一种遥感图像精细化几何纠正方法
文献发布时间:2023-06-19 11:35:49
技术领域
本申请涉及遥感影像优化的技术领域,具体涉及一种遥感图像精细化几何纠正方法。
背景技术
遥感技术的进步极大地提高了遥感数据产品的科学应用潜力,卫星遥感数据在国民生产建设各领域中的应用越来越广泛。遥感数据作为空间数据,具有空间地理位置的概念。在遥感数据应用之前,须将其投影到需要的地理坐标系中。几何纠正是遥感数据几何处理的重要一步。遥感图像的几何纠正是为了消除图像中的几何变形,生产一幅符合某种地图投影或图形表达要求的新图像。它包括两个环节:一是像素坐标的变换,即将图像坐标转变为地图或地面坐标;二是对坐标变换后的像素亮度值进行重采样。
从输入到输出的前向映射几何纠正方法可能导致输出图像网格数值为空的情况。大部分遥感图像采用从输出到输入逆向映射的方式进行几何纠正。图像亮度值重采样时,周围像素亮度值对被采样点贡献的权可用重采样函数来表达。现有技术在遥感图像处理过程中,有三种常用的重采样算法:最邻近像元采样法、双线性内插法和双三次卷积内插法。
然而上述的三种重采样算法分别具有以下技术问题:最邻近像元采样法简单,亮度值保真较好,但是它造成像素点在一个像素范围内位移,几何精度差;双线性内插法计算较为简单,具有一定的亮度采样精度,具有平均化的滤波效果,但是会使图像略变模糊;双三次卷积内插法具有图像的均衡化和清晰化的效果,几何精度高,但是计算量大。
公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
发明内容
为解决现有技术中最邻近像元采样法、双线性内插法和双三次卷积内插法的上述技术问题,本发明提出一种遥感图像精细化几何纠正方法,其具体是遥感图像前向映射的几何纠正方法。该方法计算过程简单,能保持图像的均衡化和清晰化,并能避免输出图像像素点值为空的情况。
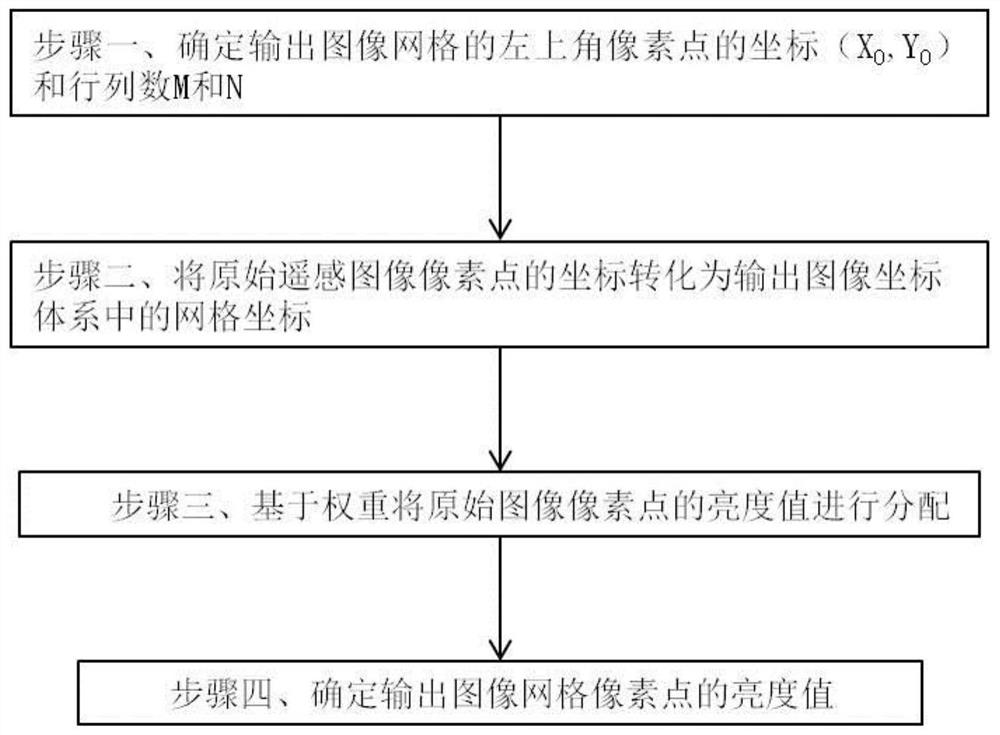
本发明提出的遥感图像几何纠正的方法包括下列步骤:
步骤一、确定输出图像网格的左上角像素点的坐标(X
输出图像网格的左上角的坐标(X
(1)根据原始图像像素点坐标信息、水平和垂直方向空间分辨率ΔX和ΔY确定输出图像网格的左上角的坐标(X
读取原始图像四个角点的坐标,得到4对坐标值,分别对横向坐标X和纵向坐标Y值分别求其最小值(X
X
Y
(2)根据需要自定义输出图像网格的左上角的坐标(X
至此,在输出图像坐标体系A-x′,y′中,每个像素可由其所在的行列号来确定其位置。行列号的取值范围为:
x′=1,2,…,M
y′=1,2,…,N
步骤二、将原始遥感图像像素点的坐标转化为输出图像坐标体系中的网格坐标。
原始图像像素点的横向坐标为X和纵向坐标为Y,并且原始图像像素点坐标在输出图像坐标体系A-x′,y′中位置为:
至此,行列数分别为L和C的原始图像像素点坐标对应在输出图像中的位置坐标可以表示为:
步骤三、基于权重将原始图像像素点的亮度值进行分配。
(1)参数计算
行列号分别为i和j的原始图像像素点亮度值影响范围在以其为中心的椭圆范围内,椭圆函数为:
f(u,v)=au
式中,a、b、c为椭圆参数;1 该椭圆函数满足以下条件: f(u f(u
式中,g为放大系数,通常可以设为1.0,可以根据实际情况调整,以减少输出图像网格为空的情况。a、b、c求解为:
如果
至此,该像素点相关参数a、b、c、u (2)确定原始图像中像素的亮度值对输出图像亮度的贡献的权重 行列号分别为i和j的原始图像像素的亮度值T v1=取整(x′ v2=取整(x′ u1=取整(y′ u2=取整(y′ 输出图像行列号为q和p的像素点被赋值的权为w,被该原始图像像素点亮度值赋值为T′ k=a(p-y′ w=exp(-f×k) T′ 式中,f为给定正常数,f>2.0。 步骤四、确定输出图像网格像素点的亮度值。 在所有原始图像像素点亮度值完成赋值后,开始计算输出图像像素点的亮度值。任一输出图像像素点被赋的亮度值的累计值为T′
