用于车辆的距离测量系统
文献发布时间:2023-06-19 11:29:13
技术领域
本发明的实施例涉及一种距离测量系统,以及一种具有距离测量系统的车辆。总体上,本发明在车辆的领域内,例如移动式建筑或作业机器、升降工作平台、消防车转台梯等。
背景技术
从WO 2017/178737A1中,已知一种用于防止操作者挤压的升降平台的控制面板。升降工作平台包括工作笼,该工作笼上设置有轨道,其中,用于控制升降工作平台的运动的控制面板布置在轨道上。在控制面板上布置一个系统,通过该系统可以确定控制面板是否安装在轨道上、人是否在工作笼中靠近控制面板或向控制面板的方向倾斜,或者是否存在障碍物。为此,该系统包括至少一个波发射器和一个波接收器,其中,该系统检测外部物体的干扰,其中,接收器接收由发射器通过来自干扰物体的反射而发射的波。
该已知系统的缺点是,根据工作笼中的控制面板的布置,不是工作笼周围的所有物体都被检测到,并因此当工作笼移动时,可能导致与没有被检测到的障碍物的碰撞。此外,可能发生错误的测量,特别是在发射器和接收器朝向顶部定向的情况下,因为例如雨水可能不会流走而是保留在传感器头上。这可能具有这样的效果:在控制面板的方向上倾斜的人可能不被检测到,或者可能不被正确地检测到并且可能被绊住。
因此,本发明的目的是提供一种用于障碍物检测的改进概念,例如在升降工作平台的工作笼的周围。
该目的通过独立权利要求中陈述的特征来解决。本发明的有利的进一步展开可以在从属权利要求中找到。
发明内容
本发明的实施例提供了一种用于车辆的距离测量系统,其中,距离测量系统包括用于非接触地确定到物体的距离的测量单元,并且该测量单元包括:
传感器单元,配置成发射信号并接收由物体反射的信号;
评估单元,从由传感器单元发射和接收的信号确定测量单元与物体之间的距离;以及
信号偏转设备,布置在传感器单元的区域中,该信号偏转设备具有反射器表面,该反射器表面使由传感器单元发射的信号在偏离信号传播方向的方向上偏转,特别是在物体的方向上与信号传播方向基本上成直角。
由传感器单元发射的信号在撞击物体(障碍物)时被其反射。这里,有利的是,使由传感器单元发射的信号在其传播方向上偏转,特别是在要确定到距离测量系统上方的物体的距离时。为此,传感器单元本身不用必须朝向顶部(在要检测的物体或障碍物的方向上)定向,而是在水平方向上定向,即,传感器单元定向成使得信号由传感器单元在水平方向上发射。因此,例如,(雨)水可以流走并且不保留在传感器单元上。因此,即使在下雨天气,传感器单元的功能和可用性也不受限制。
由计算单元(例如微控制器系统)构成的评估单元从由传感器单元发射和接收的信号中计算距离值,并且将结果有利地例如根据现场总线消息(CAN、LIN等)输出并传递到控制器(例如车辆或机器控制器)。基于所测量的距离值,控制器然后可相应地对车辆或机器的运动作出反应,例如停止、减速等。如果距离测量系统在例如升降工作平台或消防车转台梯中使用,则该控制器可以是安全定向的控制器。
有利地,信号偏转设备直接布置在传感器单元的前面或者在测量方向上(即在发送和接收方向上)与其相距(限定)距离。在距离测量中,到反射器表面的距离必须包括在计算中,该反射器表面使由传感器单元发射的信号在物体或障碍物的方向上偏转。然而,这在设计距离测量系统时是已知的,并且可作为常数存储(例如保存)在评估装置或传感器单元中。在本发明的上下文中,由传感器单元发射和接收的信号的传播方向意味着测量方向,或者换句话说,所发射或接收的信号的相应方向矢量。信号偏转设备使发射的信号在物体的方向上偏转,使得撞击物体的信号的方向矢量基本上垂直于由传感器单元发射的信号的方向矢量。这里,传感器单元在相反方向上发送和接收信号。
