一种电池极耳的电阻焊接设备
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及一种电阻焊接领域,尤其涉及一种电池极耳的电阻焊接设备。
背景技术
电阻焊接是指利用电流通过焊件及接触处产生的电阻热作为热源将焊件局部加热,同时加压进行焊接的方法。焊接时,不需要填充金属,生产率高,焊件变形小,容易实现自动化;电阻焊利用电流流经工件接触面及邻近区域产生的电阻热效应将其加热到熔化或塑性状态,使之形成金属结合的一种方法。
动力锂电池在使用之前,需要在两片极耳上焊接上电线以达到远距离电力输送,但是锂电池的焊接需要严格的操作,传统的电阻焊接手段无法对锂电池的极耳做到精准稳定焊接,且在焊接的过程中会使得锡片发生掉落,造成锂电池的损伤,同时机械式的焊接手段无法利用助焊剂进行快速稳定焊接,使得电池极耳和电线之间的连接不够紧密,电线极易发生脱落。
针对上述问题,现急需一种电池极耳的电阻焊接设备。
发明内容
为了克服动力锂电池在使用之前,需要在两片极耳上焊接上电线以达到远距离电力输送,但是锂电池的焊接需要严格的操作,传统的电阻焊接手段无法对锂电池的极耳做到精准稳定焊接,且在焊接的过程中会使得锡片发生掉落,造成锂电池的损伤,同时机械式的焊接手段无法利用助焊剂进行快速稳定焊接,使得电池极耳和电线之间的连接不够紧密,电线极易发生脱落的缺点,本发明的目的是提供一种电池极耳的电阻焊接设备。
技术方案为:一种电池极耳的电阻焊接设备,包括有底座、支撑底板、控制屏、固定系统、焊丝拉扯定位系统、焊接系统和动力系统;支撑底板底部的四个对角分别设置有一组底座;支撑底板与控制屏相连接;支撑底板与固定系统相连接;支撑底板与焊接系统相连接;支撑底板与动力系统相连接;焊丝拉扯定位系统与焊接系统相连接;焊接系统与动力系统相连接。
作为更进一步的优选方案,固定系统包括有载物板、第一定位块、第二定位块、第一电动推杆、第一夹持板、第二电动推杆、第二夹持板、第一锥齿轮、第一丝杆、温度感应器、第一连接板、第一直滑轨、第二锥齿轮、第二丝杆和限位杆;载物板与第一定位块进行焊接;载物板与第二定位块进行焊接;载物板与第一电动推杆进行螺栓连接;载物板与第二电动推杆进行螺栓连接;载物板与第一丝杆进行转动连接;载物板与第一直滑轨进行固接;载物板与第二丝杆进行旋接;载物板与限位杆进行滑动连接;第一电动推杆与第一夹持板进行固接;第二电动推杆与第二夹持板进行固接;第一锥齿轮与第一丝杆进行固接;第一丝杆与第一连接板进行旋接;温度感应器与第一连接板进行固接;第一连接板与第一直滑轨进行滑动连接;第一直滑轨对称设置有两组;第二锥齿轮与第二丝杆进行固接;第二丝杆通过支架与支撑底板进行转动连接;限位杆通过支架与支撑底板进行固接。
作为更进一步的优选方案,焊丝拉扯定位系统包括有焊丝缠绕辊、支撑架、空心架、第一固定板、第一电动滑轨、第一滑块、第一橡胶块、电动转轴、第一连杆、弧形滑轨、第三连接块和第二橡胶块;焊丝缠绕辊与支撑架进行转动连接;支撑架与空心架进行固接;支撑架与焊接系统相连接;空心架侧面设置有第一固定板;第一固定板与第一电动滑轨进行螺栓连接;第一固定板与焊接系统相连接;第一电动滑轨与第一滑块进行滑动连接;第一滑块与第一橡胶块进行固接;第一滑块与电动转轴进行转动连接;第一滑块与弧形滑轨进行固接;电动转轴与第一连杆进行固接;第一连杆通过连接套与弧形滑轨进行滑动连接;第一连杆与第三连接块进行转动连接;第三连接块与第二橡胶块进行固接。
