用于检测定子绕组故障和劣化的系统和方法
文献发布时间:2023-06-19 11:29:13
引言
本节中提供的信息是为了概括介绍本公开的背景的目的。在本节中描述的范围内,当前署名的发明人的工作,以及在提交时可能在其它方面不符合现有技术的描述方面,既不明确也不隐含地被认为是针对本公开的现有技术。
技术领域
本公开涉及车辆推进系统,并且更特别地涉及用于控制车辆电动马达的系统和方法。
背景技术
一些类型的车辆仅包括生成推进扭矩的内燃发动机。混合动力汽车既包括内燃发动机又包括一个或多个电动马达。一些类型的混合动力车辆利用电动马达和内燃发动机,以试图获得比仅使用内燃发动机时更高的燃料效率。一些类型的混合动力车辆利用电动马达和内燃发动机来获得比由内燃发动机自身可以获得的更大的扭矩输出。
混合动力车辆的一些示例类型包括并联混合动力车辆、串联混合动力车辆和其他类型的混合动力车辆。在并联混合动力车辆中,电动马达与发动机并联工作,并且将发动机的功率和里程优势与电动马达的效率和再生制动优势相结合。在串联混合动力汽车中,发动机驱动发电机为电动马达产生电力,并且电动马达驱动变速器。这允许电动马达承担发动机的一些功率责任,这可允许使用更小且可能更高效的发动机。
发明内容
在一特征中,车辆的诊断系统包括:电流命令模块,其被配置成基于马达扭矩请求、马达速度、直流(DC)总线电压,生成用于电动马达的d轴电流命令和用于电动马达的q轴电流命令;电压命令模块,其被配置成基于d轴电流命令和q轴电流命令,生成d轴电压命令和q轴电压命令;切换控制模块,其被配置成基于d轴电压命令和q轴电压命令来控制逆变器模块的切换,其中逆变器模块被配置成从DC总线向电动马达的定子绕组施加功率;以及故障模块,其被配置成当d轴电压命令小于电动马达的预定标称d轴电压时,选择性地指示电动马达的定子绕组劣化。
在进一步的特征中,故障模块被配置成当d轴电压命令为以下两者时指示电动马达的定子绕组劣化:小于预定标称d轴电压乘以第一预定标量值;以及大于预定标称d轴电压乘以第二预定标量值。
在进一步的特征中,第二预定标量值小于第一预定标量值。
在进一步的特征中,故障模块还被配置成当d轴电压命令小于预定标称d轴电压乘以第二预定标量值时,指示电动马达的定子绕组中存在故障。
在进一步的特征中,限制模块被配置成当定子绕组中存在故障时,将马达扭矩请求限制为预定最大扭矩。
在进一步的特征中,当定子绕组中不存在故障时,不将马达扭矩请求限制为预定最大扭矩。
在进一步的特征中,故障模块还被配置成当d轴电压命令大于预定标称d轴电压乘以第一预定标量值时,指示定子绕组没有劣化并且没有故障。
在进一步的特征中,故障模块被配置成当速度传感器、扭矩传感器和电流传感器中的一者已经发生故障时,禁止对电动马达的定子绕组的诊断。
在进一步的特征中,故障模块被配置成当以下至少各者中的至少一者时禁止对电动马达的定子绕组的诊断:电动马达的速度在预定速度范围之外;以及电动马达的扭矩在预定扭矩范围之外。
在进一步的特征中,基于预定速度范围和预定扭矩范围设置预定标称d轴电压。
在进一步的特征中,故障模块被配置成当d轴电压命令不在电动马达的d轴电压的预定百分比内时,禁止对电动马达的定子绕组的诊断。
在一特征中,一种诊断系统包括:电流命令模块,其被配置成基于马达扭矩请求、马达速度、直流(DC)总线电压,生成用于电动马达的d轴电流命令和用于电动马达的q轴电流命令;电压命令模块,其被配置成基于d轴电流命令和q轴电流命令,生成d轴电压命令和q轴电压命令;切换控制模块,其被配置成基于d轴电压命令和q轴电压命令来控制逆变器模块的切换,其中,逆变器模块被配置成从DC总线向电动马达的定子绕组施加功率;健康状态(SOH)模块,其被配置成基于d轴电压命令,确定对应于定子绕组的SOH的SOH值;以及故障模块,其被配置成基于所述SOH值选择性地指示所述电动马达的定子绕组劣化。
在进一步的特征中,故障模块被配置成当SOH值小于第一预定值且大于第二预定值时指示定子绕组劣化,第二预定值小于第一预定值。
在进一步的特征中,故障模块还被配置成当SOH值小于第二预定值时指示定子绕组中存在故障。
在进一步的特征中,限制模块被配置成当定子绕组中存在故障时,将马达扭矩请求限制为预定最大扭矩。
在进一步的特征中,当定子绕组中不存在故障时,不将马达扭矩请求限制为预定最大扭矩。
在进一步的特征中,故障模块还被配置成当SOH大于第一预定值时指示定子绕组没有劣化并且没有故障。
在进一步的特征中,SOH模块被配置成进一步基于电动马达的预定标称d轴电压来确定SOH值。
在进一步的特征中,SOH模块被配置成基于(a)除以(b)来确定SOH值,其中(a)是当电动马达的速度在预定速度范围内且电动马达的扭矩在预定扭矩范围内时d轴电压命令中的N个的平均值,其中N是大于1的整数;并且(b)是预定的标称d轴电压。
在进一步的特征中,基于预定速度范围和预定扭矩范围设置预定标称d轴电压。
本发明提供了以下技术方案:
1. 一种车辆的诊断系统,包括:
电流命令模块,其被配置成基于马达扭矩请求、马达速度、直流(DC)总线电压生成用于电动马达的d轴电流命令和用于所述电动马达的q轴电流命令;
电压命令模块,其被配置成基于所述d轴电流命令和所述q轴电流命令,生成d轴电压命令和q轴电压命令;
切换控制模块,其被配置成基于所述d轴电压命令和所述q轴电压命令来控制逆变器模块的切换,
