一种用于智能制造的多源信息融合方法
文献发布时间:2023-06-19 11:32:36
技术领域
本发明属于智能制造技术领域,具体涉及一种智能制造生产过程基于组间差于与组内差异的权重分配策略的多源信息融合方法。
背景技术
智能制造是人工智能并综合应用自动化技术和制造技术的制造过程。中药、农产品、食品等均具有成分复杂、靶点多、作用途径多的特点,全面可靠的评价体系是智能制造应用的重要环节,多源信息融合协同并互补多传感器的信息,能够提高系统的可靠性。
传感器权重的确定是多源信息融合算法的关键问题,传统的权重确定方法是加权平均法,即不同传感器均赋予相同的权重因子。然而,加权平均法并没有考虑各传感器自身的性质,实际上,即使是同一类传感器在测定过程中,也可能具有不同的权重,基于样品自身性质的权重分配策略亟待建立。
本发明创造性提出基于马氏距离、欧氏距离和方差分析的权重分配方法,此外,首次引入基于组间差异与组内差异的权重分配策略,实现智能制造生产过程的多源信息融合。
发明内容
本发明的目的在于提供基于组间差异与组内差异的权重分配策略权重分配策略,建立适用于智能制造的多源信息融合方法。
为达上述目的,其中,所述方法包括:
步骤1:通过多传感器技术获取样品的信息,计算样品不同传感器信息的组间差异和组内差异;
步骤2:根据样品组间差异和组内差异比值,确定各传感器权重;
步骤3:采用多源信息融合策略,结合各传感器的分配权重,实现多源信息融合。
本发明不同传感器信息组间差异和组内差异的评价包括如下方法:
(1)样品原始数据多维空间欧氏/马氏距离评价法,包括如下步骤:
步骤1:检测每个批次样品属性,每个样品重复测定至少三次,取平均值;
步骤2:计算每个批次样品属性的最大欧氏/马氏距离,表征每个批次样品的组内差异;
步骤3:计算每个批次中心的最大欧氏/马氏距离,表征不同批次样品的组间差异;
步骤4:建立原始数据多维空间欧氏/马氏距离评价法,获得样品的组间和组内差异。
(2)样品主成分空间的欧氏/马氏距离评价法,包括如下步骤:
步骤1:检测每个批次样品属性,每个样品重复测定至少三次,取平均值;
步骤2:采用主成分分析降维,获取每种传感器的特征变量;
步骤3:计算每个批次样品特征变量的最大欧氏/马氏距离,表征每个批次样品的组内差异,
步骤4:计算每个批次特征变量中心的最大欧氏/马氏距离,表征不同批次样品的组间差异;
步骤5:建立主成分分析空间欧氏/马氏距离评价法,获得样品的组间和组内差异。
(3)样品多元方差分析评价法,包括如下步骤:
步骤1:检测每个批次样品属性,每个样品重复测定至少三次,取平均值;
步骤2:采用主成分分析降维,获取每种传感器的特征变量;
步骤3:计算每个批次样品的组内方差和组间方差;
步骤4:建立多元方差分析评价法,获得样品的组间和组内差异。
本发明组间差异和组内差异比值代表传感器区分组间样品和组内样品的能力,比值越大,说明传感器的区分能力越好,传感器的权重也越大,组间差异和组内差异比值与传感器的权重成正比关系。