作为更进一步的优选方案,焊接系统包括有龙门架、第一传动轮、第二传动轮、传动杆、套杆、第三锥齿轮、第一支撑板、第三电动推杆、第四锥齿轮、第二连接板、第二连杆、第二固定板、第二直滑轨、液压杆、小型焊接头、储液罐、第一输液管、电动阀门、第二输液管、第二电动滑轨、第二滑块、第四电动推杆和夹板;龙门架通过短转轴与第一传动轮进行转动连接;龙门架与传动杆进行转动连接;龙门架与第三电动推杆进行螺栓连接;龙门架与第二连接板进行转动连接;龙门架与第二直滑轨进行固接进行螺栓连接;龙门架与储液罐进行固接;龙门架与第一输液管进行套接;龙门架与第二输液管进行套接;龙门架与第二电动滑轨进行螺栓连接;龙门架与支撑底板进行固接;龙门架与支撑架进行固接;龙门架与第一固定板进行固接;第一传动轮外环面通过皮带与第二传动轮进行传动连接;第一传动轮与动力系统相连接;第二传动轮与传动杆进行固接;传动杆与套杆相连接;套杆与第三锥齿轮进行固接;套杆与第一支撑板进行转动连接;第一支撑板与第三电动推杆进行固接;第三锥齿轮侧面设置有第四锥齿轮;第四锥齿轮与第二连接板进行固接;第二连接板与第二连杆进行转动连接;第二连杆与第二固定板进行转动连接;第二固定板与第二直滑轨进行滑动连接;第二固定板与液压杆进行螺栓连接;液压杆与小型焊接头进行固接;储液罐与第一输液管进行螺纹连接;第一输液管与电动阀门进行固接;电动阀门与第二输液管进行固接;第二电动滑轨与第二滑块进行滑动连接;第二滑块与第四电动推杆进行螺栓连接;第四电动推杆与夹板进行固接。
作为更进一步的优选方案,动力系统包括有电机、输出轴、第五锥齿轮、轴套、第三传动轮、第六锥齿轮、第二支撑板和第五电动推杆;电机与输出轴进行固接;电机与支撑底板进行螺栓连接;输出轴依次与第五锥齿轮和第三传动轮进行固接;输出轴与轴套相连接;输出轴通过支架与支撑底板进行转动连接;轴套与第六锥齿轮进行固接;轴套与第二支撑板进行转动连接;第三传动轮外环面通过皮带与第一传动轮进行传动连接;第二支撑板与第五电动推杆进行固接;第五电动推杆与支撑底板进行螺栓连接。
作为更进一步的优选方案,第二输液管的一侧为锥状,且一侧端部设置有矩形槽和球头挡块。
作为更进一步的优选方案,第二滑块一侧的外接板的下端面设置有海绵,夹板的上端面设置有海绵。
作为更进一步的优选方案,输出轴靠近第三传动轮处设置有一段六棱形的轴杆。
本发明具有以下优点:本发明设计了固定系统,将动力锂电池进行承接并两侧夹紧,随后在锂电池的一侧紧贴温度感应器,实时监测锂电池在极耳焊接过程中的温度变化,最后实现锂电池的输送定位至焊接位置;
本发明设计了焊丝拉扯定位系统,不断的拉扯焊丝进入极耳和小型焊接头之间,实现焊丝的供应;
本发明设计了焊接系统,利用小型焊接头率先熔断小结焊丝,随后对锂电池的极耳预热,在焊丝融化的程度足够时,滴入两滴助焊剂随后再实现电线与极耳的电阻焊接;
本发明设计了动力系统,在各系统需要动力时则运行提供动力的输送;
本发明利用电阻焊接的方式对锂电池的极耳进行电线的焊接,做到传统焊接手段无法达到的精准稳定焊接,利用助焊剂提高焊接的速度,同时在焊接的过程中对锂电池的温度进行实时监测,避免焊接的过程锂电池温度过高而发生爆炸;对焊丝的融化进行严格定位把控,减少焊丝融化后液体的无规则流动,提高电线的焊接面积使得电池极耳和电线之间的连接紧密,避免焊接的过程中会使得锡片发生掉落。
附图说明
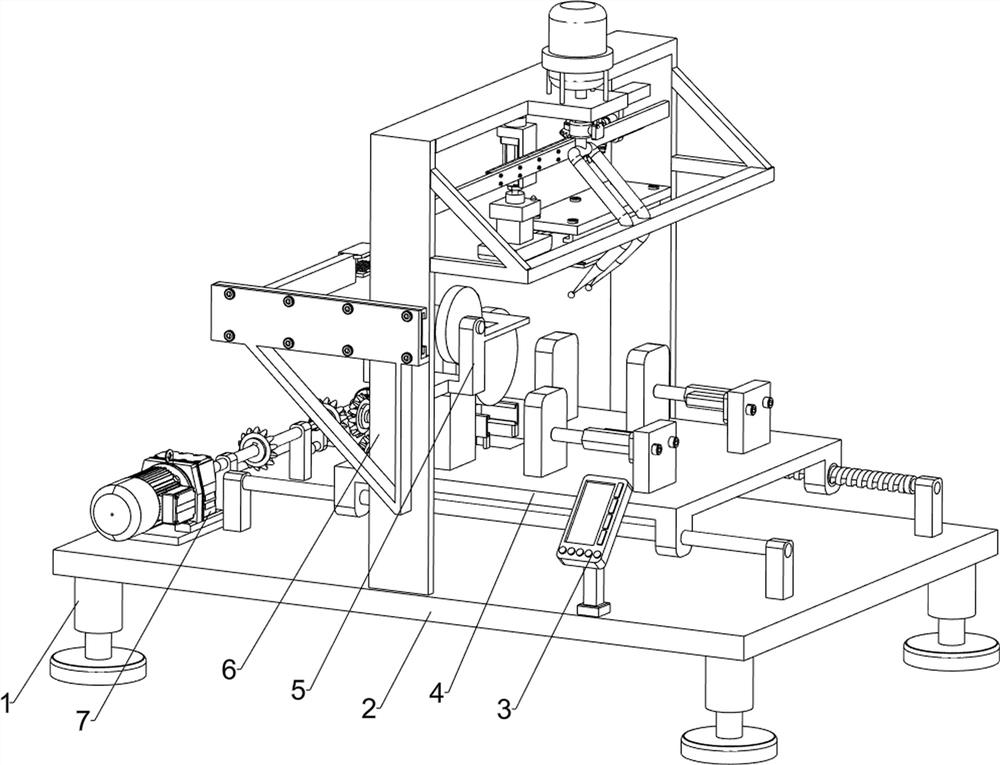
图1为本发明的第一种立体结构示意图;
图2为本发明的第二种立体结构示意图;
图3为本发明固定系统的第一种立体结构示意图;
图4为本发明固定系统的第二种立体结构示意图;
图5为本发明焊丝拉扯定位系统的立体结构示意图;
图6为本发明G处的放大结构示意图;
图7为本发明焊接系统的第一种立体结构示意图;
