立体标记装置及骨科手术的三维实时定位方法
文献发布时间:2023-06-19 11:34:14
技术领域
本发明涉及骨科手术领域,且特别是有关于一种立体标记装置及骨科手术的三维实时定位方法。
背景技术
手术导航系统是外科手术治疗精准化和微创化的重要发展方向,光学手术导航技术是应用最广泛的一种手术导航技术。粘贴标记点有着比相对机械固定装置创伤小、操作简单,比解剖标记的精度高而被广泛采用,光学导航通过跟踪患者身上及手术工具上的标记点进行跟踪定位。在术前通过术三维医学图像确定标记点和病灶位置;术中光学手术导航通过定位系统通过跟踪患者身上的标记点,实时获取患者位姿,与术前三维医学图像注册将其转换到图像坐标系中显示。
现有手术导航还存在以下不足:首先,且在手术导航过程中会发生标记点掉落,需要重新注册;其次,标记点光线被遮挡会发生遮挡;;另外,某些手术部位不方便粘贴标记点。
中国专利申请公布号CN106214256A公开了一种无标记点光学手术导航系统及其导航方法,所述无标记点光学手术导航系统包括结构光三维扫描系统、光学定位系统、标定板和图形工作站。所述无标记点光学手术导航系统通过结构光三维扫描连续获取患者手术区域表面信息,从而获取患者表面三维坐标,通过患者实时表面三维坐标与患者术前三维医学图像注册得到坐标转换关系,同时通过所述近红外光学定位系统实时跟踪手术器械位置,最后在显示设备实时显示患者手术部位三维医学图像和手术工具。本专利文献实现患者无需标记点的光学手术导航,无需医生手工进行标记点注册,减少操作过程及手术时间,解决标记点掉落的问题,同时方便在某些手术部位不方便粘贴标记点的场合使用。
然而,所述专利文献缺乏足够的标记点,将会导致定位缺乏方向性,从而无法精准定位。
因此,便有需要提供一种应用于手术导航的骨科手术的三维实时定位方法,以解决前述的问题。
发明内容
本发明的一目的是提供一种利用立体标记装置的骨科手术的三维实时定位方法。
依据上述的目的,本发明提供一种立体标记装置,包括:一多面立方体,包括至少四个面,该至少四个面分别作为一个主标记及至少三个副标记,其中该主标记包括一主图形编码,该至少三个副标记分别包括第一副图形编码、第二副图形编码及第三副图形编码,该主图形编码用以提供一空间坐标信息,其作为计算六自由度姿态数据之用;以及一钉状体,用以固定在一手术部位上。
可选地,该主图形编码及该第一副图形编码至第三副图形编码为不同的快速响应矩阵图形编码。
可选地,该多面立方体的材料为陶瓷材料或塑料医材。
可选地,当该手术部位为脊椎时,则该钉状体为一脊突钉。
本发明还提供一种骨科手术的三维实时定位方法,包括下列步骤:提供上述至少一个立体标记装置;将该至少一个立体标记装置固定在一手术部位上;架设一光学定位系统,其包括两台六自由度摄影装置,并设定为一主摄影装置及一副摄影装置,其分别位于该手术部位的两侧;校正该主摄影装置及该副摄影装置;启动六自由度计算模块;确认该主摄影装置及该副摄影装置均可辨识到该多面立方体;判断该立体标记装置的该多面立方体是否被遮蔽,而造成该主摄影装置无法拍摄;当该多面立方体没有被遮蔽时,则以该主摄影装置进行拍摄该立体标记装置的该多面立方体;当该多面立方体有被遮蔽时,则切换以该副摄影装置进行拍摄该立体标记装置的该多面立方体;判断该立体标记装置的该多面立方体的该主标记是否被遮蔽,而造成该主摄影装置或该副摄影装置无法拍摄;当该主标记没有被遮蔽时,则该主标记的该主图形编码提供一空间坐标信息,以完成六自由度姿态数据的计算;以及当该主标记有被遮蔽时,则利用该三个副标记的该第一至第三副图形编码推算出该主标记的一空间坐标信息,以完成六自由度姿态数据的计算。