根据实施例,反射器表面使由物体反射的信号在偏离反射信号的传播方向的方向上偏转,特别是在传感器单元的方向上与反射信号的传播方向基本上成直角。信号偏转设备使由物体反射的信号在传感器单元的方向上偏转,使得由物体反射的信号的方向矢量基本上垂直于由传感器单元接收的信号的方向矢量。
根据实施例,距离测量系统包括测量模块,测量单元布置在测量模块上或测量模块中。优选地,测量模块以纵向方式配置,例如配置为可具有圆形、正方形、矩形或类似截面的测量束。这里,测量单元可布置在测量模块上,例如,螺纹连接、粘接或粘贴在其上等。然而,集成变型也是可能的,即测量单元或其部分(例如评估单元和/或传感器单元)结合或集成在测量模块中。
根据实施例,信号偏转设备以可释放的方式安装在测量单元上或测量模块上,特别是在没有任何工具的情况下可释放。信号偏转设备例如可以是卡扣(卡扣连接)、夹持、粘贴或借助于维可牢连接等安装在测量单元或测量模块上/安装到测量单元或测量模块。当信号偏转设备有缺陷时,这是特别有利的,因为信号偏转设备然后可以容易地并且可能在没有任何工具的情况下被更换。然而,也可能将信号偏转设备螺纹连接到测量单元或测量模块上。
根据实施例,信号偏转设备包括以可释放的方式彼此连接的保持器和反射器单元,特别是在没有任何工具的情况下可释放。该保持器也可以可释放的方式安装在测量单元上或测量模块上,然而,在测量模块上的固定安装或在测量模块的壳体处执行的保持机构,即集成在测量模块的壳体中的保持机构,是可能的。包括反射器表面的反射器单元也以可释放的方式布置在保持器上。反射器单元例如可以是卡扣(卡扣连接)、夹紧、粘贴或借助于维可牢连接等安装。如果反射器单元例如有缺陷,则可以有利地将其从保持器释放并且容易地更换。
根据实施例,反射器单元以可滑动的方式布置在保持器上,特别是可滑动到侧面。因此,可以容易地改变距离测量的测量方向,或者可以改变测量模块或测量单元的测量方向,从而适应于车辆或机器的状况。例如,如果具有两个测量单元的测量模块将在车辆或机器上用于两个不同的测量方向,例如,在第一测量单元中,反射器单元可直接在传感器单元的前面滑动,使得由第一测量单元的传感器单元发射的信号在物体或障碍物的方向上偏转,而在第二测量单元中,反射器单元朝向侧面滑动,使得由第二测量单元的传感器单元发射的信号不偏转(并因此具有不同的测量方向)。
根据实施例,保持器包括用于锁定反射器单元的锁和/或反射器单元52包括用于锁定反射器单元的锁。因此,有利地防止了在车辆或机器的操作期间反射器单元的自动释放。有利地,该锁可通过手指的触摸而容易且快速地操作,使得反射器单元可容易地从保持器释放和更换。这里,该锁可布置在保持器上和/或反射器单元上。
根据实施例,信号偏转设备包括在保持器与反射器单元之间的至少一个开口或至少一个间隙。因此,有利地,例如没有(雨)水保留在信号偏转设备中,特别是当测量单元或距离测量系统定向成使得距离测量系统上方的物体(障碍物)将被检测到时。为此,传感器单元在水平方向上定向,即传感器单元定向成使得信号在水平方向上由传感器单元发射和接收,而信号偏转设备的反射器单元可以像漏斗一样起作用,使得在没有至少一个开口或没有至少一个间隙的情况下,(雨)水可以保留在其中并且将影响传感器单元的功能和可用性。
根据实施例,传感器单元包括配置成发射信号并接收由物体反射的信号的传感器头。为此,既可以发射又可以接收(具有时间偏移)信号的传感器头或者具有单独的收发器的传感器头都是可能的,其中,不需要在发送和接收之间进行切换。
