选择开关716,相机系统控制器702的操作模式可以切换到静止摄像模式、运动摄像模式、回放模式等中的任何一种。静止图像记录模式中包括的模式例如是自动摄像模式、自动场景判别模式、手动模式、用于各种摄像场景的摄像设置的各种场景模式、程序AE模式和自定义模式。
在快门按钮715的操作中间,通过作为摄像准备指令的所谓的半按下来接通第一快门开关720,并且生成第一快门开关信号SWl。当生成第一快门开关信号SW1时,诸如AF处理、AE处理、AWB处理及EF处理的操作开始。
当对快门按钮715的操作完成时,通过作为摄像指令的所谓的全按下来接通第二快门开关721,并且生成第二快门开关信号SW2。当生成第二快门开关信号SW2时,相机系统控制器702开始从摄像单元704读取信号到将静止图像数据写入记录介质724的对摄像处理的一系列操作。
当选择并操作在显示器707上显示的各种功能图标时,针对各个场景对操作单元713的各个操作构件适当地分配功能,并且各个操作构件用作各种功能按钮。
电源开关717是被构造为切换数字单镜头反光相机主体701的电源开/关的操作单元。电源控制器718包括电池检测电路、DC-DC转换器、用于切换要通电的块的开关电路等,以检测是否安装了电池、电池类型和剩余电池电量。电源控制器718被构造为基于检测结果和来自相机系统控制器702的指令来控制DC-DC转换器,并且在所需时段内向包括记录介质724的各个单元供给所需电压。电源单元719包括诸如碱性电池和锂电池的一次电池,诸如NiCd电池、NiMH电池及Li电池的二次电池,AC适配器等。
记录介质I/F 723是与诸如存储卡或硬盘的记录介质724的接口。记录介质724是诸如用于记录拍摄的静止图像的存储卡的记录介质,并且包括半导体存储器、光盘、磁盘等。
相机通信器714被构造为经由镜头通信器759向镜头装置750给出期望的操作指令,诸如用于驱动聚焦透镜和光圈的指令,并且被构造为发送/接收必要的信息。
接下来,将描述镜头装置750的构造。
镜头装置750包括具有光圈752、聚焦透镜单元753、变焦透镜单元754和前透镜单元755的摄像光学系统。
镜头系统控制器751是包括CPU等的计算机,并且被构造为控制包括光圈驱动器756、聚焦驱动器757、焦距检测器758、镜头通信器759及存储器760的整个镜头装置750。镜头系统控制器751被构造为经由镜头通信器759向数字单镜头反光相机主体701发送信息/从数字单镜头反光相机主体701接收信息。
光圈驱动器756被构造为根据来自镜头系统控制器751的指令控制光圈752的孔径,并进行光量调整操作。
聚焦驱动器757包括驱动控制系统101,并且被构造为根据来自镜头系统控制器751的指令在作为x方向的光轴方向上驱动聚焦透镜单元753,以调整焦点。
操作开关763包括用于变焦、聚焦的手动操作开关、光圈,以及用于切换自动/手动的设置开关。
焦距检测器758被构造为通过使用诸如可变电阻器的变焦位置传感器检测变焦透镜单元754的位置来检测摄像光学系统的焦距。
存储器760包括ROM、RAM等,并且被构造为存储镜头装置750的产品型号、序列号、焦距信息、聚焦灵敏度信息等。
温度检测器761可以检测使用镜头装置750的环境。
取向检测器762被构造为检测镜头装置750相对于作为y方向的重力方向的取向,即位置。可以将加速度传感器等用作取向检测器762。基于由取向检测器762检测到的取向,可以确定镜头装置750处于水平状态还是垂直状态。
例如,当半按下快门按钮715并进行用于检测焦点的操作时,相机系统控制器702经由相机通信器714并且经由镜头通信器759将聚焦透镜单元753的驱动指令发送到镜头系统控制器751。聚焦透镜单元753的驱动指令是当聚焦透镜单元753移动时,聚焦透镜单元753向对焦位置的移动量和聚焦透镜单元753的速度,根据与被摄体图像的信号的相位差相对应的散焦量来计算移动量和速度中的各个。当镜头系统控制器751接收到用于聚焦透镜单元753的驱动指令时,镜头系统控制器751经由聚焦驱动器757将聚焦透镜单元753移动到对焦位置。镜头系统控制器751将关于摄像模式的信息发送到聚焦驱动器757。
在下面的描述中,将在使用模式选择开关716选择了静止摄像模式或运动摄像模式的情况下描述聚焦透镜单元753的驱动控制。由模式选择开关716选择的摄像模式经由相机通信器714和镜头通信器759发送到镜头装置750。静止摄像模式需要从低速到高速的宽速度区域。在运动摄像模式中,速度可以相对较低,但是需要安静。
将描述根据摄像模式而相对于相位差对占空比的控制。图8是示出本实施例的相位差与占空比之间的关系的示例的图。由于静止摄像模式中的相位差与占空比之间的关系与在第一实施例中描述的图4A和图4B中所示的关系相同,因此将省略其详细描述。在运动摄像模式中,由于不根据相位差来控制占空比,因此占空比都恒定在d81,与相位差无关。
