一种多波束声呐系统参数的自适应调整方法
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及多波束声呐测量技术领域,具体涉及一种多波束声呐系统参数的自适应调整方法。
背景技术
多波束声呐是在一定空间范围内形成多个波束的声呐,因其一次可以发射多个波束同时获取多点信息,使得其覆盖的测量范围广、搜索速度快、效率和精度都高,越来越广泛地应用于海底地形扫测、目标搜探等作业。
在实际使用过程中,由于测试目的不同导致测试要求不同,水下地形环境的变化(水深变化、底部材质变化)、声呐安装载体姿态变化(包括横摇、纵摇、运动速度等),都会影响多波束声呐系统的测试效果,为提高测试效果,都需要根据现场声呐系统的实时测试效果对单套声呐系统的控制参数(声呐系统应用距离、声呐系统的孔径大小、声呐波束开角范围、声呐系统发射功率、声呐系统接收增益、图像展示色彩等)进行实时调整,现阶段这些调整通常是人为调整,由操作人员根据经验以及测量目的,实时对声呐参数进行调整,这样的调整方式过度依赖于操作人员的工作经验、工作强度大(整个测试过程都需要实时查看测试效果)、且存在滞后性。如果操作不当,不但会引入测试噪音,导致有用信号丢失,增大系统功耗;还会影响设备的使用寿命。同时过度依赖人为也将调整导致多波束系统无法与水下无人设备集成,限制了多波束声呐的应用。
发明内容
本发明的目的在于提供一种多波束声呐系统参数的自适应调整方法,解决现有系统参数依靠人工调整导致的调整效果差且不及时、过度依赖人为操作导致多波束声呐系统与其它水下无人设备集成存在障碍从而限制了多波束声呐应用的问题。
为解决上述的技术问题,本发明采用以下技术方案:一种多波束声呐系统参数的自适应调整方法,其特征在于包括如下步骤:
(1)根据多波束声呐系统的空间分辨率模型,得到波束在一定水深状况下底部覆盖的数据,包括一定角度下平行航向长度、垂直航迹方向长度;
(2)根据测试目的、测试水深状况、测试水下地形变化状况、测试水下底部材质、测试水域水文环境、在测试过程中声呐载体的最大航速、水面天气状况、载体振动以及噪音情况构建出多波束操作系统进行测试的基本控制模型,基本控制模型包括多波束声呐系统的开角设置、ping率设置、脉冲长短设置、发射功率设置、发射波束角度设置、近场聚焦设置、探测模式设置、根据测试目的坐标进行初始测线规划;
(3)根据步骤(2)生成的多波束声呐的基本控制模型,根据多波束声呐系统在测试过程声呐的运动姿态信息、系统测试干扰状况、系统整体图像状况,根据多波束声呐原理对测试过程中的多波束声呐控制参数进行自动迭代控制参数,具体为自适应的调整多波束声呐系统的自动控制参数;根据实现测试效率最优原则,具体在保证开角前提下保证边缘波束有效触底,降低旁瓣干扰,保证成像质量,降低功耗;根据本发明整个声呐系统将在整个测试过程中实现声呐系统控制参数自动迭代完成整个测试过程;
(4)根据步骤(3)进行多波束声呐基本控制模型迭代过程中实时记录多波束声呐的载体运动轨迹曲线,以及多波束声呐系统底部测宽覆盖曲线,多波束声呐系统将根据应用目的确定相邻测线覆盖要求自动规划下一条测线;
