一种真空环形轨道无轴承磁悬浮飞轮储能系统
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及一种真空环形轨道无轴承磁悬浮飞轮储能系统。
背景技术
随着化石能源的枯竭和环境问题的日益恶化,全球正在大力开发和利用可再生能源。可再生能源受气候条件等不可控因素的影响大,存在明显的随机性、波动性和分散性等特点,给可再生能源的大规模并网带来了前所未有的挑战。为有效的应对这一挑战,发展大规模电力储能技术的需求十分迫切。现有储能技术按原理可划分为:机械储能,电化学储能,电气储能,相变蓄热储能。
每种储能技术,各有优势和不足。综合而言,电化学储能和电气储能都具有响应快、比能量或比功率高的优势,但也都具有成本高、单体容量低的不足,难以用于大规模储能系统中;相变蓄热储能具有温度恒定和蓄热密度大的优点,但存在成本高、难规模化的不足。机械储能的储能容量大,适用于大规模储能系统中,其中抽水蓄能和压缩空气储能成本低、技术成熟,但响应慢、且受选址因素的限制。虽然飞轮储能具有响应快、效率高等优点,且不受选址因素的限制,但受轴承刚度和强度的限制,其单体容量小、能量密度低,故需要采用大规模阵列才能提高整个系统的储能容量;而大规模飞轮阵列后的成本显著增加,限制了其大范围、全方位的推广和应用。
发明内容
为了克服现有飞轮储能技术的不足,本发明提出一种真空环形轨道无轴承磁悬浮飞轮储能系统。本发明的磁悬浮飞轮储能系统不需要轴承,具有单体容量大、比功率高、成本低、稳定性强、响应快、效率较高等优势。
本发明提出一种真空环形轨道无轴承磁悬浮飞轮储能系统,整个飞轮储能系统不带轴承,采用双边型永磁同步直线电机机组分扇区供电和控制策略,实现单体飞轮的大规模储能。
其中,双边型永磁同步直线电机机组的转子和定子、轮载悬浮永磁体、轨道悬浮永磁体、轮载悬浮电磁体、轨道悬浮电磁体、轮载导向永磁体、轨道导向永磁体、轮载导向电磁体、轨道导向电磁体和飞轮转子布置在真空腔体内部,真空泵机组和变流设备布置在真空腔体外部;
真空腔体为空心圆柱体状,且空心圆柱体外侧面半径为内侧面半径的5-50倍;飞轮转子同为空心圆柱体状,与真空腔体同轴,真空腔体的尺寸减去导向气隙的宽度即为飞轮转子的尺寸;
双边型永磁同步直线电机机组的定子布置在真空腔体底部或侧面的环形轨道上,转子布置在飞轮转子的底部或侧面,双边型永磁同步直线电机机组的转子和定子在水平方向平行、垂向方向相对,两者之间的间隙为电机气隙,组成永磁同步直线电机驱动/发电系统;
