一种精确控制风冷器出酒温度的方法
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及一种精确控制风冷器出酒温度的方法。
背景技术
酿酒用变频风冷冷凝器(简称“风冷器”)的冷凝原理是利用风机的负压气流流经冷凝管表面,使得冷凝管内的酒蒸汽在内外冷热对流的间壁效应下冷凝成酒液。传统的变频风冷器流酒温度控制一般是在出酒口处安装温度传感器,温度传感器采集出酒温度并将温度反馈给温控元件,通过PID调节控制变频器的运行频率,进一步控制风机的转速,从而调节流经冷凝管表面的风量以实现出酒温度的控制。
但在实际应用中,由于在烤酒过程中,酒蒸汽的汽量、温度、汽压受烤酒所用蒸汽管网的压力波动而波动。致使在冷凝管内酒蒸汽的气相至液相的转变位置点不断变化。出酒口处安装的温度传感器无法及时捕捉其内部温度及相变位置的变化,直接影响对出酒温度的稳定控制,并且使得酒蒸汽转化为酒液的效率降低和温度的波动,达不到工艺的需求。
发明内容
本发明公开一种精确控制风冷器出酒温度的方法,其采用的技术方案为:
一种精确控制风冷器出酒温度的方法,包括立式风冷器和控制单元,在立式风冷器的集酒盘连通的出酒管上安装第一温度传感器采集出酒温度,在立式风冷器的立式冷凝管内部插入第二温度传感器采集冷凝管内温度,根据反馈给控制单元的出酒温度值采用PID控制模式来调整立式风冷器中变频风机的转速;根据反馈给控制单元的冷凝管温度值来决定是否启用干预模式,启用干预模式时,PID控制模式被中断,干预模式由控制单元直接调整变频风机的转速大小,退出干预模式后,PID控制模式自动恢复运行。
进一步,所述控制单元内预设有出酒温度阀值、干预温度阀值、冷凝管温度阀值以及上述阀值所对应的动作判断条件,出酒温度阀值用于PID控制模式的判断,干预温度阀值和冷凝管温度阀值用于启用干预模式的判断;第一温度传感器将出酒温度反馈给控制单元,若所反馈的出酒温度与干预温度阀值比较后不满足干预模式启用条件,则进入PID控制模式;若第一温度传感器反馈的出酒温度与干预温度阀值比较后满足干预模式启用条件,且同时有第二温度传感器反馈的冷凝管温度与冷凝管温度阀值比较后也满足相应的干预模式启用条件,则PID控制模式被中断,进入干预模式。
进一步,所述第二温度传感器的探头插入到预先确定好的冷凝管内理论汽液转换点的位置处,并将理论汽液转换点位置处的温度作为冷凝管温度阀值。
进一步,所述第一温度传感器反馈的出酒温度大于或等于干预温度阀值,干预温度阀值大于出酒温度阀值,且满足第二温度传感器反馈的冷凝管温度大于冷凝管温度阀值时,PID控制模式被中断,控制单元驱动变频风机增大转速;所述第一温度传感器反馈的出酒温度小于干预温度阀值,干预温度阀值小于出酒温度阀值,且满足第二温度传感器反馈的冷凝管温度小于冷凝管温度阀值时,PID控制模式被中断,控制单元驱动变频风机降低转速。
本发明在原PID控制模式来控制出酒温度的基础上,增加了对冷凝管内温度的监控及温度预测,当仅靠PID控制方式无法很好的控制出酒温度时,则由控制单元进行干预切断原PID控制,可以直接对变频风机转速进行调节,从而可以更精确的控制出酒温度,提高出酒品质及出酒率。
附图说明
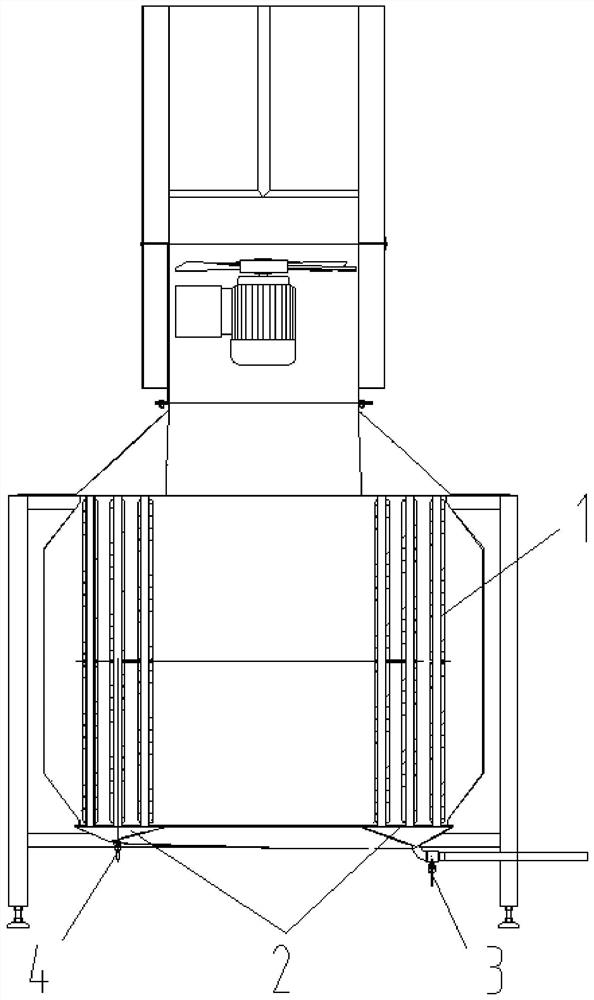
图1为采用本发明控温方法的风冷器结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
本实施例公开一种精确控制风冷器出酒温度的方法,包括如图1所示的立式风冷器以及控制单元。该风冷器外部结构与现有立式风冷器结构无太大差异,本实施例对现有立式风冷器的公知结构不做过多介绍,仅对有关出酒温度控制的部分进行说明。常规的立式风冷器如图1所示,主要包括多组立式冷凝管1、设置在冷凝管1底部的集酒盘2、变频风机以及用于数据处理和控制变频风机的控制单元。集酒盘2的底部连通出酒管,经过冷凝后酒蒸汽变成液态流入集酒盘2内,由出酒管流出。常规的温度监测是在出酒管上安装第一温度传感器3,第一温度传感器3采集出酒温度,并将出酒温度采样值反馈给控制单元,由控制单元以PID方式控制变频风机转速。