可选地,利用一转置矩阵进行影像坐标系统与世界坐标系统之间的转换,计算出六自由度姿态空间数据。
可选地,该主图形编码及该第一副图形编码至第三副图形编码为不同的快速响应矩阵图形编码。
可选地,该多面立方体的材料为陶瓷材料或塑料医材。
可选地,该陶瓷材料为氧化铝,并以一粉末压铸烧结制程、一研磨制程及一激光制程而制造完成该多面立方体。
可选地,当该手术部位为脊椎时,则该钉状体为一脊突钉。
本发明的功效如下:第一、本发明提出一种骨科手术的三维实时定位方法可为脊椎手术的三维实时定位方法,通过脊突钉结合立体标记装置计算六自由度姿态数据对脊椎节精准定位。以六自由度摄影装置拍摄立体标记装置完成标记注册后,通过脊突钉上立体标记装置不同标记的多面设置,可于六自由度摄影装置拍摄多面立方体的其中一面时,计算出该立体标记装置的位置数据。
第二、本发明的立体标记装置导入主副标记概念,当主标记被遮挡时,可通过周围副标记实时推算出主标记的空间坐标信息,以确保手术定位精准度不受医护人员或物件遮蔽影响。
第三、本发明的立体标记装置具有快速响应矩阵图形编码(QR Code)特征,可提高影像辨识度,进而提高六自由度摄影装置的取像效率。
第四、本发明通过特殊材料开发出具有快速响应矩阵图形编码(QR Code)特征的立体标记装置,单颗立体标即可定义出三维空间坐标信息。
第五、本发明的骨科手术的三维实时定位方法可应用于手术导航系统,本发明的立体标记装置不受人员或对象遮蔽而干扰其信号,进而增加医疗人员或手术房内物品的位置自由度,亦可降低医疗人员于手术房内移动的限制。
附图说明
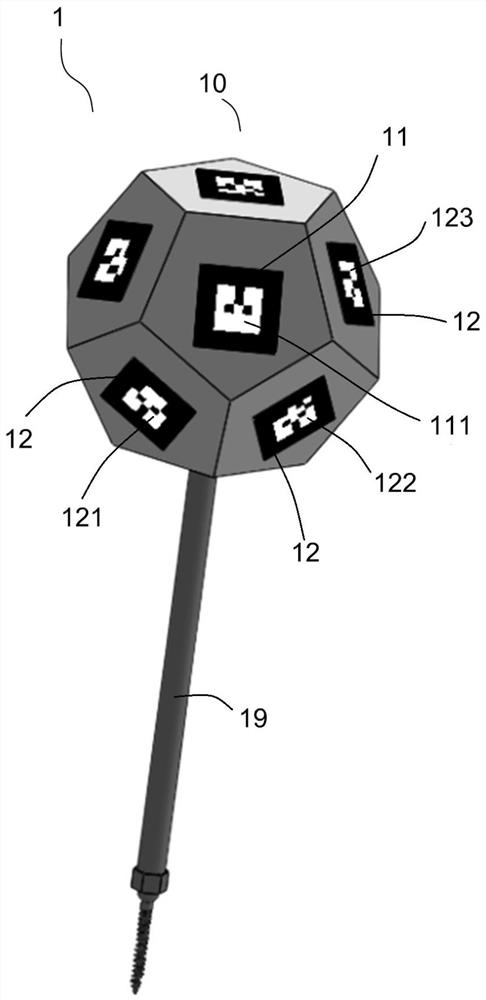
图1为本发明的一实施例的立体标记装置的立体示意图;
图2为本发明的一实施例的多个立体标记装置固定在手术部位上的立体示意图;
图3为本发明的一实施例的利用多个立体标记装置固定在手术部位的骨科手术的立体示意图;
图4为本发明的一实施例的骨科手术的三维实时定位方法的流程图。
图中:
1 立体标记装置;10 多面立方体;11 主标记;111 主图形编码;12 副标记;
121 第一副图形编码;122 第二副图形编码;123 第三副图形编码;19 钉状体;
2 手术部位;31 主摄影装置;32 副摄影装置;S10~S93 步骤。
具体实施方式
为让本发明的上述目的、特征和特点能更明显易懂,并配合图式将本发明相关实施例详细说明如下。
图1为本发明的一实施例的立体标记装置的立体示意图。图2为本发明的一实施例的多个立体标记装置固定在手术部位上的立体示意图。该立体标记装置1包括:一多面立方体10及一钉状体19。该钉状体19用以固定在一手术部位2上。当该手术部位2为脊椎时,则该钉状体19为一脊突钉。