图9是示出通过本实施例的相位差控制来驱动振动致动器112的方法的流程图。在本实施例中,将描述与图5的序列不同的部分。
镜头系统控制器751经由聚焦驱动器757将聚焦透镜单元753移动到对焦位置,并且将关于摄像模式的信息发送到聚焦驱动器757。
在步骤S901中,相位差占空比互锁控制执行确定器601根据摄像模式确定是否根据相位差确定占空比。当设置了静止摄像模式时,确定根据相位差确定占空比,并且处理进入步骤S505。当设置了运动摄像模式时,确定不根据相位差确定占空比,并且处理进入步骤S902。
在步骤S902中,占空比确定器107与相位差无关地确定占空比。
如上所述,根据本实施例的构造,除了第一实施例的效果之外,还可以通过根据操作模式选择相位差与占空比之间的关系来适当地驱动振动致动器112。
当设置了运动摄像模式时,本实施例与相位差无关地确定占空比,但是可以根据相位差来确定占空比。在这种情况下,将占空比的最小值设置为小于摄像模式中的占空比的最小值。
本实施例根据摄像模式确定是否根据相位差确定占空比。
然而,本发明不限于此。振动致动器112的操作指令可以用于进行确定。例如,可以将指令值用于确定,该指令值与到被给予振动致动器112的最终目标位置的移动量有关。具体地,当移动量的指令值小于预定值时,可以不根据相位差来确定占空比。当移动量的指令值大于预定值时,可以根据相位差来确定占空比。可以通过使用与振动致动器112的速度有关的指令值来进行确定。当与振动致动器112的速度有关的指令值大于预定值时,可以不根据相位差来确定占空比。当与振动致动器112的速度有关的指令值小于预定值时,可以根据相位差来确定占空比。
第三实施例
图10是本实施例的驱动控制系统101的框图。当以低速驱动聚焦透镜单元753时,在抑制不必要的振动同时,需要停止精度。但是,由于摩擦力等,停止精度可能会劣化。在本实施例中,控制器103包括减速状态确定器1001,该减速状态确定器1001被构造为确定振动致动器112的操作状态,使得振动致动器112以高精度停止在停止位置。控制器103被构造为使用减速状态确定器1001的确定结果来确定是否需要使振动致动器112从当前速度减速。由于本实施例的驱动控制系统101的其他构造与第一实施例的驱动控制系统101的构造相同,因此将省略其详细描述。由于具有本实施例的驱动控制系统101的数字单镜头反光相机的构造与第二实施例的数字单镜头反光相机的构造相同,因此将省略其详细描述。
图11A至图11C是示出本实施例的速度、加速度及占空比之间的关系的示例的图。在图11A至图11C中的各个图中,横轴表示时间。振动致动器112在时间t1开始驱动,在时间t2达到速度v111,在时间t3开始减速,并且在时间t4停止在最终目标位置。从时间t1到t2,振动致动器112的加速度被设置为a111,使得速度增加到速度v111。从时间t1到t2,占空比从d41增加到d42。从时间t2到t3,振动致动器112的加速度被设置为零。由此,振动致动器112以恒定的速度被驱动,并且相位差也取恒定的值。从时间t3到t4,振动致动器112的加速度被设置为-a111,从而振动致动器减速。从时间t3到t4,占空比维持在d42而不进行更新。
图12是示出通过本实施例的相位差控制来驱动振动致动器112的方法的流程图。在本实施例中,将描述与图5的序列不同的部分。
在步骤S1201中,减速状态确定器1001确定振动致动器112的操作状态。在本实施例中,当振动致动器112的加速度为负时,确定振动致动器112的操作状态处于减速状态。当振动致动器112的加速度不为负时,确定振动致动器112的操作状态不处于减速状态。
在步骤S1202中,控制器103基于在步骤S1201中确定的振动致动器112的操作状态,确定是否需要使振动致动器112减速。当振动致动器112处于减速状态并且需要使振动致动器112减速时,处理进入步骤S505。当振动致动器112不处于减速状态并且不需要使振动致动器112减速时,处理进入步骤S1203。
在步骤1203中,占空比确定器107不管相位差如何都将当前保持的值确定为占空比,即,维持占空比的值。
如上所述,除了第一实施例的效果之外,本实施例的构造还可以使振动致动器112以高精度停止。
第四实施例
图13是示出本实施例的驱动控制系统101的框图。本实施例的控制器103包括相位差占空比互锁控制关系确定器1301。相位差占空比互锁控制关系确定器1301被构造为根据使用数字单镜头反光相机的状态从相位差与占空比之间的多个关系中选择适当的关系。在本实施例中,相位差占空比互锁控制关系确定器1301通过使用来自镜头装置750的取向检测器762的信息来选择相位差与占空比之间的关系。由于本实施例的驱动控制系统101的其他构造与第一实施例的驱动控制系统101的构造相同,因此将省略其详细描述。由于本实施例的包括驱动控制系统101的数字单镜头反光相机的构造与第二实施例的数字单镜头反光相机的构造相同,因此将省略其详细描述。