其中,所述逆变器模块被配置成从所述DC总线向所述电动马达的定子绕组施加功率;和
故障模块,其被配置成当所述d轴电压命令小于所述电动马达的预定标称d轴电压时,选择性地指示所述电动马达的定子绕组劣化。
2. 根据技术方案1所述的诊断系统,其中,所述故障模块被配置成当所述d轴电压命令为以下两者时指示所述电动马达的定子绕组劣化:
小于所述预定标称d轴电压乘以第一预定标量值;和
大于所述预定标称d轴电压乘以第二预定标量值。
3. 根据技术方案2所述的诊断系统,其中,所述第二预定标量值小于所述第一预定标量值。
4. 根据技术方案2所述的诊断系统,其中,所述故障模块还被配置成:当所述d轴电压命令小于所述预定标称d轴电压乘以所述第二预定标量值时,指示所述电动马达的定子绕组中存在故障。
5. 根据技术方案2所述的诊断系统,还包括限制模块,所述限制模块被配置成:当所述定子绕组中存在故障时,将所述马达扭矩请求限制为预定最大扭矩。
6. 根据技术方案5所述的诊断系统,其中,当所述定子绕组中不存在故障时,不将所述马达扭矩请求限制为预定最大扭矩。
7. 根据技术方案2所述的诊断系统,其中,所述故障模块还被配置成当所述d轴电压命令大于预定标称d轴电压乘以第一预定标量值时,指示所述定子绕组没有劣化并且没有故障。
8. 根据技术方案1所述的诊断系统,其中,所述故障模块被配置成当速度传感器、扭矩传感器和电流传感器中的一者发生故障时,禁止对所述电动马达的定子绕组的诊断。
9. 根据技术方案1所述的诊断系统,其中,所述故障模块被配置成在以下各者中的至少一者时禁止对所述电动马达的定子绕组的诊断:
所述电动马达的速度在预定速度范围之外;和
所述电动马达的扭矩在预定扭矩范围之外。
10. 根据技术方案9所述的诊断系统,其中,所述预定标称d轴电压是基于所述预定速度范围和所述预定扭矩范围设置的。
11. 根据技术方案1所述的诊断系统,其中,所述故障模块被配置成当所述d轴电压命令不在所述电动马达的d轴电压的预定百分比内时,禁止对所述电动马达的定子绕组的诊断。
12. 一种诊断系统,包括:
电流命令模块,其被配置成基于马达扭矩请求、马达速度、直流(DC)总线电压,生成用于电动马达的d轴电流命令和用于所述电动马达的q轴电流命令;
电压命令模块,其被配置成基于所述d轴电流命令和所述q轴电流命令,生成d轴电压命令和q轴电压命令;
切换控制模块,其被配置成基于所述d轴电压命令和所述q轴电压命令来控制逆变器模块的切换,
其中,所述逆变器模块被配置成从DC总线向所述电动马达的定子绕组施加功率;
健康状态(SOH)模块,其被配置成基于所述d轴电压命令,确定对应于所述定子绕组的SOH的SOH值;和
故障模块,其被配置成基于所述SOH值选择性地指示所述电动马达的定子绕组劣化。
13. 根据技术方案12所述的诊断系统,其中,所述故障模块被配置成当所述SOH值小于第一预定值且大于第二预定值时,指示所述定子绕组劣化,所述第二预定值小于所述第一预定值。
14. 根据技术方案13所述的诊断系统,其中,所述故障模块还被配置成当所述SOH值小于所述第二预定值时,指示所述定子绕组中存在故障。
15. 根据技术方案14所述的诊断系统,还包括限制模块,所述限制模块被配置成当定子绕组中存在故障时,将马达扭矩请求限制为预定最大扭矩。
16. 根据技术方案15所述的诊断系统,其中,当定子绕组中不存在故障时,不将所述马达扭矩请求限制为预定最大扭矩。
17. 根据技术方案13所述的诊断系统,其中,所述故障模块还被配置成当所述SOH大于所述第一预定值时,指示所述定子绕组没有劣化并且没有故障。
18. 根据技术方案12所述的诊断系统,其中,所述SOH模块被配置成进一步基于所述电动马达的预定标称d轴电压来确定所述SOH值。
19. 根据技术方案18所述的诊断系统,其中,所述SOH模块被配置成基于(a)除以(b)来确定所述SOH值,其中
(a)是当所述电动马达的速度在预定速度范围内且电动马达的扭矩在预定扭矩范围内时,d轴电压命令中的N个的平均值,
其中,N是大于1的整数;和
(b)是所述预定标称d轴电压。
20. 根据技术方案19所述的诊断系统,其中,所述预定标称d轴电压是基于所述预定速度范围和所述预定扭矩范围设置的。
从详细描述、权利要求和附图中,本公开的进一步的应用领域将变得显而易见。详细描述和具体示例仅旨在说明的目的,并不旨在限制本公开的范围。
附图说明
从详细描述和随附附图中,将会更全面地理解本公开,其中:
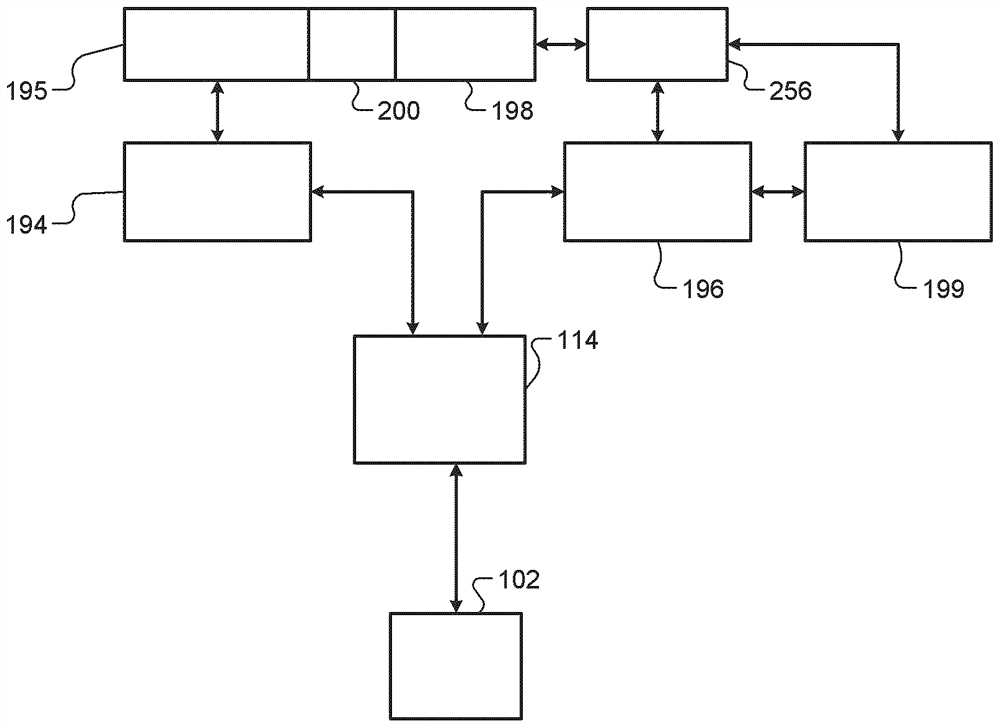
图1是示例车辆系统的功能框图;
图2是示例推进控制系统的功能框图;
图3是包括逆变器模块和电池的示例实施方式的示意图;
图4是包括马达控制模块的示例实施方式的功能框图;
图5是电流命令模块的示例实施方式的功能框图;
图6是电压命令模块的示例实施方式的功能框图;
图7是描绘诊断电动马达的定子绕组中的劣化和故障的示例方法的流程图;以及
图8是描绘确定电动马达的定子绕组的健康状态(SOH)并基于SOH诊断定子绕组中的劣化和故障的示例方法的流程图。
在附图中,附图标记可能被重复使用以标识相似和/或相同的元件。
具体实施方式
车辆的内燃发动机在气缸内燃烧空气和燃料以生成推进扭矩。发动机经由变速器向车轮输出扭矩。一些类型的车辆可能不包括内燃发动机,或者内燃发动机可能不与车辆的传动系机械联接。