(5)当系统需要在同一个区域内完整覆盖测量,多波束声呐系统将实时反馈本系统规划轨迹曲线给载体,载体按步骤(4)选择性采用多波束声呐系统规划测线进行测量;当测试目的不要求对某一个测试区域进行全区域覆盖测试,那么测试时多波束声呐生成的自动规划测线反馈给载体后载体不采用时,多波束声呐行进测线根据步骤(3)中的初始测线进行整个测试。
更进一步的技术方案是所述步骤(1)中波束分辨率模型为Br(H,θ)={Lrθ,Wrθ,Rrθ},其中H是深度,θ是波束角度,在深度为H,开角为θ情况下,Lrθ为在一定角度下系统平行于航迹方向的长度分辨率,Wrθ为在一定角度下系统垂直于航迹方向的宽度分辨率,Rrθ为在一定角度下系统的距离分辨率;在已知水深、开角、多波束声呐系统工作脉冲长短,上述参数均可计算得出;得到的多波束声呐分辨率矩阵具体为:
上式中k代表的多波束声呐所实用的深度值序号,n代表多波束系统对应某一个波束的波束角度。
更进一步的技术方案是所述步骤(2)中测试过程中多波束声呐的基本控制模型可用如下函数表示:
声呐基本控制模型=F(测试环境参数,声呐控制参数)
其中,测试环境参数包括:测试目的,测试水深状况,测试地形变换状况,底部材质状况,水文环境;测试目的中有目标搜探、底部扫描以及目标搜探与底部扫描一起的联合应用三种情况,目标搜探过程中要求具备较高的分辨率、较少的干扰、较多的数据量,具体为有合适的设置阵列孔径以在不同水深状况下取得最佳的角度分辨率、少边缘杂波和少水体噪音、高的ping率和低航速;底部地形扫描要求较大的覆盖、稳定的数据量,在尽可能高的航速情况下要求数据要求稳定,可以接受适度的干扰;目标搜探与底部扫描一起的联合应用综合考虑上述两种情况进行设置;测试水深状况包括底部处于阵列的远场范围或近场范围;测试地形变换状况为水深变化情况;底部材质状况包括淤泥、泥沙、石头、水泥底;水文状况包括水体清澈、浑浊、淡水、咸水;
声呐控制参数包括:开角设置、ping率设置、脉冲长短设置、发射功率设置、发射波束角度设置、近场聚焦、探测模式设置、接受增益设置、图像显示设置。更进一步的技术方案是所述步骤(3)中自适应调整的参数包括调整ping率,发射脉宽、发射电压等级、应用的增益、检测门限设置。
更进一步的技术方案是所述步骤(3)中自动迭代模型为一个滑动窗口函数,滑动窗口函数可以具体表示为W(E,C,P),其中W代表滑动窗函数,E为环境变化参数,具体为测试目的,测试水深状况,测试地形变换状况,底部材质状况,水文环境、载体航速;P代表系统表现,具体为水体噪音干扰、旁瓣干扰、边缘杂波、波束触底状况;C代表声呐控制参数,具体为开角设置、ping率设置、脉冲长短设置、发射功率设置、发射波束角度设置、近场聚焦、探测模式设置、接受增益设置、图像显示设置。
工作原理:多波束声呐在实际使用过程中,需要对声呐系统的实时控制参数进行实时调整;在多波束系统设计完成之后,每一套多波束声呐系统都具备自己的分辨率模型;同时根据声呐方程、声呐安装载体的实时运动姿态、声呐系统的实时测试表现,通过算法可推算出多波束声呐在当前测试环境下所需要的实时控制参数、参数调整控制原则;软件算法可以自动实时的判断出在当前测试环境下,多波束声呐系统的实时表现以及测试效果;那么算法可以综合上述关系实现声呐系统的自适应调整控制,通过该调整可以减轻操作人员的工作量,降低实时数据传输量,为多波束声呐系统与ROV/UUV以及其他水下系统集成提供了可靠保证。