根据实施例,由传感器单元发射和接收的信号是超声信号、微波信号或光学信号。雷达信号等作为微波信号是可能的,例如,光(例如红外光)或激光等可以用作光学信号。根据所使用的测量技术(信号),信号偏转设备的反射器表面以蛋白石、有光泽、镜面的等方式配置。
根据实施例,测量模块包括可借助于电缆连接而彼此电连接的多个测量单元。这里,测量单元可布置在测量模块中或测量模块上,例如螺纹连接、粘附、粘贴到测量模块/螺纹连接、粘附、粘贴在测量模块上,或者完全或部分地集成在测量模块中,即,测量单元或其部分,例如评估单元和/或传感器单元结合或集成在测量模块中。每个评估单元例如由计算单元(例如微控制器系统)组成,从由传感器单元发射和接收的信号中计算距离值,并且将结果经由电缆连接例如根据现场总线消息(CAN、LIN等)输出或传递到控制器(例如车辆或机器控制器)。这里,测量单元可同时或在时间上偏移地执行相应的距离测量,即,一个接一个地或按时间顺序或以基于优先级的方式执行。由于测量单元彼此电连接并且因此可经由现场总线消息交换数据的事实,所以可能执行距离的同时以及时间偏移或基于优先级(即,例如取决于测量单元的数量或布置)的测量。
根据实施例,测量模块的测量单元具有公共的评估单元。例如,如果两个或三个测量单元布置在测量模块中或测量模块上,则传感器单元可能电连接到公共的评估单元。由此,由于可节省电子部件,所以测量模块作为整体变得更加成本有效。然而,多于两个或三个测量单元也可能电连接到公共的评估单元。当布置在测量模块中或测量模块上的所有测量单元都电连接到测量模块的同一评估单元时,是有利的且成本有效的。
根据实施例,测量单元布置在测量模块上或测量模块中,使得该测量单元确定到相同物体的距离或到不同物体的距离。测量单元可以在相同的方向上布置在测量模块中或测量模块上,使得确定到相同物体(障碍物)的距离或到不同物体(不同障碍物)的距离。另一方面,测量单元不是必须一定在相同的检测方向上布置在测量模块中或测量模块上,而是可以具有不同的检测方向,并因此可以确定到不同物体(不同障碍物)的距离。
根据实施例,距离测量系统包括多个测量模块,这些测量模块可借助于电缆连接或无线连接而彼此连接。测量模块可借助于电缆连接或无线连接以级联方式布置在距离测量系统中,即,测量模块可串联连接或者可彼此连接,使得距离测量系统由两个或多个测量模块组成。测量模块或测量单元或布置在测量单元中的评估单元可彼此通信并且可输出距离值或将其例如借助于现场总线系统(CAN、LIN等)传递到控制器,例如传递到车辆或机器控制器。为此,有利地,距离测量系统的现场总线系统电连接到机器或车辆的现场总线系统。这种级联是有利的,因为距离测量系统可设计或配置成具有非常灵活的结构或设计。距离测量系统可以单独地适用于不同的车辆或机器,即,使得例如测量模块的数量或各个测量模块之间的电缆连接的长度可自由地且非常灵活地配置。
如果使用测量模块的无线连接,则测量模块包括至少一个蓄电池以确保各个测量单元的电流供应。这里,距离测量系统中的各个测量模块借助于无线电信号(例如WLAN、蓝牙等)进行通信。测量模块的无线连接对于附接到车辆或机器是有利的,因为可能甚至更灵活地适应车辆或机器的状况,例如因为不需要电缆布线。
测量模块可同时或在时间上偏移地执行相应的距离测量,即,一个接一个地或以时间顺序或以基于优先级的方式执行。由于测量模块彼此电连接(有线或无线)并且因此可彼此交换数据的事实,所以可能执行距离的同时以及时间偏移或基于优先级(即,例如取决于测量模块的数量或布置)的测量。