该多面立方体10包括至少四个面,该至少四个面分别作为一个主标记11及至少三个副标记12。例如,该多面立方体10包括十二面,亦即该多面立方体10为十二面立方体。该至少三个副标记12为八个。该主标记11包括一主图形编码111,该至少三个副标记12分别包括第一副图形编码121、第二副图形编码122及第三副图形编码123,该主图形编码111用以提供一空间坐标信息,其作为计算六自由度(Degree of Freedom, DOF)姿态数据之用。例如,物体在空间具有六个自由度,即沿X、Y、Z三个直角坐标轴方向的移动自由度和绕这三个坐标轴的转动自由度。该主图形编码111及该第一至第三副图形编码121、122、123为不同的快速响应矩阵图形编码(Quick Response Code, QR Code)。
该立体标记装置1的多面立方体10的材料可为塑料医材,例如聚醚醚酮(poly-ether-ether-ketone,PEEK)。或者,该多面立方体110的材料亦可为陶瓷材料,例如氧化铝。举例,立体标记装置1的多面立方体10的粉末压铸烧结制程如下:首先,以特定氧化铝材料及粘着剂比例配方,开发符合红外线(IR)光源辨识的陶瓷块材。其次,通过钻石砂轮,将完成制作的陶瓷块材以研磨制程制作符合六自由度追踪技术所需的立体标记装置。最后,使用激光制程在六自由度氧化铝多面立方体表面加工快速响应矩阵图形编码(QR Code)特征。
图3为本发明的一实施例的骨科手术的立体示意图。图4为本发明的一实施例的骨科手术的三维实时定位方法的流程图。该骨科手术的三维实时定位方法,包括下列步骤:
在步骤S10中,提供本发明的上述至少一个立体标记装置1。请再参考图1,该立体标记装置1包括:一多面立方体10及一钉状体19。该多面立方体10包括至少四个面,该至少四个面分别作为一个主标记11及至少三个副标记12。该主标记11包括一主图形编码111,该至少三个副标记12分别包括第一副图形编码121、第二副图形编码122及第三副图形编码123。该主图形编码111及该第一至第三副图形编码121、122、123为不同的快速响应矩阵图形编码(QR Code)。
在步骤S20中,将该至少一个立体标记装置1固定在一手术部位2上。当该手术部位2为脊椎时,则多个立体标记装置1通过钉状体19(即脊突钉)固定在手术部位2上。在步骤S30中,架设一光学定位系统,其包括两台六自由度摄影装置,并设定为一主摄影装置31及一副摄影装置32,其分别位于该手术部位2的两侧。在步骤S40中,校正该主摄影装置31及该副摄影装置32。在步骤S50中,启动六自由度计算模块。该六自由度计算模块可为具有计算功能的处理器。
在步骤S55中,确认该主摄影装置31及该副摄影装置32均可辨识到该多面立方体。初次启动六自由度计算模块的软件后,需确认主副摄影装置31、32均可辨识到该立体标记装置1的多面立方体10后,才可接续进行后续流程(步骤S60~S71/S72)。若主副摄影装置31、32其中一者无法辨识到该多面立方体10,则须调整主副摄影装置31、32位置直到均可看见多面立方体。在步骤S60中,判断该立体标记装置1的该多面立方体10是否被遮蔽,而造成该主摄影装置31无法拍摄。在步骤S71中,当该立体标记装置1的该多面立方体10没有被遮蔽时,则以该主摄影装置31进行拍摄该立体标记装置1的该多面立方体10。在步骤S72中,当该立体标记装置1的该多面立方体10有被遮蔽时,则切换以该副摄影装置32进行拍摄该立体标记装置1的该多面立方体10。当该主摄影装置31或该副摄影装置32拍摄到该立体标记装置1的该多面立方体10时,则完成标记注册。
