一种基于高分辨率遥感影像输电杆塔识别与定位方法
文献发布时间:2023-06-19 11:35:49
技术领域
本发明属于图像处理技术领域,尤其是涉及一种基于高分辨率遥感影像输电杆塔识别与定位方法。
背景技术
坚强智能电网及能源互联网的快速发展,我国形成了以特高压输电通道为骨干的电网体系。然而,特高压电网输送距离长、覆盖范围大,环境条件复杂,易受到强风、冰冻、雷击、洪水、外破等各种自然和人为灾害的影响,常常造成杆塔倒塔、塔头大幅形变、杆塔倾斜、塔材丢失、主材弯曲等严重的杆塔结构故障。高压输电杆塔是电气设施中最重要的基础设施之一,其运行状态决定着整个电网的运行稳定和安全,而且输电杆塔的检测也极其重要。
目前输电杆塔的检测主要有人工实地调查、无人机巡检(参考:王万国,刘俍,王滨海等人.一种用于无人机巡检输电线路杆塔的识别方法:中国,201510219238.8)、直升机巡检、航空数字摄影巡检、在线装置(参考:张建勇,周海,朱宝忠,吴军,王晶.一种杆塔位置的定位方法和装置:中国,201410855677.3)等方法,存在监测范围小、在恶劣环境和大范围灾害条件下工作受限等缺点,为了保证这些骨干电网的安全和稳定运行,亟需一种监测范围广、周期短、效率高且成本低的监测新手段,另一方面,遥感卫星快速发展,遥感影像分辨率越来越高,利用遥感影像进行大面积的输电杆塔目标检测加快了电网行业的智能化。但是目前基于遥感影像的电塔检测方法一般采用人工解译或者是机器检测,人工解译需花费大量的人力物力,并且受人的主观影响,机器检测的方法泛化能力差,无法适应输电杆塔的多样性。随着人工智能的快速发展,国家电网的智能化是电网行业的共同发展目标。高压输电杆塔的自动检测在国家电网的智能化中极其重要。
近些年来,深度学习的快速发展得到广泛关注,它能够从海量影像数据中学习目标特征,为自动提取目标特征提供了一个有效的框架(参考:陆峰,刘华海,黄长缨,杨艳,谢禹,刘财喜.基于深度学习的目标检测技术综述.Computer Systems&Applications,2021,30(3):1-13[doi:10.15888/j.cnki.csa.007839])。如YOLOv3,YOLOv3使用Darknet-53网络,并且采用多个尺度融合的方式做检测,对小目标的检测精度有很大改善(参考:JosephRedmon,Ali Farhadi University of Washington.YOLOv3:An IncrementalImprovement)。其中YOLOv3是目前为止速度和精度最为均衡的目标检测网络,并且在目标检测任务中性能表现尤为突出。由于输电杆塔在遥感影像中呈现出不同的形状而且检测任务中只有输电杆塔一类,原始的先验框不适用,另一方面由于输电杆塔的复杂结构,特征提取的层数加深目标的细节和位置信息逐渐减少(参考:Kaiming He,Xiangyu Zhang,Shaoqing Ren,and Jian Sun.Spatial Pyramid Pooling in Deep ConvolutionalNetworks for Visual Recognition)。
综上,针对输电杆塔的定位方法存在成本高、耗时耗力的问题,高分辨率遥感影像中输电杆塔的形状、复杂结构问题,特征提取的层数加深目标的细节和位置信息逐渐减少的问题,本发明以目前最受工业欢迎的YOLOv3算法的基础上进行改进,以实现工期短、效率高、大范围面积的输电杆塔检测与定位,为电网的智能化提供支持。
发明内容