图8为本发明焊接系统的第二种立体结构示意图;
图9为本发明焊接系统的第三种立体结构示意图;
图10为本发明F处的放大结构示意图;
图11为本发明动力系统的立体结构示意图。
图中标号名称:1-底座,2-支撑底板,3-控制屏,4-固定系统,5-焊丝拉扯定位系统,6-焊接系统,7-动力系统,401-载物板,402-第一定位块,403-第二定位块,404-第一电动推杆,405-第一夹持板,406-第二电动推杆,407-第二夹持板,408-第一锥齿轮,409-第一丝杆,4010-温度感应器,4011-第一连接板,4012-第一直滑轨,4013-第二锥齿轮,4014-第二丝杆,4015-限位杆,501-焊丝缠绕辊,502-支撑架,503-空心架,504-第一固定板,505-第一电动滑轨,506-第一滑块,507-第一橡胶块,508-电动转轴,509-第一连杆,5010-弧形滑轨,5011-第三连接块,5012-第二橡胶块,601-龙门架,602-第一传动轮,603-第二传动轮,604-传动杆,605-套杆,606-第三锥齿轮,607-第一支撑板,608-第三电动推杆,609-第四锥齿轮,6010-第二连接板,6011-第二连杆,6012-第二固定板,6013-第二直滑轨,6014-液压杆,6015-小型焊接头,6016-储液罐,6017-第一输液管,6018-电动阀门,6019-第二输液管,6020-第二电动滑轨,6021-第二滑块,6022-第四电动推杆,6023-夹板,701-电机,702-输出轴,703-第五锥齿轮,704-轴套,705-第三传动轮,706-第六锥齿轮,707-第二支撑板,708-第五电动推杆。
具体实施方式
下面结合具体实施例对技术方案做进一步的说明,需要注意的是:本文中所说的上、下、左、右等指示方位的字词仅是针对所示结构在对应附图中位置而言。本文中为零部件所编序号本身,例如:第一、第二等,仅用于区分所描述的对象,不具有任何顺序或技术含义。而本申请所说如:连接、联接,如无特别说明,均包括直接和间接连接(联接)。
实施例1
一种电池极耳的电阻焊接设备,如图1-11所示,包括有底座1、支撑底板2、控制屏3、固定系统4、焊丝拉扯定位系统5、焊接系统6和动力系统7;支撑底板2底部的四个对角分别设置有一组底座1;支撑底板2与控制屏3相连接;支撑底板2与固定系统4相连接;支撑底板2与焊接系统6相连接;支撑底板2与动力系统7相连接;焊丝拉扯定位系统5与焊接系统6相连接;焊接系统6与动力系统7相连接。
装置在运行之前,将装置放置在平稳的工作地点,调节底座1的伸缩高度,使得支撑底板2处于一个水平的状态,外接电源,操作者手动操作控制屏3启动装置,查看各系统之间的运行传动情况,确认不发生运行问题之后关闭装置;外接锂电池输送装置,再次操作控制屏3启动装置,固定系统4将动力锂电池进行承接并两侧夹紧,随后在锂电池的一侧紧贴温度感应器4010,实时监测锂电池在极耳焊接过程中的温度变化,最后实现锂电池的输送定位至焊接位置;锂电池定位至焊丝拉扯定位系统5一侧时,焊丝拉扯定位系统5开始运行,不断的拉扯焊丝进入极耳和小型焊接头6015之间,实现焊丝的供应;随后焊接系统6开始运行,利用小型焊接头6015率先熔断小结焊丝,随后对锂电池的极耳预热,在焊丝融化的程度足够时,滴入两滴助焊剂随后再实现电线与极耳的电阻焊接;动力系统7在各系统需要动力时则运行提供动力的输送;本发明利用电阻焊接的方式对锂电池的极耳进行电线的焊接,做到传统焊接手段无法达到的精准稳定焊接,利用助焊剂提高焊接的速度,同时在焊接的过程中对锂电池的温度进行实时监测,避免焊接的过程锂电池温度过高而发生爆炸;对焊丝的融化进行严格定位把控,减少焊丝融化后液体的无规则流动,提高电线的焊接面积使得电池极耳和电线之间的连接紧密,避免焊接的过程中会使得锡片发生掉落。