电动马达机械地联接到变速器的轴。在一些情况下,车辆的控制模块可从电池向电动马达施加功率,以使电动马达输出用于车辆推进的扭矩。在其他情况下,控制模块可禁止流向电动马达功率流,并允许变速器驱动电动马达的旋转。电动马达在由变速器驱动时生成功率。当经由电动马达生成的电压大于电池电压时,由电动马达生成的功率可以用于对电池充电。
控制模块基于电动马达的请求扭矩输出来确定用于电动马达的d轴(直轴)电流指令和q轴(正交轴)电流指令。控制模块基于d轴和q轴电流指令来确定d轴和q轴电压指令。控制模块基于d轴和q轴电压指令来控制逆变器的切换。
然而,定子绕组的诊断可能无法与相关联传感器的诊断相隔离。另外,定子绕组的诊断可能被限制为诊断定子绕组中是否存在故障。当诊断出故障时,电动马达的扭矩输出可能受到限制。因此,当诊断出故障时,车辆的可操作性可受到限制。
本申请涉及在定子绕组中出现故障之前诊断电动马达的定子绕组的劣化。这可允许车辆操作者在故障发生且车辆的可操作性受到限制之前的一段时间(例如,寻求车辆服务)内不受限制地操作车辆。本申请还将传感器故障与关于定子绕组的诊断隔离。
现在参考图1,呈现了示例车辆系统的功能框图。虽然示出并将描述用于混合动力车辆的车辆系统,但是本公开也适用于不包括内燃发动机的电动车辆、燃料电池车辆、自主车辆和其他类型的车辆。此外,虽然提供了车辆的示例,但是本申请也适用于包括电动马达的非车辆实施方式。
发动机102可燃烧空气/燃料混合物以生成驱动扭矩。发动机控制模块(ECM)114控制发动机102。例如,ECM 114可控制发动机致动器的致动,所述发动机致动器诸如是节气门、一个或多个火花塞、一个或多个燃料喷射器、阀致动器、凸轮轴移相器、废气再循环(EGR)阀、一个或多个增压装置和其他合适的发动机致动器。在一些类型的车辆(例如,电动车辆)中,发动机102可省略。
发动机102可向变速器195输出扭矩。变速器控制模块(TCM)194控制变速器195的操作。例如,TCM 194可控制变速器195和一个或多个扭矩传递装置(例如,变矩器、一个或多个离合器等)内的齿轮选择。
车辆系统包括一个或多个电动马达,诸如电动马达198。在给定的时间处,电动马达既可以用作发电机抑或用作马达。当作为发电机时,电动马达将机械能转化为电能。电能可以例如用于给电池199充电。当用作马达时,电动马达生成可用于例如车辆推进的扭矩。虽然提供了一个电动马达的示例,但是车辆可包括多于一个的电动马达。
马达控制模块196控制从电池199到电动马达198以及从电动马达198到电池199的功率流。马达控制模块196将来自电池199的电功率施加到电动马达198,以使电动马达198输出正扭矩,诸如用于车辆推进。电池199可包括例如一个或多个电池和/或电池组。
电动马达198可例如向变速器195的输入轴或向变速器195的输出轴输出扭矩。离合器200可被接合以将电动马达198联接到变速器195,并且脱离以将电动马达198从变速器195分离。可在离合器200的输出和变速器195的输入之间实施一个或多个齿轮装置,以在电动马达198的旋转和变速器195的输入的旋转之间提供预定的比率。
马达控制模块196还可选择性地将车辆的机械能转换成电能。更具体地,当电动马达198正在由变速器195驱动并且马达控制模块196没有从电池199向电动马达198施加功率时,电动马达198经由反EMF生成并输出功率。马达控制模块196可经由通过电动马达198输出的功率给电池199充电。这可称为再生。
现在参考图2,呈现了示例推进控制系统的功能框图。驾驶员扭矩模块204基于驾驶员输入212来确定驾驶员扭矩请求208。驾驶员输入212可包括例如加速踏板位置(APP)、制动踏板位置(BPP)、巡航控制输入和/或自主输入。在各种实施方式中,巡航控制输入可由自适应巡航控制系统提供,该自适应巡航控制系统试图保持车辆和车辆路径中的物体之间的至少预定距离。自主输入可由自主驾驶系统提供,该系统控制车辆在避开物体和其他车辆的同时从一个位置到另一个位置的移动。驾驶员扭矩模块204基于将驾驶员输入与驾驶员扭矩请求相关联的一个或多个查找表来确定驾驶员扭矩请求208。可分别使用一个或多个APP传感器和BPP传感器来测量APP和BPP。
驾驶员扭矩请求208可以是车轴扭矩请求。车轴扭矩(包括车轴扭矩请求)是指车轮处的扭矩。如下文进一步讨论的,推进扭矩(包括推进扭矩请求)不同于车轴扭矩,因为推进扭矩可指代变速器输入轴处的扭矩。
车轴扭矩仲裁模块216在驾驶员扭矩请求208和其他车轴扭矩请求220之间进行仲裁。车轴扭矩(车轮处的扭矩)可由各种来源产生,这些来源包括发动机102和/或一个或多个电动马达,诸如电动马达198。其他车轴扭矩请求220的示例包括但不限于,当检测到正车轮打滑时,牵引控制系统请求的扭矩减小、用以抵消负车轮打滑的扭矩增加请求、用以确保车轴扭矩不超过车辆停止时制动器保持车辆的能力的减少车轴扭矩的制动管理请求、以及用以减少车轴扭矩以防止车辆超过预定速度的车辆超速扭矩请求。车轴扭矩仲裁模块216基于接收到的车轴扭矩请求208和220之间的仲裁结果来输出一个或多个车轴扭矩请求224。