与现有技术相比,本发明的有益效果是:综合产品的应用场景、载体的运动状态、应用水文环境等,在系统实际应用中,软件算法自动调整控制多波束声呐的系统参数,排除非专业操作人员、参数需要实时动态调整设置、参数设置存在滞后等因素的影响,取得良好测试效果。同时通过该方法也可以实现多波束声呐系统与ROV/UUV以及其他水下系统集成,为多波束声呐系统应用于无人水下装备提供保证。
附图说明
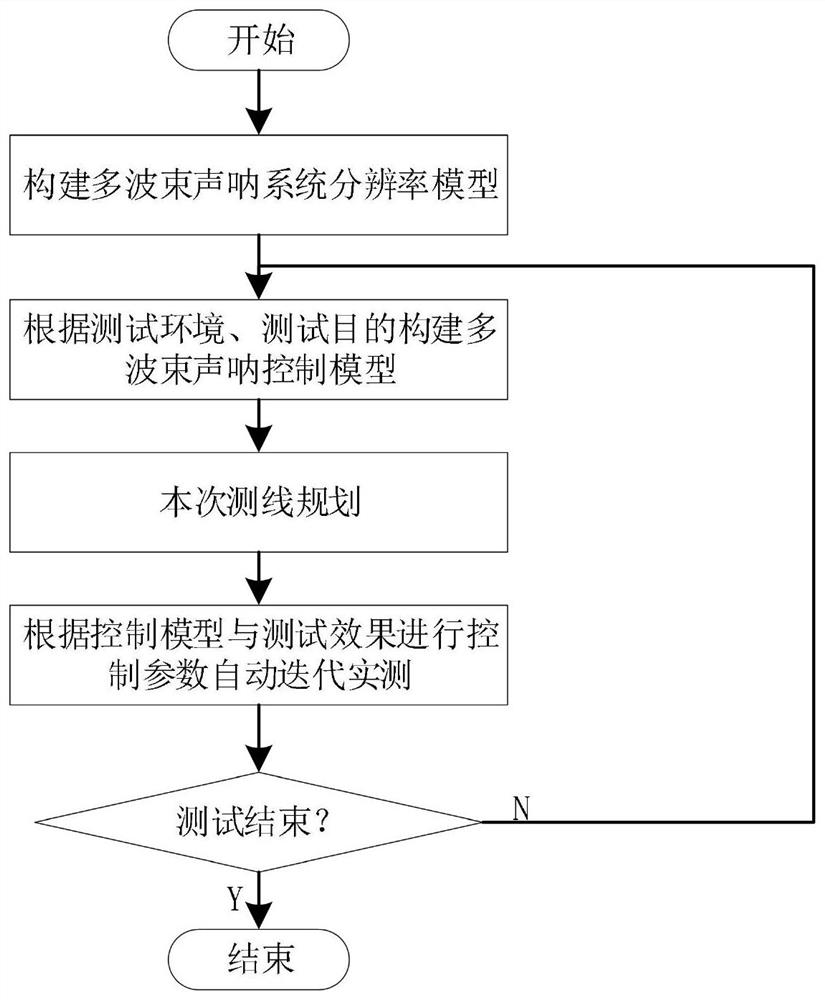
图1为本发明的流程图。
图2为本发明中迭代模型流程图。
图3为本发明自动规划测线与人工规划测线曲线图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
本方法的实现步骤为:
步骤1:根据多波束声呐系统的空间分辨率模型,得到波束在一定水深状况下底部覆盖的数据,包括一定角度下平行航向长度、垂直航迹方向长度。
波束分辨率模型为Br(H,θ)={Lrθ,Wrθ,Rrθ},其中H是深度,θ是波束角度,在深度为H,开角为θ情况下,Lrθ为在一定角度下系统平行于航迹方向的长度分辨率,Wrθ为在一定角度下系统垂直于航迹方向的宽度分辨率,Rrθ为在一定角度下系统的距离分辨率;在已知水深、开角、多波束声呐系统工作脉冲长短,上述参数均可计算得出;得到的多波束声呐分辨率矩阵具体为:
上式中k代表的多波束声呐所实用的深度值序号,例如多波束系统最深可应用水深范围为300米,那么可以1米深度变化为依据,k的取值为1-300。上式中n代表多波束系统对应某一个波束的波束角度,例如多波束系统的波束数量为501,那么θ500代表的是系统的第501个波束的波束角度。多波束系统的架构确定之后,上述分辨率识别矩阵即可通过计算得到,因此分辨率识别矩阵为已知数据,可以提前计算好存储与程序之中,通过查表即可得到。
步骤2:根据测试目的(地形扫描、目标搜探、联合应用)、测试水深状况(最浅水深状况、最大水深状况)、测试水下地形变化状况(水下平坦、沟壑起伏、凸起下沉),测试水下底部材质(沙石、淤泥、水草),测试水域水文环境(水体浑浊还是清澈、咸水、淡水),在测试过程中声呐载体的最大航速,水面天气状况(浪大还是浪小、入水深度),载体振动以及噪音情况等构建出多波束操作系统进行测试的基本控制模型,基本控制模型包括具体是多波束声呐系统的开角(发射开角、接收开角)设置、ping率设置、脉冲长短设置、发射功率设置、发射波束角度设置、近场聚焦设置(间接设置系统工作角度、深度、功率等)、探测模式设置(扫底、目标搜探、联合应用),以及根据测试目的坐标进行初始测线规划(初始测线一般为多波束声呐载体所控制生产)。
多波束声呐的基本控制模型可用如下函数表示:
声呐基本控制模型=F(测试环境参数,声呐控制参数)