另一实施例涉及一种具有如上所述的距离测量系统的车辆。根据实施例,车辆是移动式建筑或作业机器。例如,这可以是建筑车辆、建筑机器(挖掘机、起重机等)、道路建筑机器(修整机、给料机、压力机(辊压机)等)或其他移动车辆或机器。在此上下文中,在机场使用的交通工具也是可能的(例如,被拉起到停机位的移动楼梯等)。本发明的距离测量系统可用于在操作期间接近障碍物或物体的所有车辆和机器,其中,防止碰撞是重要的,或者其中,测量、检测或确定到障碍物或物体的距离。
根据实施例,车辆是具有可移动地布置在车辆上的工作笼的升降工作平台或消防车转台梯,其中,至少一个距离测量系统布置在工作笼上。升降工作平台例如是具有伸缩式起重机构的工作平台,或所谓的剪式载物台。消防车转台梯通常包括与可延伸梯一起移动的工作笼。这里,距离测量系统位于工作笼上的任何位置,并且测量到一个或多个物体或障碍物的距离。
根据实施例,可移动地布置在车辆上的工作笼包括地板和栏杆,并且至少一个距离测量系统布置在地板和/或栏杆上,或者集成在地板中和/或栏杆中。如果至少一个距离测量系统安装在地板和/或栏杆或轨道上,则此安装可以是可释放的,特别是在没有任何工具的情况下可释放,例如通过维可牢连接、夹紧连接、插头设备、粘合设备等。可替代地,距离测量系统例如可以螺纹连接、铆接或以任何其他方式安装在地板上和/或栏杆或轨道上。可能将至少一个距离测量系统或至少一个距离测量系统的部分布置在地板中和/或栏杆或轨道中。可以将工作笼的栏杆或轨道的各个部分认为是测量模块,测量单元或至少其部分结合或集成在该测量模块中,使得可以有利地省略单独测量模块形式的另外的机构。
附图说明
下面将基于附图讨论本发明的实施例。附图示出了:
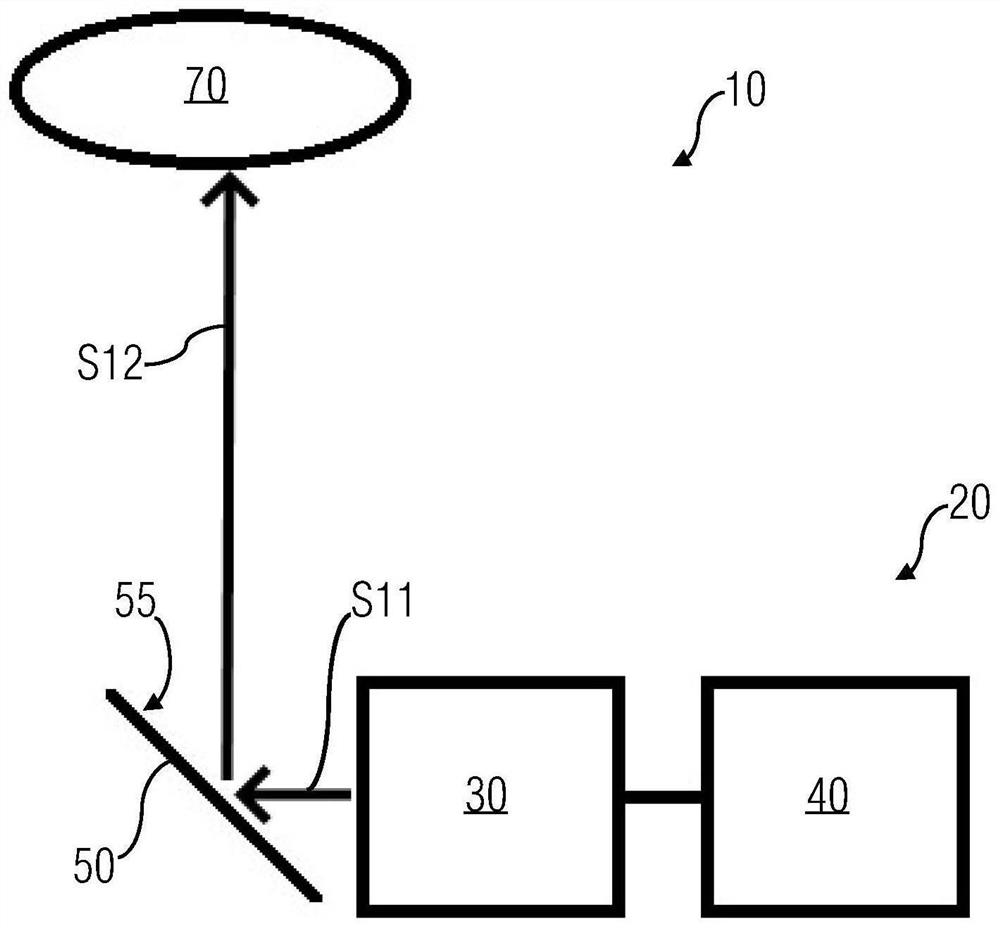
图1a、图1b是距离测量系统的功能原理的示意图;
图2是测量模块的示意图(截面);
图3是测量模块的示意图;
图4是反射器单元和保持器的示意图;以及
图5是具有距离测量系统的升降工作平台。
具体实施方式
在下面将基于附图更详细地讨论本发明的实施例之前,应注意,等同的元件提供有相同的附图标记,使得相同的描述是可互用的或可互换的。在距离测量中,到反射器表面55的距离必须结合在计算中,该反射器表面使由传感器单元30发射的信号S11在物体70或障碍物70的方向上偏转。由于在设计距离测量系统10时应当知道此距离值,所以该值例如可作为常数存储(例如保存)在评估装置40或传感器单元30中。
图1a和图1b均以示意图示出了距离测量系统10,以解释距离测量的基本操作模式。距离测量系统10包括用于非接触地确定到物体70(障碍物,例如墙壁、屋顶、挑檐等)的距离的测量单元20,其中,测量单元20基本上包括传感器单元30、评估单元40和信号偏转设备50。传感器单元30配置成发射信号S11、S12并接收由物体70反射的信号S21、S22。评估单元40例如基于信号运行时间,即基于所发射的信号S11、S12与所接收的信号S21、S22之间的时间差,从由传感器单元30发射的信号S11、S12和由其接收的信号S21、S22确定测量单元20与物体70之间的距离。布置在传感器单元30的区域中的信号偏转设备50包括与传感器单元30成大约45°的角度的反射器表面55,使得由传感器单元30发射的信号S11在撞击反射器表面55时在偏离信号S11的传播方向的方向上偏转,特别是在物体70的方向上与信号S11的传播方向基本上成直角地偏转。这里,反射器表面55相对于传感器单元30的角度可以具有大约40°至50°的范围或者大约30°至50°的范围。当撞击物体70时,偏转信号S12在该物体处被反射,并且当撞击反射表面55时,该信号在偏离反射信号S21的传播方向的方向上反射,特别是在传感器单元30的方向上与反射信号S21的传播方向基本上成直角地反射。