在步骤S80中,判断该立体标记装置1的该多面立方体10的该主标记11是否被遮蔽,而造成该主摄影装置31或该副摄影装置32无法拍摄。在步骤S91中,当该主标记11没有被遮蔽时,则该主标记11的该主图形编码提供一空间坐标信息,以进入步骤S93:完成六自由度姿态数据的计算。在步骤S92中,当该主标记11有被遮蔽时,则利用该三个副标记12的该第一至第三副图形编码121、122、123推算出该主标记11的一空间坐标信息,以进入步骤S93:完成六自由度姿态数据的计算。
在本实施例中,可利用一转置矩阵进行影像坐标系统与世界坐标系统(WCS)之间的转换,计算出六自由度姿态空间数据(例如,物体在空间具有六个自由度,即沿X、Y、Z三个直角坐标轴方向的移动自由度和绕这三个坐标轴的转动自由度)。举例,首先定义世界坐标系统、摄影装置坐标系统及影像坐标系统,其中世界坐标系统为共同坐标系统。然后,摄影装置所拍摄的影像数据由影像坐标系统转换到摄影装置坐标系统,再由摄影装置坐标系统转换到世界坐标系统。经过这个步骤,所有的坐标值与向量才能互相进行各种计算。传统作法,在空间中自定义出世界坐标系统的原点后,对摄影装置所处世界坐标系统中的位置,以及其内部的各项参数进行校正,才能将摄影装置所拍摄的二维影像坐标值转换到三维空间的世界坐标值,使所有的坐标系统都能互相转换。该影像坐标系统直接与该世界坐标系统之间的转换关系为转置矩阵,利用该转置矩阵即可计算出摄影装置所拍摄的物体沿X、Y、Z三个直角坐标轴方向的移动自由度和绕这三个坐标轴的转动自由度。
本发明的功效如下:第一、本发明提出一种骨科手术的三维实时定位方法可为脊椎手术的三维实时定位方法,通过脊突钉结合立体标记装置计算六自由度姿态数据对脊椎节精准定位。以六自由度摄影装置拍摄立体标记装置完成标记注册后,通过脊突钉上立体标记装置不同标记的多面设置,可于六自由度摄影装置拍摄多面立方体的其中一面时,计算出该立体标记装置的位置数据。
第二、本发明的立体标记装置导入主副标记概念,当主标记被遮挡时,可通过周围副标记实时推算出主标记的空间坐标信息,以确保手术定位精准度不受医护人员或物件遮蔽影响。
第三、本发明的立体标记装置具有快速响应矩阵图形编码(QR Code)特征,可提高影像辨识度,进而提高六自由度摄影装置的取像效率。
第四、本发明通过特殊材料开发出具有快速响应矩阵图形编码(QR Code)特征的立体标记装置,单颗立体标即可定义出三维空间坐标信息。
第五、本发明的骨科手术的三维实时定位方法可应用于手术导航系统,本发明的立体标记装置不受人员或对象遮蔽而干扰其信号,进而增加医疗人员或手术房内物品的位置自由度,亦可降低医疗人员于手术房内移动的限制。
以上所述实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。
- 立体标记装置及骨科手术的三维实时定位方法
- 三维立体多图层式无人机实时定位监管装置