固定系统4包括有载物板401、第一定位块402、第二定位块403、第一电动推杆404、第一夹持板405、第二电动推杆406、第二夹持板407、第一锥齿轮408、第一丝杆409、温度感应器4010、第一连接板4011、第一直滑轨4012、第二锥齿轮4013、第二丝杆4014和限位杆4015;载物板401与第一定位块402进行焊接;载物板401与第二定位块403进行焊接;载物板401与第一电动推杆404进行螺栓连接;载物板401与第二电动推杆406进行螺栓连接;载物板401与第一丝杆409进行转动连接;载物板401与第一直滑轨4012进行固接;载物板401与第二丝杆4014进行旋接;载物板401与限位杆4015进行滑动连接;第一电动推杆404与第一夹持板405进行固接;第二电动推杆406与第二夹持板407进行固接;第一锥齿轮408与第一丝杆409进行固接;第一丝杆409与第一连接板4011进行旋接;温度感应器4010与第一连接板4011进行固接;第一连接板4011与第一直滑轨4012进行滑动连接;第一直滑轨4012对称设置有两组;第二锥齿轮4013与第二丝杆4014进行固接;第二丝杆4014通过支架与支撑底板2进行转动连接;限位杆4015通过支架与支撑底板2进行固接。
外接的动力锂电池输送装置将锂电池放在载物板401上,此时锂电池的一侧分别与第一定位块402和第二定位块403相接触,随后第一电动推杆404运行带动第一夹持板405移动,对锂电池的另一侧进行夹紧,与此同时第二电动推杆406带动第二夹持板407移动至与锂电池的另一侧相贴紧,因此锂电池处于一个被固定的状态,由于第一锥齿轮408在锂电池上料的过程中是与第五锥齿轮703相啮合的,因此电机701运行带动第五锥齿轮703转动,第五锥齿轮703传动第一锥齿轮408带动第一丝杆409转动,第一丝杆409带动第一连接板4011在两组第一直滑轨4012上移动,温度感应器4010在跟随移动的过程中接触锂电池的一侧,实现锂电池的温度的精准监测,随后动力系统7中的第六锥齿轮706在移动的过程中啮合第二锥齿轮4013,第二锥齿轮4013在获得动力之后带动第二丝杆4014转动,第二丝杆4014带动载物板401在限位杆4015上滑动,并将锂电池的极耳定位至需进行焊接的位置;本系统将动力锂电池进行承接并两侧夹紧,随后在锂电池的一侧紧贴温度感应器4010,实时监测锂电池在极耳焊接过程中的温度变化,最后实现锂电池的输送定位至焊接位置。
焊丝拉扯定位系统5包括有焊丝缠绕辊501、支撑架502、空心架503、第一固定板504、第一电动滑轨505、第一滑块506、第一橡胶块507、电动转轴508、第一连杆509、弧形滑轨5010、第三连接块5011和第二橡胶块5012;焊丝缠绕辊501与支撑架502进行转动连接;支撑架502与空心架503进行固接;支撑架502与焊接系统6相连接;空心架503侧面设置有第一固定板504;第一固定板504与第一电动滑轨505进行螺栓连接;第一固定板504与焊接系统6相连接;第一电动滑轨505与第一滑块506进行滑动连接;第一滑块506与第一橡胶块507进行固接;第一滑块506与电动转轴508进行转动连接;第一滑块506与弧形滑轨5010进行固接;电动转轴508与第一连杆509进行固接;第一连杆509通过连接套与弧形滑轨5010进行滑动连接;第一连杆509与第三连接块5011进行转动连接;第三连接块5011与第二橡胶块5012进行固接。