现在,由偏转器表面55偏转的信号S22撞击传感器单元30,并且在那里由传感器头31(未示出)接收。传感器头31可以配置成发射信号S11并且接收由物体70反射并由信号偏转设备50偏转的信号S22。这里,既可以发射又可以接收(具有时间偏移)信号的传感器头或者具有单独的收发器的传感器头都是可能的,其中,不需要在发送和接收之间进行切换。例如,可使用超声波传感器头,其中,超声波以“波瓣形状”传播,如图5中示意性地示出的。这种“波瓣形状”传播在从传感器单元30或传感器头31到反射器表面55的短路径(距离)上的信号传播中不太重要,因为超声波波瓣不能在其截面中在短路径(距离)上传播,使得这对测量(即,距离测量)具有负面影响。
图2示出了测量模块60的示意图(截面),其中,测量单元20部分地布置在该测量模块中。测量模块60以纵向的方式配置,例如配置成测量束并且根据图2形成有矩形截面。评估单元40和传感器单元30(具有传感器头31)布置在测量模块60中,即结合或集成在测量模块60中。信号偏转设备50在测量模块60上布置在传感器单元30前面的区域中。如图2所示,信号偏转设备50包括以可释放的方式彼此连接的保持器51和反射器单元52,特别是在没有任何工具的情况下可释放。这里,保持器51以固定方式或以可释放方式安装在测量模块60的壳体上。包括反射器表面55的反射器单元52以可释放的方式布置在保持器51上,例如插在其上。
图3示出了具有部分地布置在其中的两个测量单元20的测量模块60的示意图。在测量模块60的侧向端部上布置有插塞连接器,以便借助于电缆连接以级联的方式布置另外的测量模块60,即,将其串联(菊花链)连接或将其彼此连接,使得产生两个或多个测量模块的距离测量系统10。类似于图2的描述,测量模块60以纵向的方式配置并且形成有矩形截面。这里,应注意,测量模块60也可具有圆形、正方形或类似的截面。测量模块60具有例如60cm的长度,或者在大约40cm至100cm范围内的长度,或者在大约40cm至大于100cm的范围内的长度。评估单元40和传感器单元30(图3中未示出)布置在测量模块60中,即结合或集成在测量模块60中。由以可移除方式(特别是在没有任何工具的情况下可移除的)彼此连接的保持器51和反射器单元52组成的信号偏转设备50布置在测量模块60上。信号偏转设备50包括在保持器51与反射器单元52之间的开口53或间隙53,使得例如当测量单元20或距离测量系统10定向成使得距离测量系统10上方的物体70将被检测到时,没有(雨)水保留在信号偏转设备50中。
例如,如果超声传感器头用于距离测量,则超声波通常“以波瓣形状”传播,例如如图5中示意性地示出并且已经在上面关于图1简要描述的。当将测量单元20布置在测量模块60中或上时,必须考虑超声波的“波瓣形状”传播,因为可能发生信号重叠(例如,如果两个测量单元20之间的距离过低),即,两个测量单元20的发射和/或反射的超声波瓣可能重叠。当两个相邻测量单元20以大约40cm的距离布置在测量模块60中或上时,例如从大约1.80m的测量距离(测量单元20与物体70之间)开始,发生超声波瓣的这种重叠(如实际测试中所示)。另一方面,超声波的“波瓣形状”传播具有距离测量系统10的大检测区域的优点,即,距离测量系统10检测尽可能多的物体70或障碍物70。