悬浮永磁体包括轮载悬浮永磁体和轨道悬浮永磁体,轮载悬浮永磁体布置在飞轮转子的底部,轨道悬浮永磁体布置在真空腔体的底部环形轨道上;悬浮电磁体包括轮载悬浮电磁体和轨道悬浮电磁体,轮载悬浮电磁体布置在飞轮转子的底部,轨道悬浮电磁体布置在真空腔体的底部环形轨道上;轮载悬浮永磁体与轨道悬浮永磁体、轮载悬浮电磁体与轨道悬浮电磁体在水平方向平行、垂向方向相对,两者之间的气隙高度为悬浮高度;导向永磁体包括轮载导向永磁体和轨道导向永磁体,轮载导向永磁体布置在飞轮转子的侧面,轨道导向永磁体布置在真空腔体的侧面环形轨道上;导向电磁体包括轮载导向电磁体和轨道导向悬浮电磁体,导向悬浮电磁体布置在飞轮转子的外侧面,轨道导向电磁体布置在真空腔体的侧面环形轨道上;轮载导向永磁体与轨道导向永磁体、轮载导向电磁体与轨道导向电磁体在水平方向相对、垂向方向平行,两者之间的气隙宽度为导向宽度;
真空泵机组的抽气端布置在真空腔体内侧壁的任意位置,真空泵组位于真空腔体外侧壁的任意位置;变流设备布置在真空腔体外侧壁的任意位置,与双边型永磁同步直线电机机组定子、真空泵机组和轨道电磁体连接供电,分别驱动和制动永磁同步直线电机机组、维持真空腔体内部的真空或亚真空状态和控制轨道电磁体的电流大小。
进一步的,所述的飞轮转子不带轴承,其悬浮力由底部环形轨道上布置的悬浮永磁体和悬浮电磁体提供,导向力由侧壁环形轨道上布置的导向永磁体和导向电磁体提供。
进一步的,所述飞轮转子为一体成型的,或者分块制作再拼接固定而成。
进一步的,所述的轮载悬浮永磁体、轨道悬浮永磁体、轮载导向永磁体和轨道导向永磁体采用永磁单体或永磁Halbach阵列;
多组轮载悬浮永磁体和轨道悬浮永磁体沿底部环形轨道布置并拼接成环状;多组轮载导向永磁体和轨道导向永磁体中有部分组布置在外侧面环形轨道上,另外部分组布置在内侧面环形轨道上,每组沿外、内侧面环形轨道布置并拼接成环状;
所述多组拼成环状的轮载悬浮永磁体和轨道悬浮永磁体、多组拼成环状的轮载导向永磁体和轨道导向永磁体均分别提供主要的悬浮力和导向力。
本发明中环状永磁体的组数设计和布置位置能最大限度降低系统成本的同时,有效地提高大尺寸、大重量飞轮转子的悬浮和导向性能。
进一步的,所述的轨道悬浮电磁体和轨道导向电磁体由山字型铁芯和线圈组成,轮载悬浮电磁体和轮载导向电磁体为导磁铁板;多组轮载悬浮电磁体和轨道悬浮电磁体沿底部环形轨道布置并拼接成环状;多组轮载导向电磁体和轨道导向电磁体沿侧面环形轨道布置并拼接成环状;
多组拼成环状的轮载悬浮电磁体和轨道悬浮电磁体、多组拼成环状的轮载导向电磁体和轨道导向电磁体均分别提供辅助的悬浮力和导向力。
本发明中,环状电磁体的组数设计和布置位置能最大限度降低系统成本的同时,有效地保证大尺寸、大重量飞轮转子的悬浮和导向性能。
进一步的,所述的双边型永磁同步直线电机机组为发电和电动一体化电机,永磁同步直线电机机组的定子由铁芯和线圈组成,沿真空腔体底部的环形轨道布置;永磁同步直线电机机组的转子由永磁单体或Halbach阵列而成,沿飞轮转子底部的环形轨道布置;或者,电机机组的定子同时布置在真空腔体内底部、顶部和内外侧面的环形轨道上,电机机组的转子同时布置在飞轮转子底部、顶部和内外侧面的环形轨道上,进一步提高储能系统的比功率。