测试环境参数包括:测试目的,测试水深状况,测试地形变换状况,底部材质状况,水文环境等。测试目的中主要有目标搜探、底部扫描以及目标搜探与底部扫描一起的联合应用三种情况,目标搜探过程中要求具备较高的分辨率(合适的设置阵列孔径以在不同水深状况下取得最佳的角度分辨率)、较少的干扰(少边缘杂波、少水体噪音)、较多的数据量(高的ping率、低航速);底部地形扫描要求较大的覆盖、稳定的数据量(在尽可能高的航速情况下要求数据要求稳定,可以接受适度的干扰);目标搜探与底部扫描一起的联合应用应该综合考虑上述两种情况进行设置;测试水深状况(底部是否处于阵列的远场范围、近场范围),测试地形变化(某一测测试时包括即有水深变化是否剧烈是否存在深度即在近场区域、也存在远场区域等);底部材质状况(底部材质是淤泥、泥沙、石头、水泥底);水文状况包括(水体清澈、浑浊、淡水、咸水等);上述参数确定之后即可确定多波束声呐系统参数设置的基本方向。
声呐控制参数包括:开角(发射开角、接收开角)设置、ping率设置、脉冲长短设置、发射功率设置、发射波束角度设置、近场聚焦、探测模式设置(扫底、目标搜探、联合应用)、接受增益设置、图像显示设置(测试人员只需要观看测试效果不需要实时操控多波束声呐系统)等。
测试目的包括底部扫测、目标搜探、底部扫测与目标搜探联合应用,底部扫测应用声呐需要保证覆盖率、测试效率、测试效果;目标搜探需要保证声呐信号尽可能的多的照射到目标,获取较多的数据点,同时也要保证目标反射的信号强度,但是信号强度又不能过强,防止引入干扰;如果是底部扫测与目标搜探的联合应用,那么需要在上述两种情对覆盖率、测试效率、测试效果、目标反射的信号强度、目标数据量之前综合考虑。
A、根据测试水深状况,查表可知道声呐在该水深状况下分辨率状况。
B、根据测试水域水文环境(水体浑浊还是清澈、咸水、淡水),可以确定出声波在水中传输的衰减系数,根据声呐方程,即可得到需要实际测量所需要的最小声能量。
C、上述计算只能反映出多波束声呐系统完成某一次测试时需要的理论能量,测试水下底部材质(沙石、淤泥、水草等),都会影响多波束声呐系统实测表现效果,因此系统会根据底部材质与声信号实测情况,对上一步确定的所需要的最小声能量,由发射功率设置、接收增益设置两个方面综合考虑,形成对应设置关系。
D、根据底部地形变化情况可以确定出在某一次测试时的最远声程,通过此即可确定出系统在本次测试过程中支持的ping率。
E、水面天气状况(浪大还是浪小、声呐头入水深度)在一定程度上决定了声呐系统在实测中的受干扰状况,这些都会间接的多波束声呐系统的参数设置。
F、多波束声呐头需要安装在载体上,载体的振动、载体的传导噪音,都会对系统进行干扰,通过对噪音的分析,也会决定多波束系统的参数设置。
步骤3:根据步骤2生成的多波束声呐的基本控制模型,根据多波束声呐系统在测试过程声呐的运动姿态信息(横摇、纵摇、升沉、航速)、系统测试干扰状况(隧道效应状况、受水面干扰是状况、载体干扰状况)、系统整体图像状况(边缘成像效果),根据多波束声呐原理对测试过程中的多波束声呐控制参数进行自动迭代控制参数,整个自适应迭代模型为一个滑动窗口函数,滑动窗口函数可以具体表示为W(E,C,P),其中W代表滑动窗函数,E为环境变化参数,主要包括步骤2所述参数,P代表系统表现;根据实现测试效率最优原则,具体在保证开角前提下保证边缘波束有效触底,降低旁瓣干扰,保证成像质量,降低功耗;根据本发明整个声呐系统将在整个测试过程中实现声呐系统控制参数自动迭代完成整个测试过程。在一定水文环境情况下(水深在一定范围、淡水、咸水、水体浑浊、清澈等),根据声呐方程、分辨率模型等是可知道多波束声呐系统完成测试所需要的一些基本参数设置范围,因此在本步骤中所述的声呐系统的控制参数的自动迭代控制并不会过度设置导致系统无法正常使用。