图4示出了反射器单元52和所分配的保持器51的示意图。根据图4,保持器51示出为具有插锁机构57的可释放单元,保持器51可借助于该可释放单元以可释放的方式附接到测量模块60。保持器51在中心具有传感器单元30(图4中未示出)所需的开口56。传感器单元30发射信号S11、S12穿过开口56并接收由物体70反射的信号S21、S22。反射器单元52包括反射器表面55并可以可释放的方式布置在保持器51上。为此,反射器单元52包括指向内部的两个侧向凹槽59,由此反射器单元52可插入到保持器51的侧向边缘58上。如图3中已经示出的,当保持器51和反射器单元52彼此连接时,信号偏转设备50包括开口53或间隙53。
图5示出了升降工作平台1,其具有可移动地布置在升降工作平台1上的起重机构2和工作笼80,其中,工作笼80可借助于起重机构2移动。工作笼80包括地板81和栏杆82以及控制面板83,工作笼中的人71可借助于该控制面板移动工作笼。此外,由两个测量模块60组成的距离测量系统10布置在升降工作平台1的工作笼80上,更准确地说布置在栏杆82上。距离测量系统10或两个测量模块60检测或测量到如图1所示的两个物体70、到墙壁70和到挑檐70的距离。根据图5的安装到栏杆82或轨道82的距离测量系统10或测量模块60可以可释放的方式安装,特别是在没有任何工具的情况下可释放,例如借助于维可牢(Velcro)连接、夹紧连接、插塞设备、粘合设备等。可替代地,距离测量系统10或测量模块60也可螺纹连接、枢转或以其他方式安装在栏杆82或轨道82上。也可能将距离测量系统10或距离测量系统10的部分布置在地板81上或中和/或栏杆82或轨道82中。
还可能在根据图5的升降工作平台1上布置延伸该距离测量系统10的另外的测量模块60,因为布置在升降工作平台1上的所有测量模块60都可借助于电缆连接或无线连接而彼此连接。这意味着,另外的测量模块60可布置在工作笼80上,例如布置在在地板81中或上、布置在轨道82中或上,而且布置在起重机构2或其他优选地可移动的机器部件中或上。“虚拟空间”通过在车辆上或机器上分别布置一个或多个测量模块60或者一个或多个距离测量系统10而产生,这意味着,例如升降平台1的工作笼80周围的所有或至少大部分区域由测量模块60或距离测量系统10检测(如果在车辆上或机器上布置多个单独的系统10)。这是有利的,因为例如升降工作平台1的工作笼80可在所有可能的方向上移动,其中,站在工作笼80上的人不能总是看到或检测到障碍物70。测量模块60可在其定向上自由地布置在机器1上,即垂直地或水平地以及在所有方向上。这没有限制。所有测量模块60可彼此电连接,并因此可形成整个距离测量系统10。由于测量模块60可以级联方式布置的事实,即串联连接(菊花链)或借助于电缆连接或无线连接而彼此连接,所以测量模块60或测量单元20或布置在测量单元中的评估装置40可能借助于现场总线系统(CAN、LIN等)彼此通信,和/或将距离值输出或传递到控制器,例如输出或传递到车辆或机器控制器。为此,有利地,距离测量系统20的现场总线系统电连接到机器或车辆的现场总线系统。如上所述的级联测量模块60是有利的,因为距离测量系统可以设计或配置成具有非常灵活的结构。其可单独地适应不同的车辆或机器,即,测量模块60的数量或单独的测量模块之间的电缆连接的长度可以自由地和非常灵活地设计。如果使用测量模块60的无线连接,则距离测量系统10中的各个测量模块60经由无线电信号而彼此通信,例如WLAN、蓝牙等。测量模块60的无线连接对于附接到车辆或机器是有利的,因为这里例如可能更灵活地适应车辆或机器的环境,因为不需要电缆布线。
上述实施例仅是对本发明原理的说明。应理解,本文描述的布置和细节的修改和变化对于本领域的其他技术人员将是显而易见的。因此,意图是本发明仅由所附专利权利要求的范围限制,而不是由通过本文实施例的描述和解释所呈现的具体细节限制。
- 用于车辆的距离测量系统
- 用于消除距离测量的虚假指示的距离测量系统