至此,实现从原始图像一个像素点亮度值到输出图像像素点的配置过程。所有输出图像像素点灰度值确定后,完成图像纠正过程。 本发明通过定量描述由输入遥感图像像素点亮度值到输出图像像素点分配的权值,确定输出图像网格像素点的亮度值,进而实现遥感图像几何纠正方法。计算过程直接,可以避免输出图像像素点为空的情况。与目前的技术相比,本发明提出的技术方案中建立了定量确定输入遥感图像像素点亮度值配置到输出图像素点贡献度的方法,避免了前向映射几何校正方法可能导致输出遥感图像像素点值为空的难题。 附图说明 为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。 图1:根据本发明的遥感图像几何纠正的方法的主流程图。 具体实施方式 下面将结合发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。 如图1所示,本发明提出的遥感图像几何纠正的方法包括下列步骤: 步骤一、确定输出图像网格的左上角像素点的坐标(X 输出图像网格的左上角的坐标(X (1)根据原始图像像素点坐标信息、水平和垂直方向空间分辨率ΔX和ΔY确定。 读取原始图像四个角点的坐标,得到4对坐标值,分别对横向坐标X和纵向坐标Y值分别求其最小值(X X Y
(2)根据需要自定义输出图像网格的左上角的坐标(X 至此,在输出图像坐标体系A-x′,y′中,每个像素可由其所在的行列号来确定其位置。行列号的取值范围可为: x′=1,2,…,M y′=1,2,…,N 步骤二、将原始遥感图像像素点的坐标转化为输出图像坐标体系中的网格坐标。 原始图像像素点的横向坐标为X和纵向坐标为Y,并且原始图像像素点坐标在输出图像坐标体系A-x′,y′中位置为:
至此,行列数分别为L和C的原始图像像素点坐标对应在输出图像中的位置坐标可以表示为:
步骤三、基于权重的原始图像像素点的亮度值分配。 (1)参数计算 行列号为i和j的原始图像像素点亮度值影响范围在以其为中心的椭圆范围内,椭圆函数为: f(u,v)=au 式中,a、b、c为椭圆参数;1 该椭圆函数满足以下条件: f(u f(u
式中,g为放大系数,通常可以设为1.0,可以根据实际情况调整,以减少输出图像网格为空的情况。a、b、c求解为:
如果
至此,该像素点相关参数a、b、c、u (2)原始图像中像素的亮度值对输出图像亮度的贡献的权重 行列号为i和j的原始图像像素的亮度值T v1=取整(x′ v2=取整(x′ u1=取整(y′ u2=取整(y′ 输出图像行列号为q和p的像素点被赋值的权为w,被该原始图像像素点亮度值赋值为T′ k=a(p-y′ w=exp(-f×k) T′ 式中,f为给定正常数,f>2.0。 步骤四、确定输出图像网格像素点的亮度值。 在所有原始图像像素点亮度值完成赋值后,开始计算输出图像像素点的亮度值。任一输出图像像素点被赋的亮度值的累计值为T′
至此,实现从原始图像一个像素点亮度值到输出图像像素点的配置过程。所有输出图像像素点灰度值确定后,完成几何纠正过程。 本发明通过定量描述由输入遥感图像像素点亮度值到输出图像像素点分配的权值,确定输出图像网格像素点的亮度值,进而实现遥感图像几何纠正方法。计算过程直接,可以避免输出图像像素点为空的情况。 与目前的技术相比,本发明提出的技术方案中建立了定量确定输入遥感图像像素点亮度值配置到输出图像素点贡献度的方法,避免了前向映射几何校正方法可能导致输出遥感图像像素点值为空的难题。 以上实施例结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于此。在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型。为了避免不必要的重复,本发明对各种可能的简单变型不再另行说明。但这些简单变型应当视为本发明所公开的内容,均属于本发明的保护范围。
- 一种遥感图像精细化几何纠正方法
- 一种遥感图像自动几何纠正的系统框架和方法