一种基于机器视觉的自动移动消毒小车
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及基于机器视觉技术领域,具体涉及一种基于机器视觉的自动移动消毒小车。
背景技术
随着计算机,微电子技术的快速发展,智能化技术的开发越来越快,智能程度也越来越高,应用的范围也得到了极大的扩展。智能小车系统以迅猛发展的汽车电子技术为背景,涵盖了电子,计算机,机械,传感技术等多个学科。同时,当今机器人技术的发展日新月异,其应用于考古,探测,国防等众多领域。无人飞船,外星探测,智能化生产等等无不得益于机器人技术的发展。一些发达国家已经把机器人设计制作竞赛作为创新教育的战略手段。从某种意义上来说,机器人技术反映的是一个国家综合技术实力的高低。与此同时,随着集成电路的发展,树莓派在图像处理以及机器控制领域发挥重要的作用,结合强大外围电路,用嵌入式编程等手段可以制作拓展性良好的移动机器人.智能小车具备环境感知、路径规划、自主控制运行状态等功能,成为移动机器人领域一个重要研究方向。
恰巧2020年全世界因为新冠病毒的影响,学校,商场,医院等各种人员密集性公共场所都更需要消毒杀菌,保持卫生。而“基于机器视觉的自动移动消毒小车”正是符合当下形势应运而生的新型智能化移动小车,对现实中的智能化汽车的开发,发展具有巨大的实际价值。
为了给医院商场等大型场所消毒,构建基于机器视觉的自动移动消毒小车模型,小车由避障小车和消毒水喷洒装置结合,可以在既定规划的线路内实现自动喷洒消毒液和陌生环境下躲避简单障碍,和摄像头监控相关的功能。避障需要机器人本体、感知单元、智能算法等多方面综合协调,是衡量移动智能机器人智能化程度的关键指标,在机器人应用技术日益满足各种实际需求的过程中,智能小车避障系统的实现得到了国内外学者的广泛关注。
发明内容
本发明的目的在于针对现有技术中不足与缺点,提供一种基于机器视觉的自动移动消毒小车,使其设备具有自动避障、循迹、实时图像传输、智能喷洒消毒水及目标检测等多种功能。
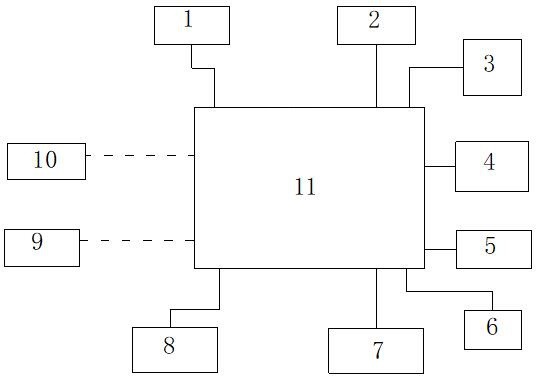
为实现上述目的,本发明采用以下技术方案是:一种基于机器视觉的自动移动消毒小车,它包括电池模块1、舵机2、超声波传感器3、红外巡线传感器4、喷洒模块5、LED灯6、电机7、USB摄像头8、PC模块9、移动控制端10、主板驱动板11,所述电池模块1与主板驱动板11电性连接,所述舵机2通过主板驱动板11与电机7相连接,所述超声波传感器3与红外巡线传感器4连接主板驱动板11,所述主板驱动板11连接喷洒模块5,所述LED灯6电性连接在主板驱动板11上,所述USB摄像头8设置在主板驱动板11上,所述主板驱动板11连接PC模块9与移动控制端10。
更为优化的,所述基于机器视觉的自动移动消毒小车的运行步骤具体为:开始并驱动喷洒模块5与LED灯6;通过超声波传感器3与红外巡线传感器4获取外界信息;将其信息传送至主板驱动板11上;主板驱动板11判断并计算行径路线;控制电机舵机2与电机7运动;返回起点并结束驱动喷洒模块5与LED灯6。
更为优化的,所述超声波传感器3与红外巡线传感器4获取的信息包括外界物品距离、预设路线等。
更为优化的,所述主板驱动板11与PC模块9的连接方式为wifi或网线连接,所述主板驱动板11与移动控制端10的连接方式为wifi无线连接方式。
更为优化的,所述主板驱动板11根据超声波传感器3的信息判断步骤为:获取超声波传感器3的信息;调用测距函数;判断超声波传感器3距离值大于0cm小于25cm;若大于25cm则进行前进;若大于0cm小于25cm则停车等待并左转等待,再次获取超声波传感器3的信息;当距离值大于25cm后继续前进。
更为优化的,所述USB摄像头8通过主板驱动板11连接PC模块9与移动控制端10。