步骤4:根据步骤3进行多波束声呐基本控制模型迭代过程中将会实时记录多波束声呐的载体运动轨迹曲线,以及多波束声呐系统底部测宽覆盖曲线,多波束声呐系统将根据应用目的(目标搜探、底部扫描)确定相邻测线覆盖要求(相邻测线间一般具有10%覆盖,相邻测线覆盖率)自动规划下一条测线;如果系统需要在同一个区域内完整覆盖测量,多波束声呐系统将实时反馈本系统规划轨迹曲线给载体,载体可以选择性采用多波束声呐系统规划测线进行测量;假设水面状况良好无障碍,由于水下底部地形的不确定,因此多波束系统在自动实测过程中为了提高测试效率载体按照多波束系统测试后生产的测线进行自动完成测量将会是最高效的。
自动测线规划规划测线为根据初始实测测线动态规划测线,因此即使在使用过程中首次规划测线为直线,但是由于水下底部为非平整底部,造成了实测得底部覆盖区域为非规则区域,因此系统自动规划测线一定是曲线形状测线,造成系统实测测试花费时间与理论规划测试时间有一定差别,但是理论规划测线仍然可以用于预估整个系统实测用时;同时由于多波束声呐系统处于水下,对水面障碍、地形变化等是未知的,因此多波束声呐系统自动规划测线反馈给载体之后,载体也将将根据水域状况进行人为控制,避免触礁、撞船等,相应的多波束声呐也将会根据实测航迹进行测线自动规划,并反馈给载体。
步骤5:根据步骤4描述的自动测线规划为要求进行某一个测试区域的全区域覆盖测试,如果测试目不要求对某一个测试区域进行全区域覆盖测试,那么测试时多波束声呐生成的自动规划测线反馈给载体后载体可以不采用,多波束声呐行进测线直接根据步骤3中根据测试目的进行初始测线规划(初始测线一般为多波束声呐载体所控制生产,也可以用户设置初始坐标,多波束声呐系统根据给定坐标由多波束声呐系统自动生成初始测线反馈给载体)的测线进行整个测试。
参与测试的多波束声呐系统设计角度分辨率为0.1°*0.39°,系统最大开角为120°,距离分辨率为2.5cm,支持脉冲长度范围为8个脉冲周期至40个脉冲周期,近远场分界距离为40米,系统波束数量为1200个,该多波束声呐系统支持通过改变阵列孔径实现近场聚焦设置,支持近场聚焦范围为3.6米至40米;通过上述关系系统已经计算并存储出了该波束声呐系统的分辨率模型,分辨率模型按照0.5米深度变化取值计算保存。
该多波束声呐系统参与某一次测试时,测试目的为水下地形扫描,测试水域为3级湖况,测试水深变化范围是20米至160米,测试水域水质为淡水,测试水况清澈,测试水底为泥沙底,水草较少,测试区域水面空旷,但是底部不平整,多凸起等,该多波束声呐安装载体为长30米,宽8米的双体船,航速范围2-10节,多波束声呐安装于载体月池部位,声呐入水2米,该多波束声呐系统配套有GPS系统提供位置以及导航信息,配套有MRU设备提供其姿态信息。
测试时该多波束声呐系统初始测线由载体提供,待初次测线完成测试之后,多波束声呐系统生成规划测线,此时载体驾驶人员按照多波束声呐系统提供测线继续后面测试,直到整个测试区域完成测试。
根据测试目的可知,本次测试是目的是水下地形扫描,那么要求保证数据质量的前提下保证测试效率,那么多波束声呐系统控制要求为适当ping率,保证大开角,高航速测试。那么测试时刚开始控制载体航速为6节,系统开角使用120°。