在混合动力车辆中,混合动力模块228可确定所述一个或多个车轴扭矩请求224中有多少应由发动机102产生,以及所述一个或多个车轴扭矩请求224中有多少应由电动马达198产生。为了简单起见,将继续电动马达198的示例,但是可使用多个电动马达。混合模块228向推进扭矩仲裁模块236输出一个或多个发动机扭矩请求232。发动机扭矩请求232指示发动机102的请求扭矩输出。
混合模块228还向马达控制模块196输出马达扭矩请求234。马达扭矩请求234指示电动马达198的请求扭矩输出(正或负)。在省略发动机102的车辆(例如,电动车辆)或发动机102不被连接以输出用于车辆的推进扭矩的车辆中,车轴扭矩仲裁模块216可输出一个车轴扭矩请求,并且马达扭矩请求234可等于该车轴扭矩请求。在电动车辆的示例中,可省略ECM 114,并且驾驶员扭矩模块204和车轴扭矩仲裁模块216可在马达控制模块196内实施。
推进扭矩仲裁模块236将发动机扭矩请求232从车轴扭矩域(车轮处的扭矩)转换成推进扭矩域(例如,变速器输入轴处的扭矩)。推进扭矩仲裁模块236将转换后的扭矩请求与其他推进扭矩请求240进行仲裁。其他推进扭矩请求240的示例包括但不限于发动机超速保护所需的扭矩减少和失速防止所需的扭矩增加。作为仲裁的结果,推进扭矩仲裁模块236可输出一个或多个推进扭矩请求244。
致动器控制模块248基于推进扭矩请求244来控制发动机102的致动器252。例如,基于推进扭矩请求244,致动器控制模块248可控制节气门的打开、火花塞提供的火花的正时、燃料喷射器喷射的燃料的正时和量、气缸致动/停用、进气门和排气门定相、一个或多个增压装置的输出(例如,涡轮增压器、增压器等)、EGR阀的打开和/或一个或多个其他发动机致动器。在各种实施方式中,推进扭矩请求244可在被致动器控制模块248使用之前被调节或修改,诸如以产生扭矩储备。
马达控制模块196基于马达扭矩请求234来控制逆变器模块256的切换。逆变器模块256的切换控制从电池199到电动马达198的功率流。这样,逆变器模块256的切换控制电动马达198的扭矩。逆变器模块256还转换由电动马达198生成的功率,并将功率输出到电池199,例如,以对电池199充电。
逆变器模块256包括多个开关。马达控制模块196切换开关以将来自电池199的DC功率转换成交流(AC)功率,并将AC功率施加到电动马达198以驱动电动马达198。例如,逆变器模块256可将来自电池199的DC功率转换成n相AC功率,并将n相AC功率施加到电动马达198的(例如, a、b和c、或u、v和w)n定子绕组。在各种实施方式中,n等于3。经由通过定子绕组的电流产生的磁通量驱动电动马达198的转子。转子连接到电动马达198的输出轴并驱动其旋转。
在各种实施方式中,一个或多个滤波器可电连接在逆变器模块256和电池199之间。所述一个或多个滤波器可被实施成例如对进出电池199的功率流进行滤波。作为示例,包括一个或多个电容器和电阻器的滤波器可与逆变器模块256和电池199并联电连接。
图3包括包括逆变器模块256和电池199的示例实施方式的示意图。高(正)侧304和低(负)侧308分别连接到电池199的正极和负极端子。逆变器模块256也连接在高侧304和低侧308之间。
逆变器模块256包括三条支路,一条支路连接到电动马达198的一个相。第一支路312包括第一开关316和第二开关320。开关316和320各自包括第一端子、第二端子和控制端子。开关316和320中的每一者可以是绝缘栅双极晶体管(IGBT)、场效应晶体管(FET)(诸如金属氧化物半导体FET(MOSFET))、或者另一种合适类型的开关。在IGBT和FET的示例中,控制端子被称为栅极。
第一开关316的第一端子连接到高侧304。第一开关316的第二端子连接到第二开关320的第一端子。第二开关320的第二端子可连接到低侧308。连接到第一开关316的第二端子和第二开关320的第一端子的节点连接到电动马达198的第一相(例如,a)。
第一支路312还包括分别与开关316和320反并联连接的第一二极管324和第二二极管328。换句话说,第一二极管324的阳极连接到第一开关316的第二端子,并且第一二极管324的阴极连接到第一开关316的第一端子。第二二极管328的阳极连接到第二开关320的第二端子,并且第二二极管328的阴极连接到第二开关320的第一端子。当开关316和320关断(以及断开)时,当电动马达198的输出电压大于电池199的电压时,由电动马达198生成的功率通过二极管324和328传输。这给电池199充电。二极管324和328形成三相整流器的一相。
逆变器模块256还包括第二支路332和第三支路336。第二支路332和第三支路336可(在电路方面)类似于或等同于第一支路312。换句话说,第二支路332和第三支路336可各自包括相应的开关和二极管,如开关316和320以及二极管324和328,它们以与第一支路312相同的方式连接。例如,第二支路332包括开关340和344以及反并联二极管348和352。连接到开关340的第二端子和开关344的第一端子的节点连接到电动马达198的第二定子绕组(例如,b)。第三支路336包括开关356和360以及反并联二极管364和368。连接到开关356的第二端子和开关360的第一端子的节点连接到电动马达198的第三定子绕组(例如,c)。