当锂电池处于焊丝缠绕辊501的一侧时,与第一固定板504相连接的第一电动滑轨505开始运行带动第一滑块506移动,第一滑块506在移动的过程中使得第一橡胶块507接触到空心架503所制成的焊丝,随后电动转轴508运行带动第一连杆509转动,第一连杆509在弧形滑轨5010上滑动并带动第三连接块5011移动,第二橡胶块5012在跟随移动的过程中和第一橡胶块507进行配合,实现对焊丝的夹紧,随后第一电动滑轨505带动第一滑块506回程,焊丝在拉扯的过程中带动焊丝缠绕辊501在支撑架502上转动,实现焊丝的供给,随后当焊丝的一端与小型焊接头6015靠近第三锥齿轮606这一侧相平齐时,电动转轴508反向转动,并将焊丝进行释放,因此实现焊丝的定位,以备后续的熔融。
焊接系统6包括有龙门架601、第一传动轮602、第二传动轮603、传动杆604、套杆605、第三锥齿轮606、第一支撑板607、第三电动推杆608、第四锥齿轮609、第二连接板6010、第二连杆6011、第二固定板6012、第二直滑轨6013、液压杆6014、小型焊接头6015、储液罐6016、第一输液管6017、电动阀门6018、第二输液管6019、第二电动滑轨6020、第二滑块6021、第四电动推杆6022和夹板6023;龙门架601通过短转轴与第一传动轮602进行转动连接;龙门架601与传动杆604进行转动连接;龙门架601与第三电动推杆608进行螺栓连接;龙门架601与第二连接板6010进行转动连接;龙门架601与第二直滑轨6013进行固接进行螺栓连接;龙门架601与储液罐6016进行固接;龙门架601与第一输液管6017进行套接;龙门架601与第二输液管6019进行套接;龙门架601与第二电动滑轨6020进行螺栓连接;龙门架601与支撑底板2进行固接;龙门架601与支撑架502进行固接;龙门架601与第一固定板504进行固接;第一传动轮602外环面通过皮带与第二传动轮603进行传动连接;第一传动轮602与动力系统7相连接;第二传动轮603与传动杆604进行固接;传动杆604与套杆605相连接;套杆605与第三锥齿轮606进行固接;套杆605与第一支撑板607进行转动连接;第一支撑板607与第三电动推杆608进行固接;第三锥齿轮606侧面设置有第四锥齿轮609;第四锥齿轮609与第二连接板6010进行固接;第二连接板6010与第二连杆6011进行转动连接;第二连杆6011与第二固定板6012进行转动连接;第二固定板6012与第二直滑轨6013进行滑动连接;第二固定板6012与液压杆6014进行螺栓连接;液压杆6014与小型焊接头6015进行固接;储液罐6016与第一输液管6017进行螺纹连接;第一输液管6017与电动阀门6018进行固接;电动阀门6018与第二输液管6019进行固接;第二电动滑轨6020与第二滑块6021进行滑动连接;第二滑块6021与第四电动推杆6022进行螺栓连接;第四电动推杆6022与夹板6023进行固接。
当焊丝准备完毕之后,液压杆6014运行带动小型焊接头6015移动至接触焊丝,随后小型焊接头6015将焊丝融化,液压杆6014带动小型焊接头6015移动至与锂电池极耳最上端不相接触也不提供压力,随后第三电动推杆608运行带动第一支撑板607移动,套杆605在跟随移动的过程中带动第三锥齿轮606啮合第四锥齿轮609,由于第一传动轮602从第三传动轮705处获得动力带动第二传动轮603转动,第二传动轮603带动传动杆604传动套杆605转动,套杆605带动第三锥齿轮606传动第四锥齿轮609