进一步的,永磁同步直线电机机组采用分扇区供电和控制策略,1/N个环形轨道的永磁同步直线电机为1套机组,并划分为1个供电扇区;整个环形轨道共有N套机组,总计N个供电扇区;
每个机组和供电扇区由变流设备单独供电和控制,以增加储能系统的充电、放电功率,提高储能系统的比功率。
进一步的,所述的环形轨道无轴承磁悬浮飞轮储能系统运行在加速充电、匀速空载和减速发电这三个状态;在加速充电状态下,双边型永磁同步直线电机机组工作在电动机模式,驱动飞轮转子做加速运动,电网的电能经变流设备转换成为飞轮转子动能;在匀速空载状态下,双边型永磁同步直线电机机组不工作,飞轮转子做匀速运动,无电网电能和飞轮转子动能之间的能量转换;在减速发电状态下,双边型永磁同步直线电机机组工作在发电机模式,制动飞轮转子使其减速,飞轮转子的动能经变流设备转换成为电网的电能。
进一步的,所述的环形轨道无轴承磁悬浮飞轮储能系统中,或将飞轮转子设计成实心圆柱体,进一步增加飞轮转子的质量以提高系统的储能容量;此时,飞轮转子的导向力仅由布置在真空腔体内侧面的环形导向永磁体和导向电磁体提供;飞轮转子的驱动/制动由布置在真空腔体底部环形轨道上的永磁同步直线电机机组控制,永磁同步直线电机机组同样布置在真空腔体内侧面环形轨道上,或者同时布置在真空腔体内的底部、顶部和侧面环形轨道上
本发明具有如下优点:
1.单体容量大。本发明真空环形轨道无轴承磁悬浮飞轮储能系统没有轴承,故与现有飞轮储能系统相比,本发明中的飞轮转子在刚度和强度上限制较小。因此,本发明的真空环形轨道无轴承磁悬浮飞轮储能系统的单体容量可远大于现有飞轮储能系统的单体容量,可达现有大规模储能技术的储能量水平,从根本上改变现有飞轮储能技术单体容量小、成本高和阵列后控制复杂的问题。
2.比功率高。本发明提出了新的驱动结构和控制策略,飞轮转子由布置在真空腔体底部(或布置在真空腔体内侧面环形轨道上,或者同时布置在真空腔体内的底部、顶部和侧面环形轨道上)的永磁同步直线电机机组控制。真空环形轨道无轴承磁悬浮飞轮储能系统的永磁同步直线电机机组采用分扇区供电和控制策略,整个储能系统相当于有4套或更多套大功率双边型永磁同步直线电机机组协同工作,可大幅增加储能系统的比功率。
3.成本低。本发明真空环形轨道无轴承磁悬浮飞轮储能系统不需要轴承,故可对飞轮转子进行大尺寸、大重量设计。合理设计飞轮转子转速,可在提高储能系统单体容量和比功率的同时,有效降低系统的储能成本。
4.稳定性强。本发明真空环形轨道无轴承磁悬浮飞轮储能系统的飞轮转子和真空腔体均为空心圆柱体状、且同轴,这一对称结构设计使得飞轮转子能自行抵消掉绝大部分导向力。另外,布置在侧壁环形轨道上的导向永磁体和导向电磁体共同克服剩余的导向力,可有效避免飞轮转子偏心等不稳定因素。
5.响应快。本发明真空环形轨道无轴承磁悬浮飞轮储能系统属于飞轮储能技术的扩展,自然具有响应快的优点。