图4是包括马达控制模块196的示例实施方式的功能框图。切换控制模块404使用脉宽调制(PWM)信号来控制开关316和320的切换。例如,切换控制模块404可向开关316、320、340、344、356和360的控制端子施加PWM信号。当接通时,功率从电池199流向电动马达198以驱动电动马达198。
例如,当从电池199向电动马达198施加功率时,切换控制模块404可向开关316和320的控制端子施加大致互补的PWM信号。换句话说,施加到第一开关316的控制端子的PWM信号的极性与施加到第二开关320的控制端子的PWM信号的极性相反。然而,当开关316和320中的一者的接通与开关316和320中的另一者的断开重叠时,短路电流可流动。这样,切换控制模块404可生成PWM信号,以在开关316和320中的任一者接通之前的空载时段期间断开开关316和320两者。考虑到这一点,通常互补可意味着当功率被输出到电动马达198时,两个信号在其大部分时段内具有相反的极性。然而,在转换前后,两个PWM信号在一些重叠空载时段内可具有相同的极性(关断)。
提供给第二支路332和第三支路336的开关的PWM信号通常也可以是每个支路互补的。提供给第二支路332和第三支路336的PWM信号可彼此相移,并且可与提供给第一支路312的开关316和320的PWM信号相移。例如,用于每个支路的PWM信号可彼此相差120°(360°/3支路=每个支路120°)。这样,通过电动马达198的定子绕组(相)的电流彼此相移120°。
电流命令模块408基于马达扭矩请求234、电动马达198的(机械)转子速度432和DC总线电压410来确定用于电动马达198的d轴电流命令(Id命令)和q轴电流命令(Iq命令)。d轴电流命令和q轴电流命令由图4中的412共同图示。电压传感器411测量电池199和逆变器模块256之间的DC总线电压410(例如,在高侧304和低侧308之间),诸如DC总线电容器380两端的电压。沿DC场方向的场绕组的轴称为转子直轴或d轴。d轴后90度的轴称为正交轴或q轴。
转子速度432是电动马达198的转子的(机械)旋转速度。转子速度432可例如使用转子速度传感器436来测量。在各种实施方式中,转子速度432可由转子速度模块基于一个或多个其他参数来确定,诸如转子位置随时间的变化,其中位置基于电动马达198的相电流440(例如,Ia、Ib、Ic)来确定。在各种实施方式中,转子速度传感器436可确定转子的位置,并且转子速度传感器436(或速度模块,诸如马达控制模块196的速度模块)可基于转子位置随时间的变化来确定转子速度432(例如,使用位置相对于时间的数学导数)。电流传感器442可测量相电流440,诸如在逆变器模块256的相应支路中的相电流。在各种实施方式中,可估计一个或多个相电流440。
图5包括电流命令模块408的示例实施方式的功能框图。限制模块504基于马达扭矩请求234输出受限马达扭矩请求508。当马达扭矩请求234小于或等于预定最大扭矩时,限制模块504将受限马达扭矩请求508设置为马达扭矩请求234。当马达扭矩请求234大于预定的最大扭矩时,限制模块504将受限马达扭矩请求508设置为预定最大扭矩。预定最大扭矩是可校准的,并且可被设置为例如电动马达198的最大输出扭矩的预定百分比(小于100%,诸如10%或另一合适的百分比)。
选择模块512基于选择信号520的状态将选定的马达扭矩请求516设置为受限马达扭矩请求508抑或马达扭矩请求234。例如,当选择信号520处于第一状态时,选择模块512将选定的马达扭矩请求516设置为马达扭矩请求234。当选择信号520处于第二状态时,选择模块512将选定的马达扭矩请求516设置为受限马达扭矩请求。当选择信号520处于第二状态时,这将选定的马达扭矩请求516限制为预定最大扭矩。选择信号520的设置在下面进一步讨论。
电流确定模块524基于选定的马达扭矩请求516、电动马达198的转子速度432和DC总线电压410来确定q轴电流命令528和d轴电流命令532。电流确定模块524可确定d轴和q轴电流命令532和528,例如,使用将DC总线电压、速度和扭矩请求与d轴和q轴电流命令相关联的一个或多个等式和/或查找表。
回头参考图4,电压命令模块456基于d轴电流命令532、q轴电流命令528、电动马达198的d轴电流和电动马达198的q轴电流来确定用于电动马达198的电压命令。d轴电压命令和q轴电压命令在图4中由460共同图示。在各种实施方式中,电压命令模块456可使用闭环控制来生成电压命令460,以将d轴电流444和q轴电流444分别朝向d轴电流命令和q轴电流命令412调节或调节到d轴电流命令和q轴电流命令412。参考系(FOR)模块448可通过应用克拉克(Clarke)变换和帕克(Park)变换将相电流440变换成d轴和q轴电流444。
图6是电压命令模块456的示例实施方式的功能框图。误差模块604基于q轴电流命令528和q轴电流612之间的差来确定第一(Iq)误差608。误差模块604可例如基于或等于q轴电流命令528减去q轴电流612或者基于或等于q轴电流612减去q轴电流命令528来设置第一误差608。比例积分(PI)模块616基于第一误差608生成q轴电压命令620,以将第一误差608朝向零调节或调节到零。虽然讨论了PI模块616的示例,但是可使用另一种类型的闭环控制。