本发明多源信息融合包括:数据层融合、特征层融合和决策层融合。
(1)数据层融合结合权重策略的方法包括如下步骤:
步骤1:采用导数、平滑、标准正态变换SNV、多元散射校正MSC、标准化、归一化方法中的一种或几种对光谱预处理;
步骤2:获得基于光谱预处理后k个不同传感器的不同维度的信息,原始数据作为数据层融合的输入变量/采用主成分分析PCA得到的特征数据作为特征层融合的输入变量;
步骤3:标准化变换数据层/特征层融合的输入变量,获得不同传感器同一维度的数据;
步骤4:依据传感器组间差异和组内差异的比值,获得k个传感器的权重;
步骤5:建立基于权重的数据层融合输入变量的数学关系模型。
(2)决策层融合结合权重策略的方法包括如下步骤:
步骤1:采用导数、平滑、标准正态变换SNV、多元散射校正MSC、标准化、归一化方法对中的一种或几种光谱预处理;
步骤2:采用预处理后的输入变量分别建立各传感器的数学关系模型;
步骤3:依据传感器组间差异和组内差异的比值,获得k个传感器的权重;
步骤4:各传感器的数学关系模型结合其权重,表征决策层融合的结果。
本发明提供的多源信息融合的数学关系模型包括的数学关系模型适用于机器学习中所有方法。
综上所述,本发明提供了一种基于组间和组内差异的权重分配策略的的智能制造多源信息融合方法。
本发明的方法具有如下优点:
本发明采用多传感器技术获取样品的多维信息,计算样品不同传感器信息的组间差异和组内差异,根据样品组间差异和组内差异比值,确定各传感器权重,采用信息融合策略,结合各传感器权重的分配策略,实现多源信息融合。所建检测方法专属性强,检测结果准确、稳定。
本发明创造性提出基于马氏距离、欧氏距离和方差分析的权重分配方法,此外,首次引入特征空间组间差异与组内差异的权重分配方法,实现智能制造生产过程的多源信息融合。
附图说明
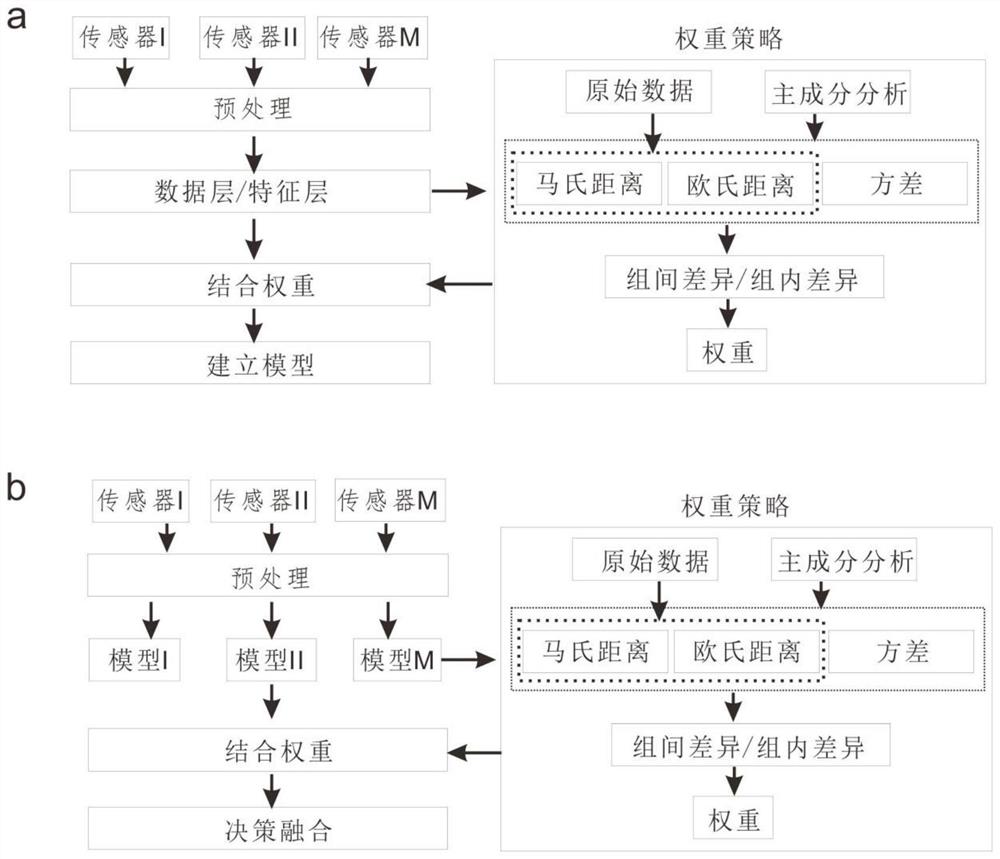
图1多源信息融合方法流程图;(a)数据层/特征层融合,(b)决策融合
图2(a)牛黄粉末Vis光谱图,(b)SNV预处理Vis光谱,(c)牛黄粉末NIR 光谱图,(d)SNV预处理NIR光谱,(e)牛黄粉末色度值图;
图3基于Vis,NIR和色值方法的多元统计过程控制MSPC模型;(a)Vis方法Hotelling T
图4基于NIR和MIR数据层融合的多元统计过程控制MSPC模型;(a)Hotelling T
具体实施方式
下面结合附图和实施实例做进一步说明,但本发明不限于此。
实施例1:一种智能制造决策层融合方法在贵细药质量评价中的应用
(1)牛黄粉末多源信息采集
贵细药牛黄粉末决策层融合方法示意图如图1所示。采集30批次的牛黄粉末的可见光谱Vis,近红外光谱NIR和色度值三个维度的信息,具体如下:采用可见-近红外光谱仪采集90个样品的可见光谱,光谱范围为400~800nm,分辨率0.5nm,扫描32次,每个样品采集4个区域,求均值;采用近红外光谱仪采集90个样品的NIR光谱,光谱范围为1100~2400nm,分辨率0.5nm,扫描32 次,每个样品采集4个区域,求均值;采用电子眼测定90个样品的色度值,光源为D65,视角为10°,每个样品采集3个区域,求均值。