刚开始多波束声呐系统根据自身初始测试得到的水深信息查表得到分辨率模型,通过当前水深选择最适合的分辨率(近场聚焦),根据分辨率要求选择合适的阵列孔径;根据输入水况信息选择合适的声波传输衰减值;根据水深与阵列孔径设置最远声程状况下系统支持的最大ping率设置范围;根据声呐方程确定出实现该水深与最远声程状况下,可知系统发射使用的合适功率范围;然后设置一个中等偏小的接收增益,根据深度信息设置合适的图像显示参数。
多波束系统开始工作之后,首先多波束系统根据参数设置自动判断该种安装(月池)、该种航速下图像质量否可用,具体为安装杆抖动、载体振动、水下气泡、载体在该种航速下运动姿态是否影响系统的有效底成形(可以有效的判断),成形数据质量(数据错误、丢失),如果系统可以正常使用,那么多波束声呐将反馈给载体可以继续进行测试的信号;如果系统存在有效底判断错误,或者成型图像质量较差,那么将反馈给载体抖动过大,降低载体速度或者改进安装工装。
载体航速、安装满足前提下,多波束声呐系统通过成型之后的数据判断在当前开角状况下,边缘是否有效触底;Nadir(最低点位置)是否出现打穿;设置距离门限内水体中噪音是否明显;边缘噪音是否导致底部失真。如果边缘有效探底、且边缘噪音未导致底部失真,设置距离门限内水体噪音未超过门限,那么当前多波束系统参数设置是合适的,可以继续使用这些控制参数进行迭代。
否则如果边缘未有效触底说明需要增加发射功率,增加发射功率可以使用增加发射电压或者是增加发射脉冲长度实现;如果边缘水体噪音较大,那么说明水面噪音干扰较大,需要缩小系统的开角范围;在扫底状况下距离门限内靠近底部中央部分水体噪音如果较大,说明发射能量过大,那么需要适当较少系统的发射功率或者减少发射脉冲长度,为了保证成像质量适当的增加接收增益;如果在Nadir(最低点位置)出现打穿那么需要减少发射能量,只能是通过减少脉冲长度实现。
在测试过程中,根据初始测线完成测试之后,多波束声呐系统已经确切知道其波束在底部的覆盖范围,假设本次测试设置相邻测线之间覆盖范围要有10%的覆盖要求,那么多波束声呐系统将自动生成测线并传输给载体,载体驾驶方选择性采用。
类似地对于目标搜探应用,目标判别主要采用信号强度变化、深度变化为判别依据,因此需要重点关注水体噪音,防止水体噪音对目标判断造成干扰,同时由于水中目标可能较小,因此需要在低速情况下,尽可能的提高ping率得到较多数据量。多波束声呐系统的其余操控原则与底部扫描类似。
类似地对于目标搜探与底部扫描的联合应用,需要综合考虑上述操作原则,在情况允许的情况下优先考虑目标搜探应用。
尽管这里参照本发明的多个解释性实施例对本发明进行了描述,但是,应该理解,本领域技术人员可以设计出很多其他的修改和实施方式,这些修改和实施方式将落在本申请公开的原则范围和精神之内。更具体地说,在本申请公开、附图和权利要求的范围内,可以对组成部件或布局进行多种变形和改进。除了对组成部件或布局进行的变形和改进外,对于本领域技术人员来说,其他的用途也将是明显的。
- 一种多波束声呐系统参数的自适应调整方法
- 一种基于多尺度模板匹配和自适应颜色筛选的多波束声呐的沉船检测方法