误差模块624基于d轴电流命令532和d轴电流632之间的差来确定第二(Id)误差628。误差模块624可例如基于或等于d轴电流命令532减去d轴电流632或者基于或等于d轴电流632减去d轴电流命令532来设置第二误差628。比例积分(PI)模块636基于第二误差628来生成d轴电压命令640,以将第二误差628朝向零调节或调节到零。虽然讨论了PI模块636的示例,但是可使用另一种类型的闭环控制。
回头参考图4,切换控制模块404基于d轴和q轴电压命令来确定要向电动马达198的各相施加的PWM信号的最终占空比。例如,切换控制模块404可使用将电压命令与PWM占空比相关联的一个或多个等式或查找表来确定初始占空比命令。切换控制模块404基于PWM占空比来对逆变器模块256的开关进行切换。
扭矩传感器468可测量电动马达198的当前扭矩469。在各种实施方式中,可基于一个或多个其他参数来估计当前扭矩469。
切换控制模块404基于d轴和q轴电压命令来确定要向电动马达198的各相施加的PWM信号的最终占空比。例如,切换控制模块404可使用将电压命令与PWM占空比相关联的一个或多个等式或查找表来确定初始占空比命令。切换控制模块404基于PWM占空比来对逆变器模块256的开关进行切换。
健康状态(SOH)模块470确定代表电动马达198的定子绕组的SOH的SOH(值)474。选择模块480基于SOH 474生成选择信号520。故障模块482确定并指示电动马达198的定子绕组是否劣化或包括故障。
图7是描绘诊断电动马达198的定子绕组中的劣化和故障的示例方法的流程图。控制从704开始,其中故障模块482确定下面使用的传感器中的一个或多个是否已经被诊断出有故障。例如,故障模块482可确定指示传感器(例如,速度传感器436、扭矩传感器468、电流传感器442)中的故障的一个或多个预定的故障诊断码(DTC)是否已分别存储在车辆的存储器中。如果704为真,则故障模块482禁止对电动马达198的定子绕组的诊断,并且控制可结束。如果704为假,则控制可继续到708。
在708处,故障模块482确定转子速度432是否在预定速度范围内,并且电动马达198的扭矩是否在预定扭矩范围内。如果708为假,则故障模块482禁止对电动马达198的定子绕组的诊断,并且控制可结束。如果708为真,则控制继续到712。该扭矩可以是例如电动马达198的当前扭矩469或选定的马达扭矩请求516。预定的速度和扭矩范围是可校准的。预定速度范围大于每分钟零转(rpm),并且可以是例如3000-10000 rpm或另一个合适的速度范围。预定扭矩范围接近零牛顿米(Nm),并且可以是例如+/- 1 Nm或其他合适的扭矩范围。
在712处,故障模块482确定d轴电压命令640是否等于或近似等于电动马达198的当前d轴电压。如果712为假,则故障模块482禁止对电动马达198的定子绕组的诊断,并且控制可结束。如果712为真,则控制继续到716。故障模块482可例如基于d轴和q轴电流444来确定当前的d轴电压。故障模块482可例如使用将d轴和q轴电流与d轴电压相关联的等式和查找表中的一者来确定当前d轴电压。当d轴电压命令640在d轴电压的预定百分比内时,故障模块482可认为d轴电压命令640(d电压命令)近似等于当前d轴电压(d电压)。预定百分比可以是可校准的,并且可以是例如5%、小于5%或另一个合适的值。
在716处,故障模块482确定d轴电压命令640是否小于或等于电动马达198的预定标称(d轴)电压乘以第一预定标量值(值1)。基于预定速度和扭矩范围来校准预定标称电压。预定标称电压是固定值,其对应于当电动马达198的速度和扭矩在预定速度和扭矩范围内时期间电动马达198的标称电压。第一预定标量值是可校准的,并且是小于1.0的值。第一预定标量值可以是例如0.8或另一个合适的值。如果716为真,则故障模块482在720处指示定子绕组中不存在故障(或劣化),并且控制可结束。例如,在720处,故障模块482可将存储器中的与定子绕组相关联的故障标志设置为第一状态。如果716为假,则控制转移到724。
在724处,故障模块482确定d轴电压命令640是否小于或等于电动马达198的预定标称(d轴)电压乘以第二预定标量值(值2)。第二预定标量值是可校准的,并且是小于1.0且小于第一预定标量值的值。第二预定标量值可以是例如0.5或另一个合适的值。如果724为真,则故障模块482在728处指示电动马达198的定子绕组劣化(但还没有故障),并且控制可结束。例如,在728处,故障模块482可将故障标志设置为第二状态。
当定子绕组劣化时,故障模块482还可采取一个或多个其他补救措施。例如,故障模块482可以打开警告装置486,以警告车辆驾驶员定子绕组劣化。警告装置486可以是例如视觉警告装置(例如,故障指示灯(MIL)或显示器)、听觉警告装置(例如,一个或多个扬声器)和/或触觉警告装置(例如,一个或多个振动装置)。故障模块482可附加地或替代地提示与车辆相关联的用户安排对车辆的维护(例如,用于更换整个电动马达198或定子绕组)。故障模块482可例如通过向与用户相关联的电话号码发送消息、向与用户相关联的电子邮件地址发送电子邮件或以其他合适的方式来提示用户。