图2.a为牛黄粉末的Vis原始光谱图,图2.b为牛黄粉末经过SNV预处理后的光谱,SNV具有消除固体颗粒表面散射和光程变换的作用。图2.c为牛黄粉末的NIR 原始光谱图,样品NIR光谱主要特征谱带的归属如下:2300nm,2100nm和1900 nm附近的吸收带分别为C-H,N-H和O-H伸缩振动的组合频吸收;1700nm,1500 nm和1480nm附近的吸收带分别为C-H,N-H和O-H伸缩振动的一倍频吸收;1200 nm附近的吸收是C-H伸缩振动的二倍频吸收。图2.d为同仁牛黄清心丸NIR光谱经过SNV预处理后的光谱图。图2.e为牛黄粉末样品的色度值,其中L,a和b是该样品在色空间的坐标,L代表黑白,a代表红绿色,b代表黄蓝色。由图2.e可得,不同批次样品的色度值基本一致。
(2)基于Vis,NIR和色度值的多元统计过程控制MSPC模型的建立
决策融合依据每种传感器自身数据建立模型,结合权重分配策略,实现在决策中心的融合。基于贵细药牛黄粉末质量评价采用MSPC方法,建立基于Vis, NIR和色度值数据这三个传感器的数学关系模型。牛黄粉末基于Vis,NIR和电子眼传感器自身建立的模型最优主成分数均为2,Vis光谱前两个主成分的光谱解释率分别为92.51%和4.93%;NIR光谱前两个主成分的解释率分别为90.43%和6.03%;色度值前两个主成分的解释率分别为77.90%和21.07%。图3为牛黄粉末Vis,NIR和色度值的基于主成分分析的MSPC模型,其中Hotelling T
牛黄粉末Vis光谱经过SNV预处理后,建立MSPC模型。图3.a-3.b为MSPC 模型Hotelling T
(3)基于决策层融合方法的权重策略
不同传感器在数据融合中所发挥的作用依赖于其自身传感器的性能,采用多元方差分析评价法,利用组间方差与组内方差的比值α计算各传感器的权重。 Vis,NIR和色度值的主成分数均选择2。表1是不用传感器基于α的权重,通过多元方差分析,Vis光谱的α为184.5177,Vis传感器的α居中,其对应的权重为0.2816;NIR光谱的α为460.1062,NIR传感器的α值最大,对应的权重也最大为0.7020;与Vis和NIR方法相比,色度值的α最小为10.7412,电子眼传感器的权重最低为0.0164。综上说述,NIR传感器的权重较大,一方面可能是由于NIR传感器相对于Vis和电子眼传感器含有丰富的特征吸收,另一方面可能是由于NIR传感器的信噪比较高,能较为明显的区分组间样品和组内样品。
表1不同方法的权重
(4)决策融合方法结合权重策略的牛黄粉末质量评价