6.效率较高。本发明真空环形轨道无轴承磁悬浮飞轮储能系统属于大规模储能技术范畴,优化设计电机机组的参数和悬浮/导向电磁力与悬浮/导向永磁力的比值以减少电机损耗和电磁铁的线圈损耗,可保证储能系统的效率达80%,大于现有的大规模储能技术。
附图说明
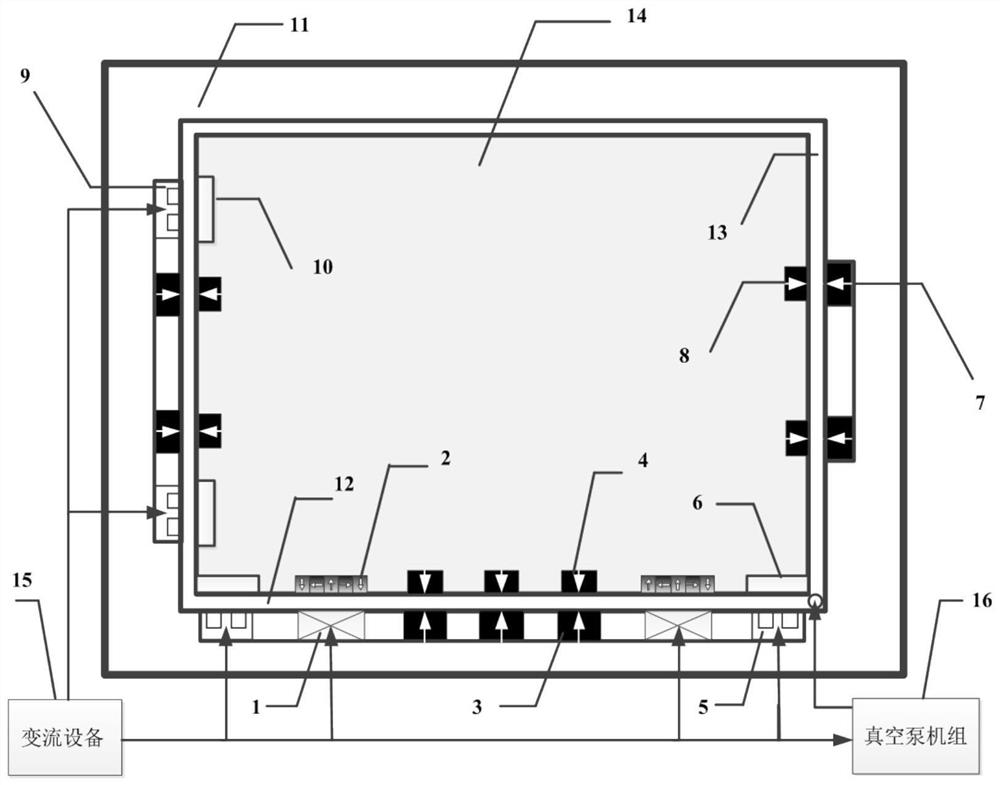
图1为本发明实施例1的真空环形轨道无轴承磁悬浮飞轮储能系统的横截面主视图;
图2为本发明实施例1的真空环形轨道无轴承磁悬浮飞轮储能系统的俯视图;
图3为本发明实施例2的真空环形轨道无轴承磁悬浮飞轮储能系统的横截面主视图;
图4为本发明实施例2的真空环形轨道无轴承磁悬浮飞轮储能系统的俯视图;
图5为本发明实施例3的真空环形轨道无轴承磁悬浮飞轮储能系统的主视图;
图6为本发明实施例3的真空环形轨道无轴承磁悬浮飞轮储能系统的主视图。
具体实施方式
为了使本发明的具体方案和优势表述得更加清楚,下面结合附图和具体实施例对本发明作进一步描述:
根据本发明的实施例1,如图1和图2所示,真空环形轨道无轴承磁悬浮飞轮储能系统中,双边型永磁同步直线电机机组转子2和定子1、轮载悬浮永磁体4、轨道悬浮永磁体3、轮载悬浮电磁体6、轨道悬浮电磁体5、轮载导向永磁体8、轨道导向永磁体7、轮载导向电磁体10、轨道导向电磁体9和飞轮转子14布置在真空腔体11内部,真空泵机组16和变流设备15布置在真空腔体11外部。真空腔体11为空心圆柱体状,且空心圆柱体外侧面半径约为内侧面半径(即圆柱空心部分的半径)的5-50倍;飞轮转子14同为空心圆柱体状,与真空腔体11同轴,真空腔体11的尺寸减去导向气隙13的宽度即为飞轮转子14的尺寸。双边型永磁同步直线电机机组的定子1布置在真空腔体11底部或侧面的环形轨道上,电机的转子2布置在飞轮转子14的底部或侧面,双边型永磁同步直线电机机组的转子2和定子1在水平方向平行、垂直方向相对,两者之间的间隙为电机气隙,组成永磁同步直线电机驱动/发电系统。悬浮永磁体包括轮载悬浮永磁体4和轨道悬浮永磁体3,轮载悬浮永磁体4布置在飞轮转子14的底部,轨道悬浮永磁体3布置在真空腔体11的底部环形轨道上;悬浮电磁体包括轮载悬浮电磁体6和轨道悬浮电磁体5,轮载悬浮电磁体6布置在飞轮转子14的底部,轨道悬浮电磁体5布置在真空腔体11的底部环形轨道上;轮载悬浮永磁体4与轨道悬浮永磁体3、轮载悬浮电磁体6与轨道悬浮电磁体5在水平方向平行、垂向方向相对,两者之间的气隙高度为悬浮高度12。导向永磁体包括轮载导向永磁体8和轨道导向永磁体7,轮载导向永磁体8布置在飞轮转子14的侧面,轨道导向永磁体7布置在真空腔体11的侧面环形轨道上;导向电磁体包括轮载导向电磁体8和轨道导向悬浮电磁体7,轮载导向悬浮电磁体8布置在飞轮转子14的外侧面,轨道导向电磁体7布置在真空腔体11的侧面环形轨道上。