如果724为假,则故障模块482在730处指示定子绕组中存在故障,并且控制可结束。例如,在728处,故障模块482可将故障标志设置为第三状态。选择模块480还可在730处将选择信号520设置为第二状态,使得经由将受限的马达扭矩请求508限制为预定最大马达扭矩并将选定的马达扭矩请求516设置为受限的马达扭矩请求508,将选定的马达扭矩请求516限制为预定最大马达扭矩。
当定子绕组中存在故障时,故障模块482还可采取一个或多个其他补救措施。例如,故障模块482可打开警告装置486,以警告车辆驾驶员定子绕组有故障。故障模块482可附加地或替代地提示与车辆相关联的用户安排对车辆的维护(例如,用于更换整个电动马达198或定子绕组)。故障模块482可例如通过向与用户相关联的电话号码发送消息、向与用户相关联的电子邮件地址发送电子邮件或以其他合适的方式来提示用户。故障模块482可经由一个或多个收发器(诸如收发器490(例如,蜂窝收发器))发送消息、电子邮件或其他数据。虽然控制被示出和讨论为结束,但是图7的示例可说明一个控制回路,并且控制可以返回到704。
图8是描绘确定定子绕组的SOH并基于SOH来诊断电动马达198的定子绕组中的劣化和故障的示例方法的流程图。控制从804开始,在804处,SOH模块470确定转子速度432是否在预定速度范围内,并且电动马达198的扭矩是否在预定扭矩范围内。如果804为假,则SOH模块470不更新电动马达的SOH 474,并且故障模块482基于 SOH 474禁止对电动马达198的定子绕组的诊断。控制可结束。如果804为真,则控制可继续到808。
在808处,SOH模块470存储d轴电压命令640。在812处,SOH模块470更新平均d轴电压命令。SOH模块470基于d轴电压命令640的N个最近存储的值的平均值来确定d轴电压命令。例如,SOH模块470可将d轴电压命令640的N个最近存储的值相加,并将该和除以N。N是大于1的整数,并且可以是例如10或另一个合适的值。
在816处,SOH模块470确定定子绕组的SOH 474。SOH模块470基于平均d轴电压命令和预定标称电压来确定SOH 474。SOH模块470可确定SOH 474,例如,使用将平均d轴电压命令和预定标称电压与SOH相关联的等式和查找表中的一者。例如,SOH模块470可基于或等于平均d轴电压命令除以预定标称电压来设置SOH 474。SOH 474可以是0和1之间的值,并且反映定子绕组的当前SOH。当前SOH可随着SOH 474的增加而增加,并且可随着SOH 474的减少而减少。故障模块482可经由一个或多个收发器(诸如收发器490)将SOH 474传输到远程位置,例如远程服务器。
在820处,故障模块482确定SOH 474是否小于第二预定值(值2)。第二预定值是可校准的,并且在SOH 474在0和1之间的示例中小于1。仅作为示例,第二预定值可以是0.8、0.85或另一个合适的值。如果820为假,则控制转移到828。如果820为真,则故障模块482在824处指示定子绕组中存在故障,并且控制可结束。例如,在824处,故障模块482可将故障标志设置为第三状态。选择模块480还可在824处将选择信号520设置为第二状态,使得经由将受限马达扭矩请求508限制为预定最大马达扭矩并将选定的马达扭矩请求516设置为受限马达扭矩请求508,将选定马达扭矩请求516限制为预定最大马达扭矩。
当定子绕组中存在故障时,故障模块482还可采取一个或多个其他补救措施。例如,故障模块482可打开警告装置486,以警告车辆驾驶员定子绕组有故障。故障模块482可附加地或替代地提示与车辆相关联的用户安排对车辆的维护(例如,用于更换整个电动马达198或定子绕组)。故障模块482可例如通过向与用户相关联的电话号码发送消息、向与用户相关联的电子邮件地址发送电子邮件或以其他合适的方式来提示用户。
在828处,故障模块482确定SOH 474是否小于第一预定值(值1)。第一预定值大于第二预定值,并且在SOH 474在0和1之间的示例中小于1。第一预定值可以是例如0.9、0.95或另一个合适的值。如果828为假,则故障模块482在836处指示定子绕组中不存在故障(或劣化),并且控制可结束。例如,在836处,故障模块482可将故障标志设置为第一状态。如果828为真,则故障模块482在832处指示电动马达198的定子绕组劣化(但还没有故障),并且控制可结束。例如,在832处,故障模块482可将故障标志设置为第二状态。
当定子绕组劣化时,故障模块482还可采取一个或多个其他补救措施。例如,故障模块482可以打开警告装置486,以警告车辆驾驶员定子绕组劣化。故障模块482可附加地或替代地提示与车辆相关联的用户安排对车辆的维护(例如,用于更换整个电动马达198或定子绕组)。故障模块482可例如通过向与用户相关联的电话号码发送消息、向与用户相关联的电子邮件地址发送电子邮件或以其他合适的方式来提示用户。
虽然控制被示出和讨论为结束,但是图8的示例可说明一个控制回路,并且控制可返回到804。