振动致动器112的驱动方向(图2中的x方向)与光轴方向(图7中的x方向)平行,光轴方向是聚焦透镜单元753的驱动方向。振动致动器112的驱动方向垂直于重力方向,即图7中的y方向。当振动致动器112的驱动方向垂直于重力方向时,振动致动器112容易受到重力的影响,并且可能难以停止聚焦透镜单元753的驱动。因此,在本实施例中,根据使用时镜头装置750的取向,具体地,通过比较在图7中x方向的角度θ和阈值θt,来改变相位差与占空比之间的关系。
图14A和图14B是各自示出本实施例的相位差与占空比之间的关系的示例的图。当角度θ小于阈值θt时,占空比基于第一关系而变化。由于第一关系与在第一实施例中图4A和图4B所示的关系相同,因此将省略其详细描述。当角度θ大于阈值θt时,占空比基于第二关系而变化。在第二关系中,当控制量为虚线401指示的值(=零)时,占空比是大于d41的d141,d41是第一关系中的占空比的最小值。随着控制量从零增加,占空比以线性关系增加。当控制量为由虚线403指示的值时,占空比为d42。当控制量变得大于由虚线403指示的值时,驱动控制装置102将振动致动器112的驱动控制方法从相位差控制转变为频率控制。在频率控制中,相位差恒定为90度,占空比也恒定为d42。随着控制量从零减小,相位差减小并且变为负值。相位差的符号指示行进方向,相位差的负值指示行进方向为相反方向。当相位差为负时,根据相位差的绝对值确定占空比。即,占空比随着相位差的减小而增加。当控制量为由虚线402指示的值时,占空比为d42。当控制量变得小于由虚线402指示的值时,驱动控制装置102将振动致动器112的驱动控制方法从相位差控制转变为频率控制。在频率控制中,相位差恒定为-90度,并且占空比也恒定为d42。
图15是示出通过本实施例的相位差控制来驱动振动致动器112的方法的流程图。在本实施例中,将描述与图5的序列不同的部分。
镜头系统控制器751经由聚焦驱动器757将聚焦透镜单元753移动到对焦位置,并且将镜头装置750的取向信息(角度θ)发送到聚焦驱动器757。
在步骤S1501中,相位差占空比互锁控制关系确定器1301通过使用从镜头系统控制器751获取的镜头装置750的取向信息(角度θ)来确定是否根据相位差来控制占空比。当角度θ小于阈值θt时,处理进入步骤S1502。当角度θ大于阈值θt时,处理进入步骤S1503。当角度θ等于阈值θt时,可以任意设置进入哪个步骤。
在步骤S1502中,占空比确定器107通过使用图14A和图14B所示的第一关系,根据在步骤S504中确定的相位差来确定占空比。
在步骤S1503中,占空比确定器107通过使用图14A和图14B所示的第二关系,根据在步骤S504中确定的相位差来确定占空比。
如上所述,根据本实施例的构造,除了第一实施例的效果之外,还可以以高精度停止振动致动器112。
在本实施例中,即使当取向信息(角度θ)大于阈值θt时,也根据相位差来控制占空比,但是可以不控制占空比,即,可以与相位差无关地确定占空比。
在本实施例中,相位差占空比互锁控制关系确定器1301根据镜头装置750的取向作为使用数字单镜反光相机的状态,来选择相位差与占空比之间的关系。然而,本发明不限于此。例如,在低温环境中,当润滑油等用于被驱动部件时,作用在振动致动器112上的负载可能由于粘度的变化而变化。可以根据使用数字单镜头反光相机的温度环境来选择相位差与占空比之间的关系。在这种情况下,可以使用来自温度检测器761的信息来选择相位差与占空比之间的关系。即,当来自温度检测器761的指示温度环境的值大于预定值时,可以使用第一关系,当来自温度检测器761的指示温度环境的值小于预定值时,可以使用第二关系。
除温度之外,湿度可以用于确定相位差与占空比之间的关系。例如,在高湿度环境中,摩擦可能会改变,并且停止精度可能会劣化。当来自湿度检测器(未示出)的指示湿度环境的值小于预定值时,可以使用第一关系。当来自湿度检测器的指示湿度环境的值大于预定值时,可以使用第二关系。
以上实施例可以提供驱动控制装置、驱动控制系统、镜头装置、驱动控制方法以及存储介质,当以低速驱动振动致动器时,它们各自可以抑制噪声和不必要的振动并且可以降低电力消耗。
尽管已经参考示例性实施例描述了本发明,但是应当理解,本发明不限于所公开的示例性实施例。所附权利要求的范围应被赋予最宽泛的解释,以涵盖所有这样的变形以及等同的结构和功能。
- 驱动控制装置、系统及方法、镜头装置及存储介质
- 镜头驱动控制装置、镜头驱动装置以及内窥镜系统