本发明的工作原理:在进行使用时,工作人员应当保证其电池模块1为有电状态,而后将可以正常启动设备,设备在进行工作时,会首先驱动喷洒模块5,使其喷洒模块5能够进行喷洒消毒作业,而超声波传感器3与红外巡线传感器4会不断获取外界信息,并传输至主板驱动板11,主板驱动板11则通过超声波传感器3与红外巡线传感器4的信息进行判断其设备的行径路线,具体判断则是通过超声波传感器3所获取的数据,并根据0 采用上述技术方案后,本发明有益效果为:通过基于超声波传感器,使小车在运行过程中避开简单不复杂的障碍物,具有自动避障的功能,并能够基于六路红外传感器使小车沿既定车道线路循迹行驶,且能够通过USB摄像头,将其拍摄到的视频流传到PC端与移动控制端,并在PC端与移动控制端查看,并能够进行喷洒消毒作业 ,对于特殊标志物体能够继续识别获取,使其通过PC模块与移动控制端进行判断控制。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。 图1是本发明的结构示意图。 图2是本发明的系统框图。 图3是本发明中基于机器视觉的流程图。 图4是本发明中USB摄像头8的连接示意图。 附图标记说明:电池模块1、舵机2、超声波传感器3、红外巡线传感器4、喷洒模块5、LED灯6、电机7、USB摄像头8、PC模块9、移动控制端10、主板驱动板11。 具体实施方式 参看图1-图4所示,本具体实施方式采用的技术方案是:。 本发明的工作原理:它包括电池模块1、舵机2、超声波传感器3、红外巡线传感器4、喷洒模块5、LED灯6、电机7、USB摄像头8、PC模块9、移动控制端10、主板驱动板11,所述电池模块1与主板驱动板11电性连接,所述舵机2通过主板驱动板11与电机7相连接,所述超声波传感器3与红外巡线传感器4连接主板驱动板11,所述主板驱动板11连接喷洒模块5,所述LED灯6电性连接在主板驱动板11上,所述USB摄像头8设置在主板驱动板11上,所述主板驱动板11连接PC模块9与移动控制端10。 所述基于机器视觉的自动移动消毒小车的运行步骤具体为:开始并驱动喷洒模块5与LED灯6;通过超声波传感器3与红外巡线传感器4获取外界信息;将其信息传送至主板驱动板11上;主板驱动板11判断并计算行径路线;控制电机舵机2与电机7运动;返回起点并结束驱动喷洒模块5与LED灯6,所述超声波传感器3与红外巡线传感器4获取的信息包括外界物品距离、预设路线等。 所述主板驱动板11与PC模块9的连接方式为wifi或网线连接,所述主板驱动板11与移动控制端10的连接方式为wifi无线连接方式,所述USB摄像头8通过主板驱动板11连接PC模块9与移动控制端10。 所述主板驱动板11根据超声波传感器3的信息判断步骤为:获取超声波传感器3的信息;调用测距函数;判断超声波传感器3距离值大于0cm小于25cm;若大于25cm则进行前进;若大于0cm小于25cm则停车等待并左转等待,再次获取超声波传感器3的信息;当距离值大于25cm后继续前进。 本发明的工作原理:在进行使用时,工作人员应当保证其电池模块1为有电状态,而后将可以正常启动设备,设备在进行工作时,会首先驱动喷洒模块5,使其喷洒模块5能够进行喷洒消毒作业,而超声波传感器3与红外巡线传感器4会不断获取外界信息,并传输至主板驱动板11,主板驱动板11则通过超声波传感器3与红外巡线传感器4的信息进行判断其设备的行径路线,具体判断则是通过超声波传感器3所获取的数据,并根据0 以上所述,仅用以说明本发明的技术方案而非限制,本领域普通技术人员对本发明的技术方案所做的其它修改或者等同替换,只要不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。
- 一种基于机器视觉的自动移动消毒小车
- 一种自动移动消毒小车控制系统