,第四锥齿轮609带动第二连接板6010传动第二连杆6011,第二连杆6011带动第二固定板6012在第二直滑轨6013上作往复直线运动,液压杆6014和小型焊接头6015跟随做相同的运动,由于小型焊接头6015处于极耳上端,因此在往复直线运动的过程中小型焊接头6015实现对动力锂电池的极耳进行预热,完成预热之后小型焊接头6015定位至电池极耳的正上方,随后第三电动推杆608实现回程,使得第三锥齿轮606脱离啮合第四锥齿轮609,随后在焊丝拉扯定位系统5的反复运行过程中,液压杆6014同样带动小型焊接头6015间歇性的上下移动,在完成焊接液的准备之后,固定系统4带动动力锂电池定位至第二输液管6019正下方,随后电动阀门6018运行使得储液罐6016里的助焊剂从第一输液管6017中输送至第二输液管6019,同时控制助焊剂的流量,使得助焊剂从第二输液管6019中以水滴状的方式滴落两滴至电池极耳上,随后再次将电池极耳定位至小型焊接头6015正下方,此时第四电动推杆6022运行带动夹板6023移动,实现外接电线的夹持,随后第二电动滑轨6020带动第二滑块6021移动,电线在跟随移动的过程中定位至电池极耳的上端面,随后液压杆6014推动小型焊接头6015移动融化焊丝的同时提供一定的压力,使得电线与焊接液实现稳定的连接,此过程反复进行三至四次,实现电池极耳和电线的焊接;本系统利用小型焊接头6015率先熔断小结焊丝,随后对锂电池的极耳预热,在焊丝融化的程度足够时,滴入两滴助焊剂随后再实现电线与极耳的电阻焊接。
动力系统7包括有电机701、输出轴702、第五锥齿轮703、轴套704、第三传动轮705、第六锥齿轮706、第二支撑板707和第五电动推杆708;电机701与输出轴702进行固接;电机701与支撑底板2进行螺栓连接;输出轴702依次与第五锥齿轮703和第三传动轮705进行固接;输出轴702与轴套704相连接;输出轴702通过支架与支撑底板2进行转动连接;轴套704与第六锥齿轮706进行固接;轴套704与第二支撑板707进行转动连接;第三传动轮705外环面通过皮带与第一传动轮602进行传动连接;第二支撑板707与第五电动推杆708进行固接;第五电动推杆708与支撑底板2进行螺栓连接。
当其余系统需要动力时,电机701带动输出轴702转动,输出轴702带动第五锥齿轮703和第三传动轮705转动,第五锥齿轮703传动固定系统4,实现系统与系统之间的动力输送,相应的第三传动轮705传动焊接系统6,实现系统与系统之间的动力输送,而控制锂电池的输送过程时,第五电动推杆708推动第二支撑板707移动,第二支撑板707带动轴套704在输出轴702上滑动,同时输出轴702传动轴套704带动第六锥齿轮706转动,第六锥齿轮706在啮合第二锥齿轮4013时,实现锂电池的移动并完成定位;本系统在各系统需要动力时则运行提供动力的输送。
第二输液管6019的一侧为锥状,且一侧端部设置有矩形槽和球头挡块。
有利于形成助焊剂形成水滴状,有利于更快形成焊接。
第二滑块6021一侧的外接板的下端面设置有海绵,夹板6023的上端面设置有海绵。
有利于电线的稳定夹持,使得电线在焊接的过程中不会发生移位。
输出轴702靠近第三传动轮705处设置有一段六棱形的轴杆。
有利于轴套704的滑动的同时稳定提供动力输送。
尽管已经示出和描述了本发明的实施例,但对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行变化,本发明的范围由所附权利要求及其等同物限定。
- 一种电池极耳的电阻焊接设备
- 一种电池极耳电阻焊接设备