前面的描述本质上仅仅是说明性的,并且不旨在限制本公开、其应用或用途。本公开的广泛教导可以以各种形式实施。因此,尽管本公开包括特定的示例,但是本公开的真实范围不应如此限制,因为在研究附图、说明书和下面的权利要求后,其他修改将变得显而易见。应当理解,在不改变本公开的原理的情况下,方法中的一个或多个步骤可以以不同的顺序(或同时)执行。此外,尽管每个实施例在上面被描述为具有某些特征,但是关于本公开的任何实施例描述的那些特征中的任何一个或多个可以在任何其他实施例中实施和/或与任何其他实施例的特征相结合,即使该结合没有被明确描述。换句话说,所描述的实施例不是相互排斥的,并且一个或多个实施例彼此的置换仍在本公开的范围内。
元件之间的空间和功能关系(例如,模块、电路元件、半导体层等之间的关系)使用各种术语来描述,包括“连接”、“接合”、“联接”、“邻近”、“紧挨着”、“在上面”、“在上面”、“在下面”和“安置”。除非明确描述为“直接的”,否则当在上述公开中描述第一和第二元件之间的关系时,该关系可以是在第一和第二元件之间不存在其他介入元件的直接关系,但是也可以是在第一和第二元件之间存在一个或多个介入元件(在空间上抑或功能上)的间接关系。如本文所使用的,短语“A、B和C中的至少一个”应当被解释为使用非排他性逻辑“或”来意指逻辑“A或B或C”,而不应该被解释为“A中的至少一个、B中的至少一个和C中的至少一个”。
在图中,如箭头所指示的箭头方向通常表示图示感兴趣的信息流(如数据或指令)。例如,当元件A和元件B交换各种信息,但是从元件A传输到元件B的信息与图示相关时,箭头可以从元件A指向元件B。这个单向箭头并不意味着没有其他信息从元件B传输到元件A。此外,对于从元件A发送到元件B的信息,元件B可向元件A发送对该信息的请求或接收确认。
在本申请中,包括以下定义,术语“模块”或术语“控制器”可用术语“电路”代替。术语“模块”可以指以下各者、是以下各者一部分或包括以下各者:专用集成电路数字(ASIC)、模拟或混合模拟/数字离散电路;数字、模拟或混合模拟/数字集成电路;组合逻辑电路;现场可编程门阵列(FPGA);执行代码的处理器电路(共享、专用或组);存储由处理器电路执行的代码的存储器电路(共享、专用或组);提供所述功能的其他合适的硬件部件;或上述部分或全部的组合,例如在片上系统中。
该模块可包括一个或多个接口电路。在一些示例中,接口电路可以包括连接到局域网(LAN)、互联网、广域网(WAN)或其组合的有线或无线接口。本公开的任何给定模块的功能可分布在经由接口电路连接的多个模块中。例如,多个模块可允许负载平衡。在另外的示例中,服务器(也称为远程或云)模块可代表客户端模块完成一些功能。
如上所述,术语代码可包括软件、固件和/或微码,并且可指程序、例程、函数、类、数据结构和/或对象。术语共享处理器电路涵盖执行来自多个模块的部分或全部代码的单个处理器电路。术语组处理器电路涵盖与附加处理器电路相结合的处理器电路,其执行来自一个或多个模块的一些或全部代码。对多个处理器电路的引用涵盖分立管芯上的多个处理器电路、单个管芯上的多个处理器电路、单个处理器电路的多个内核、单个处理器电路的多个线程或以上的组合。术语共享存储器电路涵盖存储来自多个模块的部分或全部代码的单个存储器电路。术语组存储器电路涵盖与附加存储器相结合的存储器电路,其存储来自一个或多个模块的部分或全部代码。
术语存储器电路是术语计算机可读介质的子集。如本文使用的术语计算机可读介质不涵盖通过介质(诸如,在载波上)传播的瞬态电信号或电磁信号;因此,术语计算机可读介质可被认为是有形的和非暂时性的。非暂时性有形计算机可读介质的非限制性示例是非易失性存储器电路(诸如闪存电路、可擦除可编程只读存储器电路或屏蔽只读存储器电路)、易失性存储器电路(诸如,静态随机存取存储器电路或动态随机存取存储器电路)、磁存储介质(诸如,模拟或数字磁带或硬盘驱动器)和光存储介质(例如CD、DVD或蓝光光盘)。
本申请中描述的设备和方法可以部分或全部由专用计算机实施,该专用计算机通过配置通用计算机来执行计算机程序中包含的一个或多个特定功能而创建的。上面描述的功能块、流程图部件和其他元件用作软件规范,这些软件规范可以由熟练的技术人员或程序员的日常工作翻译成计算机程序。
计算机程序包括存储在至少一个非暂时性有形计算机可读介质上的处理器可执行指令。计算机程序还可包括或依赖于存储的数据。计算机程序可涵盖与专用计算机的硬件交互的基本输入/输出系统(BIOS)、与专用计算机的特定装置交互的装置驱动程序、一个或多个操作系统、用户应用程序、后台服务、后台应用程序等。
计算机程序可以包括:(1)要解析的描述性文本,诸如HTML(超文本标记语言)、XML(可扩展标记语言)或JSON(JavaScript Object Notification)(2)汇编代码,(3)由编译器从源代码生成的目标代码,(4)由解释器执行的源代码,(5)由实时编译器编译和执行的源代码,等等。仅作为示例,源代码可使用包括C、C++、C#、Objective-C、Swift、Haskell、Go、SQL、R、Lisp、Java®、Fortran、Perl、Pascal、Curl、OCaml、Javascript®、HTML5(超文本标记语言第五版)、Ada、ASP(活动服务器页面)、PHP(PHP:超文本预处理器)、Scala、Eiffel、Smalltalk、Erlang、Ruby、Flash®、Visual Basic®、Lua、MATLAB、SIMULINK和Python®在内的语言的语法来编写。
- 用于检测定子绕组故障和劣化的系统和方法
- 用于检测多相无刷励磁机定子励磁绕组故障的方法和系统