牛黄粉末基于Vis传感器建立的MSPC数学关系模型判别出3个异常样品,分别为88,89和90号样品。Vis传感器的的权重为0.2816,即上述3个样品作为异常样品得到0.2816的投票;牛黄粉末基于NIR传感器的建立的MSPC模型判别出4个异常样品,分别为82,88,89和90号样品。NIR传感器的的权重为 0.7020,即上述4个样品作为异常样品得到0.7020的投票;牛黄粉末基于电子眼传感器的建立的MSPC模型判别出8个异常样品(表2),然而这8个异常样品基于色度值的权重仅为0.0164,该传感器数据融合中没有发挥关键性作用,对于牛黄粉末的质量评价,色度值这一参数可以忽略。根据Vis和NIR传感器各自的结果,以及其对应的权重,可以得出基于决策融合策略异常样品共4个分别是 82,88,89和90号样品。
表2决策融合的结果
综上所述,Vis传感器和NIR传感器均采用SNV预处理方式,电子眼传器未经过预处理,三种传感器均采用2个主成分数,分别建立基于Vis,NIR传和电子眼传感器的MSPC模型。进一步,通过多元方差分析组间方差和与组内方差的比值α,确定各传感器的权重。电子眼传感器由于权重太低,在牛黄粉末的质量评价的数据融合中没有发挥关键性作用,不同传感器信息优势互补,依靠 Vis传感器和NIR传感器的信息融合,得到准确可靠的质量评价结果。
实施例2:一种智能制造数据层融合方法在大蜜丸质量评价中的应用
大蜜丸数据层融合方法示意图如图1所示。采集30批次的牛黄清心丸的近红外NIR光谱和中红外MIR光谱两个维度的信息。NIR光谱的测量范围为 1100~2400nm,分辨率0.5nm,原始光谱数据由2601个数据点组成;MIR光谱的测量范围为600~4000nm,分辨率2nm,原始光谱数据由1701个数据点组成。每个样品测定四次,计算平均值。
基于原始多维空间欧式距离评价法计算组间与组内差异,采用数据层融合的方法评价牛黄清心丸的质量。NIR光谱和MIR光谱均采用SNV预处理,获得这两个传感器预处理后的光谱信息。首先分别计算基于NIR和MIR光谱的每个批次样品的欧氏距离,确定NIR光谱组内最大欧氏距离为2.2423,MIR光谱组内最大欧氏距离为0.9477。进一步计算每个批次中心的欧氏距离,确定NIR光谱组间最大欧氏距离为3.7554,MIR光谱组间最大欧氏距离为0.9477。最终得到 NIR和MIR传感器组间差异和组内差异的比值分别为1.6748和2.1587,获得这两个传感器的权重为0.4369和0.5631。
采用基于权重的数据层融合的方法评价牛黄清心丸的质量,首先两个传感器的数据分别归一化,以获得同一维度的数据,进一步与权重结合,得到基于权重的数据层融合的输入变量,建立30批仁同仁牛黄清心丸的MSPC数学关系模型,结果如图4所示。结果表明通过基于权重的数据融合策略,其中16,18,27, 28,41和66这6个样品质量有较大波动,采用多源信息融合策略,多传感器共同作用,实现中药大蜜丸的质量控制。
- 一种用于智能制造的多源信息融合方法
- 一种用于抑制海上多路径的GNSS多源信息融合导航方法