轮载导向永磁体8与轨道导向永磁体7、轮载导向电磁体10与轨道导向电磁体9在水平方向相对、垂向方向平行,两者之间的气隙宽度为导向宽度13。真空泵机组16的抽气端布置在真空腔体11的内侧壁的任意位置,真空泵机组16位于真空腔体11壁外的任意位置。变流设备15位于真空腔体11壁外的任意位置,与双边型永磁同步直线电机机组定子1、真空泵机组16、轨道悬浮电磁体5和轨道导向电磁铁9连接供电,分别驱动和制动永磁同步直线电机机组定子1和转子2、维持真空腔体11内部的真空或亚真空状态和控制轨道悬浮电磁体5和轨道导向电磁铁9的电流大小。
所述的飞轮转子14不带轴承,其悬浮力由底部环形轨道上布置的悬浮永磁体(包括3和4)和悬浮电磁体(包括5和6)提供,导向力由侧壁环形轨道上布置的导向永磁体(包括7和8)和导向电磁体(包括9和10)提供。飞轮转子14可设计成大尺寸、大重量的空心圆柱体,根据其尺寸的大小,可整体制成,也可分块制作再拼接固定而成。飞轮转子14可以由任意高密度、高强度和刚度的某种单一材料或均匀混合材料制成。
所述的轮载悬浮永磁体4、轨道悬浮永磁体3、轮载导向永磁体8和轨道导向永磁体7采用永磁单体或永磁Halbach阵列。三组(或多组)轮载悬浮永磁体4和轨道悬浮永磁体3沿底部环形轨道布置并拼接成环状。四组(或多组)轮载导向永磁体8和轨道导向永磁体7中有两组(或多组)布置在外侧面环形轨道上,另外两组(或多组)布置在内侧面环形轨道上,每组沿外、内侧面环形轨道布置并拼接成环状。三组(或多组)拼成环状的轮载悬浮永磁体4和轨道悬浮永磁体3、四组(或多组)拼成环状的轮载导向永磁体8和轨道导向永磁体7均分别提供主要的悬浮力和导向力,且环状永磁体的组数设计和布置位置能最大限度降低系统成本的同时,有效地提高大尺寸、大重量飞轮转子14的悬浮和导向性能。
所述的轮载悬浮电磁体6和轨道导向电磁体5由山字型铁芯和线圈组成,轮载悬浮电磁体6和轮载导向电磁体5为导磁铁板。两组(或多组)轮载悬浮电磁体6和轨道悬浮电磁体5沿底部环形轨道布置并拼接成环状;两组(或多组)轮载导向电磁体10和轨道导向电磁体9沿侧面环形轨道布置并拼接成环状。两组(或多组)拼成环状的轮载悬浮电磁体6和轨道悬浮电磁体5、两组(或多组)拼成环状的轮载导向电磁体10和轨道导向电磁体9均分别提供辅助的悬浮力和导向力,且环状电磁体的组数设计和布置位置能最大限度降低系统成本的同时,有效地保证大尺寸、大重量飞轮转子14的悬浮和导向性能。
所述的双边型永磁同步直线电机机组为发电和电动一体化电机。永磁同步直线电机机组的定子1由铁芯和线圈组成,沿真空腔体11底部的环形轨道布置;永磁同步直线电机机组的转子2由永磁单体或Halbach阵列而成,沿飞轮转子14底部的环形轨道布置。永磁同步直线电机机组采用分扇区供电和控制策略,1/4个环形轨道的永磁同步直线电机为1套电机机组,并划分为1个供电扇区;整个环形轨道共有4套机组,总计4个供电扇区。当然,根据飞轮转子14的尺寸和重量大小,也可划分为6套机组和供电扇区(或更多套机组和供电扇区)等。每个机组和供电扇区由变流设备单独供电和控制,以增加储能系统的充电、放电功率,提高储能系统的比功率。