上述温度控制模式是目前的立式风冷器普遍采用的控制方式,受环境温度差异影响,实际上出酒温度变化很大,加上甑筒里加热的蒸汽波动,造就了供给风冷器酒糟汽流量和压力的波动,单纯依靠PID控制是无法精确的控制好出酒温度的,这就是现实酿酒工艺中出酒率和出酒温度波动很大的原因之一。我们知道,酒蒸汽在冷凝管1内部进行热交换时存在一个理论的汽液转换点,这个汽液转换点是随环境温度、甑筒来的酒糟汽量波动而上下位移偏离的。在原PID控制中,若风机转速过高,将产生过度冷却,导致出酒温度偏低,此时冷凝管里的相变位置将向上偏移,这个汽液转换点就偏离了原理论位置;相反,当风机转速过低,冷却不足,出酒温度偏高,冷凝管里的相变位置向下偏移。
为了能够有效弥补现有单纯依靠PID控制出酒温度的不足,本实施例在原PID控制模式的基础上,增加了对冷凝管内部温度的监测,通过监测的冷凝管实际温度来判断实际汽液转换点的位置偏移情况,设定启用干预模式的条件,通过干预模式与PID控制模式之间的切换来达到精确控制出酒温度的目的。具体如下:除了在常规出酒管上安装第一温度传感器3外,还选择其中一支冷凝管,并在位于中部的冷凝管1内插入第二温度传感器4,通过第二温度传感器4采集冷凝管1内的实际温度。安装第二温度传感器4时,需预先确定好冷凝管1内理论汽液转换点的位置以及该位置对应的理论温度值,关于汽液转换点的计算属于本领域技术人员公知的常识,此处不进行计算说明。本实施例将第二温度传感器4的探头恰好设置在确定好的理论汽液转换点位置上,并将理论汽液转换点位置对应的理论温度值作为是否启用干预模式的判断阀值。通常情况下由PID控制模式来控制出酒温度,干预模式不启用,当所设定的干预模式启用条件符合要求后,PID控制模式则被切断,进入干预模式,则由控制单元直接调整变频风机的转速大小,退出干预模式后,PID控制模式自动恢复运行。
控制单元内预设有出酒温度阀值、干预温度阀值、冷凝管温度阀值以及上述阀值所对应的动作判断条件,出酒温度阀值用于PID控制模式的判断,干预温度阀值和冷凝管温度阀值用于启用干预模式的判断;第一温度传感器将出酒温度反馈给控制单元,若所反馈的出酒温度与干预温度阀值比较后不满足干预模式启用条件,则进入PID控制模式;若第一温度传感器反馈的出酒温度与干预温度阀值比较后满足干预模式启用条件,且同时有第二温度传感器反馈的冷凝管温度与冷凝管温度阀值比较后也满足相应的干预模式启用条件,则PID控制模式被中断,进入干预模式。
举例来说:正常情况下第二温度传感器4只起到冷凝管1内温度监测的作用,整个出酒温度依然由第一温度传感器3进行出酒温度采集,通过与出酒温度阀值比较采用PID模式来控制,此时干预模式处于停用状态。当第一温度传感器3反馈的出酒温度大于或等于干预温度阀值,此时干预温度阀值大于出酒温度阀值,说明出酒温度偏高较大,PID控制已然不够理想,且此时同步满足第二温度传感器4反馈的冷凝管温度大于冷凝管温度阀值时(说明实际汽液转换点向下偏移),PID控制模式被中断,进入干预模式,由控制单元驱动变频风机增大转速。当第一温度传感器3反馈的出酒温度小于干预温度阀值,此时干预温度阀值小于相应的出酒温度阀值,说明出酒温度明显偏低,PID控制效果不佳,此时若同时满足第二温度传感器4反馈的冷凝管温度也小于冷凝管温度阀值(说明实际汽液转换点向上偏移),PID控制模式被中断,进入干预模式,由控制单元驱动变频风机降低转速。等到第二温度传感器4反馈值说明汽液转换点位置回归后,这个干预程序被切断,又重新回到PID控制模式。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种精确控制风冷器出酒温度的方法
- 一种精确控制出酒温度的风冷器