本发明针对输电杆塔在遥感影像中呈现出不同的形状,通过K-means重新设置锚框的大小,并在边框回归中引入CIoU损失函数,将DIoU与NMS结合,改善YOLOv3对密集小目标的漏检问题。针对特征提取的层数加深目标的细节和位置信息逐渐减少的问题,通过增加SPP模块实现局部特征和全局特征的特征图融合,丰富最终特征图的表达能力,从而提高电塔检测的精度。最后通过本文方法解决了YOLOv3对超大图像目标检测算法失效的问题以及电塔的高精度定位问题,为电力行业的智能化提供支持。
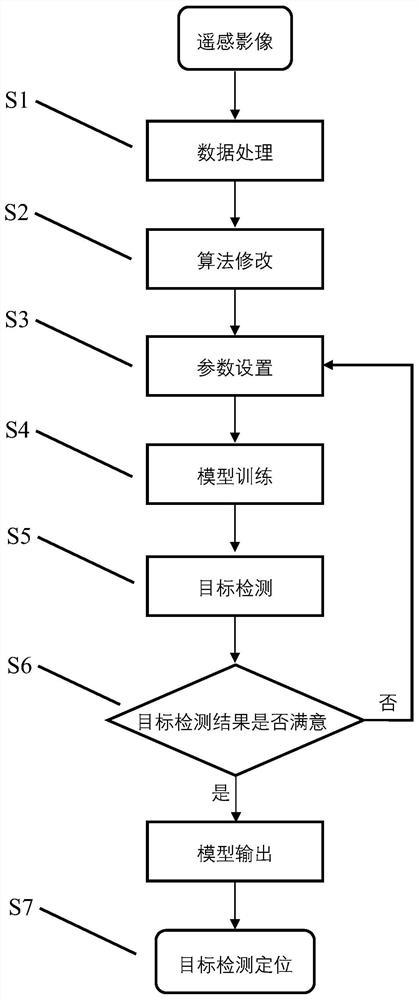
为实现上述目的,本发明包括以下步骤:
S1:数据处理主要包括数据的几何纠正、图像融合,通过人工进行筛选,获取不同背景、不同成像形状的输电杆塔数据集。数据集图片像素大小为416x 416;将杆塔图片制作成PASCAL VOC格式的数据集并划分为训练集、验证集、测试集进行数据增广操作;
S2:根据S1中的数据集计算anchor,并替换IoU的损失函数以及非极大值抑制的改进,增加SPP模块,构建输电杆塔目标检测网络;
S3:调整网络训练参数,利用S1得到的训练数据对S3得到的目标检测网络进行最后的网络参数调整得到较好的检测模型;
S4:根据S1得到的测试集、验证集与S3得到的训练网络进行输电杆塔模型训练;
S5:根据S1得到的测试集、验证集与S4得到的输电杆塔检测模型进行输电杆塔检测进行测试;
S6:根据S5测试结果来判断模型是否输出和进行参数设置继续训练与测试,循环此操作直到得到检测模型;
S7:根据S6得到杆塔检测模型进行输电杆塔的检测与定位。
进一步的,步骤S1中数据处理主要包括:处理原始数据的方法为几何纠正、图像融合,使用工具为ENVI;使用Python程序将遥感影像原图裁剪为416*416像素值大小;数据增广主要利用Python程序对数据集进行旋转、平移、缩放等操作来增加数据的多样性以及避免过拟合;编程语言为Python3.6。
进一步的,步骤S2中修改anchor,使用K-means算法多次计算并求平均得到的,替换了IoU的损失函数以及非极大值抑制(DIoU-NMS)使得杆塔的检测框更加精准,增加了SPP网络使得不同层的杆塔特征更加丰富;其中CIoU损失函数、DIoU-NMS公式如下:
CIoU损失函数:
其中:
DIoU-NMS:
其中:
进一步的,步骤S3中调整网络参数:最大迭代次数为20000,批次大小设为64(根据计算机性能来设),动量设为0.9,衰减系数为0.0005,学习率设为0.001分为为了使模型尽快收敛,减少过拟合,初始学习率设定为0.001,批量大小设置为64,在迭代次数为16000、18000时调整学习率。
进一步的,步骤S7杆塔输电杆塔检测与定位,电塔的粗略位置位置计算,对要检测的遥感影像裁剪为深度学习目标检测网络所需要的尺寸,并将得到的裁剪影像的左上角经纬度坐标保存在txt文本中,在步骤S5得到检测结果的杆塔最小外接矩形的左上角像素坐标(x,y),并在裁剪后的tif影像中计算得到杆塔的粗略坐标;然后在步骤S5中得到杆塔的最小外接矩形图片,进一步对杆塔的四个根基进行识别,最后得到像素坐标(x,y)还原到tif影像中的到杆塔的精确经纬度坐标。
由上,本发明针对基于遥感影像的输电杆塔检测方法一般采用人工解译或者是机器检测,人工解译需花费大量的人力物力,并且受人的主观影响,机器检测的方法泛化能力差,无法适应输电杆塔的多样性等问题提出了一种基于高分辨率遥感影像输电杆塔识别与定位方法为电网智能化提供支持,并且为后续遥感影像输电杆塔检测的深入研究有一定的意义。
附图说明
图1为本发明一种基于高分辨率遥感影像输电杆塔识别与定位方法流程图;
图2为不同地区的杆塔图;