所述的双边型永磁同步直线电机机组的定子1还可以布置在真空腔体11内外侧面的环形轨道上,电机机组的转子2布置在飞轮转子14内外侧面的环形轨道上;或者,电机机组的定子1可同时布置在真空腔体11内底部、顶部和内外侧面的环形轨道上,电机机组的转子2同时布置在飞轮转子14底部、顶部和内外侧面的环形轨道上,进一步提高储能系统的比功率。
所述的环形轨道无轴承磁悬浮飞轮储能系统运行在加速充电、匀速空载和减速发电这三个状态。在加速充电状态下,双边型永磁同步直线电机机组(包括定子1和转子2)工作在电动机模式,驱动飞轮转子14做加速运动,电网的电能经变流设备15转换成为飞轮转子14动能。在匀速空载状态下,双边型永磁同步直线电机机组(包括定子1和转子2)不工作,飞轮转子14做匀速运动,无电网电能和飞轮转子14动能之间的能量转换。在减速发电状态下,双边型永磁同步直线电机机组(包括定子1和转子2)工作在发电机模式,制动飞轮转子14使其减速,飞轮转子14的动能经变流设备15转换成为电网的电能。
图3和图4所示为本发明的实施例2,实施例所述的环形轨道无轴承磁悬浮飞轮储能系统中,飞轮转子14还可以设计成实心圆柱体,相当于其内径(即内侧面半径)为0,该设计可进一步增加飞轮转子14的重量,进而提高系统的储能容量。此时,飞轮转子14的导向力仅由布置在真空腔体11内侧面的环形导向永磁体(包括7和8)和导向电磁体(包括9和10)提供。飞轮转子14的驱动/制动由布置在真空腔体11底部的永磁同步直线电机机组(包括定子1和转子2)控制。当然,在这种实例中永磁同步直线电机机组(包括定子1和转子2)同样可以布置在真空腔体11内侧面环形轨道上,或者同时布置在真空腔体11内的底部、顶部和侧面环形轨道上。
图5和图6所示为本发明的实施例3,实施例所述的环形轨道无轴承磁悬浮飞轮储能系统中,如图5中双边型永磁同步直线电机机组的定子1可以布置在真空腔体11内外侧面的环形轨道上,电机机组的转子2布置在飞轮转子14内外侧面的环形轨道上;或者,如图6中电机机组的定子1可同时布置在真空腔体11内底部、顶部和内外侧面的环形轨道上,电机机组的转子2同时布置在飞轮转子14底部、顶部和内外侧面的环形轨道上,进一步提高储能系统的比功率。
尽管上面对本发明说明性的具体实施方式进行了描述,以便于本技术领域的技术人员理解本发明,且应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
- 一种真空环形轨道无轴承磁悬浮飞轮储能系统
- 一种无支点、无摩擦永磁磁悬浮轴承