图3为YOLOv3网络结构图;
图4为SPP模块结构图;
图5为大图检测流程图;
图6为本发明算法和原始算法对比图。
具体实施方式
按图1所示步骤,对本发明一种基于高分辨率遥感影像输电杆塔识别与定位方法进行详细说明。
步骤1:数据处理包括采集高分辨率遥感影像作为原始数据,进行数据标注、数据增广等操作,详细操作如下:
(1)原始影像包括全色影像和多光谱影像,使用ENVI软件将原始数据进行纠正与融合,得到高分辨率影像;
(2)将得到的高分辨率遥感影像使用Python程序裁剪为网络训练所需的尺寸(416*416)如图2所示不同地区的样例;
(3)裁剪后的tif影像转成jpg格式,按照VOC数据格式使用LableImg软件进行数据集标注,并将数据集随机划分为训练集、验证集、测试集;
(4)数据集增广,使用Python程序进行旋转、平移、缩放等操作。
步骤2:对原始网络进行修改网络,详细步骤如下:
(1)采用K-means聚类算法对输电杆塔数据集进行多次聚类求得平均聚类结果为:(20,27)、(29,35)、(31,43)、(57,34)、(43,58)、(59,59)、(56,94)、(104,47)、(98,104),替换原始的COCO数据集的anchor;
(2)将YOLOv3原始的IoU替换为能够更好的衡量预测框和目标框之间重叠关系的CIoU,并且将YOLOv3中的非极大值抑制(NMS)算法替换为能够更好消除多余边框的DIoU-NMS,在YOLOv3的网络(如图3所示)下加入spp模块(如图4所示)实现局部特征和全局特征的featherMap级别的融合,丰富最终特征图的表达能力,从而提高输电杆塔的检测精度(如图6所示)。
步骤3:训练参数设置:最大迭代次数为20000,批次大小设为64(根据计算机性能来设),动量设为0.9,衰减系数为0.0005,学习率设为0.001分为为了使模型尽快收敛,减少过拟合,初始学习率设定为0.001,批量大小设置为64,在迭代次数为16000、18000时调整学习率。在调整为合适的参数之后,训练也平稳的收敛。
步骤4:根据步骤S1得到的测试集、验证集与步骤S3得到的训练网络进行输电杆塔模型训练。
步骤5:根据步骤S1得到的测试集、验证集与步骤S4得到的输电杆塔检测模型进行输电杆塔检测进行测试。
步骤6:根据步骤S5测试结果来判断模型是否输出和进行参数设置继续训练与测试,循环此操作知道目标检测结果满意为止。
步骤7:根据步骤S6得到杆塔检测模型进行输电杆塔的检测与定位,其中大图检测流程如图5所示,详细步骤如下:
(1)需要识别的影像进行裁剪操作,并保存对应的左上角经纬度坐标,将tif影像转成jpg格式,挑选训练好的目标检测模型进行输电杆塔目标检测,得到输电杆塔最小外接矩形框的左上角坐标值,将坐标值还原到相应的tif影像中求得输电杆塔的粗略经纬度坐标;
(2)将步骤5得到的输电杆塔检测结果以矩形框进行裁剪操作,进一步对杆塔的四个根基进行识别,最后得到像素坐标(x,y)还原到tif影像中的到杆塔的精确经纬度坐标。
本发明一种基于高分辨率遥感影像输电杆塔识别与定位方法,针对传统的高分辨率遥感影像应用尤其是目标的自动识别与定位领域,还长期依赖人工手段、目视判读,容易出现误判和漏判目标的情况,检测精度也比较低的问题。因此提出将深度学习应用在高分变率遥感影像的输电杆塔的自动识别和定位中来提升电力系统的智能化水平。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于高分辨率遥感影像输电杆塔识别与定位方法
- 一种基于高分辨率遥感影像的城市功能区识别方法