一种根据画线方向规避路段的导航方法
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及信息处理技术领域,具体为一种根据画线方向规避路段的导航方法。
背景技术
当现的路线规划时回避的方案有二种:第一:是回避区域,在地图上描画一个多边形,在路线规划时,根据这个多边形区域,回避多边形内的道路,这个多边形内包括很多道路,不能回避指定的道路;第二:根据道路名称回避道路,需要指定一个道路名称,在路线规划判断道路名称,回避道路名称所对应的道路。
回避区域:只能回避多边形区域内的路线,可能会回避了其他的多余的道路,根据道路名称回避:如果只想回避一条道路上的某段,而不是回避全部的道路时,也会有多余的道路被回避,为此我们提供了一种根据画线方向规避路段的导航方法。
发明内容
本发明的目的在于提供一种根据画线方向规避路段的导航方法,具备只是回避画线的道路,不会回避多余的道路,在道路名称对应的道路上,又精确的回避此道路名称对应道路内的一段道路的优点,解决了回避区域:只能回避多边形区域内的路线,可能会回避了其他的多余的道路,根据道路名称回避:如果只想回避一条道路上的某段,而不是回避全部的道路时,也会有多余道路被回避的问题。
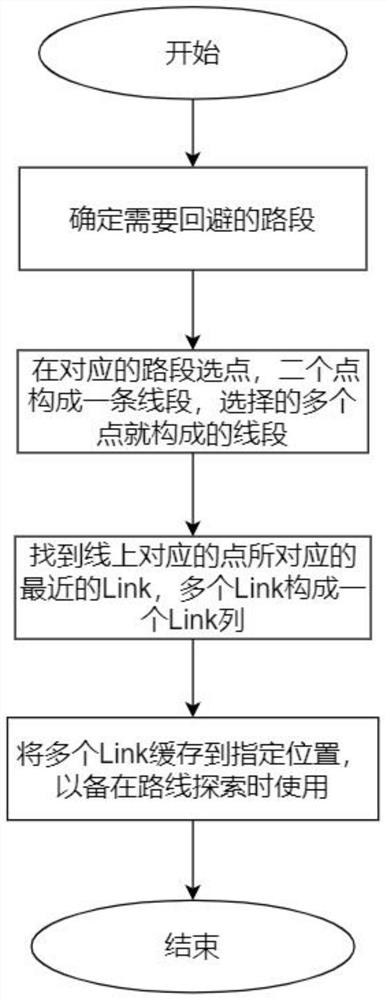
为实现上述目的,本发明提供如下技术方案:一种根据画线方向规避路段的导航方法,包括以下步骤:
步骤一:存在道路AB路段,在AB路段中有5个Link分别为Link1、Link2、Link3、Link4和Link5,通过道路AB的路段,在AB的路段上包括多个Link,分别是Link1、Link2、Link3、Link4和Link5,在线路上标记每个Link的端点;
步骤二:根据步骤一中的路线,计划画线回避AB路线时,需要确定AB路段中的Link,可以进行画线确定精确Link,画线的使用者应沿道路画出计划回避的道路的坐标列,坐标列应该是沿着道路的Link进行顺序排列,根据这一系列的坐标列,可以画出一条沿着道路的线段,画线的点分别为P1、P2、P3、P4和P5,根据各个点可以连接成一条线段,此线段就是画出的规避道路;
步骤三:根据步骤二中画线的坐标点识别对应的Link,要求如下:使用画线点P1找P1最近的Link1,使用画线点P2找到最近的Link2,并且判断Link1与Link2相连接,使用画线点P3找到最近的Link3,并且判断Link2与Link3相连接,使用画线点P4找到最近的Link4,并且判断与Link3相连接,使用画线点P5找到最近的Link5,并且判断与Link4相连接,通过P1、P2、P3、P4和P5分别找到对应的Link是Link1、Link2、Link3、Link4和Link5,可以确定需要回避的Link列数据;
步骤四:将步骤三中确定需要回避的Link列数据Link1、Link2、Link3、Link4和Link5分别放在计算机的缓存中,当路线规划时会从缓存中取得Link数据,判断是否需要回避。
设置好回避Link后,进行路线探索回避的流程,包括以下步骤:
a:通过起点确定Link A;
b:Link A的连接Link是Link1和Link B,需要到回避Link缓存表中查询发现Link1在回避的缓存表中,是需要回避的Link,将Link1的分支删除;
c:用Link B取得连接Link是Link C和Link F,Link F没有其他连接Link,直接删除,然后,需要到回避Link缓存表中查询,发现没有找到Link B,因此Link B保留;
d:用Link C取得连接Link是Link D和Link G,Link G没有其他连接Link,直接删除,需要到回避Link缓存表中查询,发现没有找到Link C,Link C保留;
e:用Link D取得连接Link是Link5和Link E,需要到回避Link缓存表中查询,发现有Link5,进行删除;
f:Link E是终点的Link,探索结束。
优选的,所述步骤f中探索出来的路线是Link A、Link B、Link C、Link D和LinkE,以上是概要描述通过画线的点,找出点所对应的需要回避的Link,在路线探索时,将回避的Link进行丢弃的过程,在使用路线探索的算法时,可使用Dijkstra算法和A*算法。
优选的,所述步骤一中在正常的没有规避路段,进行路线规划的情况,从起点到终点的规划路线,规划出来的从起点到终点的路线。
优选的,所述将线路数据缓冲在计算机数据存储模块中,通过计算机也可以上传至云端数据库,可以对线路进行定时考察并上传数据库,对线路进行定时更新。
与现有技术相比,本发明的有益效果如下:
1、本发明根据沿道路画线,将画出的线段以坐标点形式传入到路线规划,根据坐标点匹配到相对应的道路,将匹配的道路进行标记,路线规划时回避指定的道路后,规划出一条新的路线,改善了只能通过LinkID回避道路的方法,也通过在地图上画线,回避画线所对应的Link,达到回避道路的效果。
2、本发明与回避区域比较,本方案只是回避画线的道路,不会回避多余的道路,与根据道路名称回避比较,本方案在道路名称对应的道路上,又精确的回避此道路名称对应道路内的一段道路。
3、本发明具备只是回避画线的道路,不会回避多余的道路,在道路名称对应的道路上,又精确的回避此道路名称对应道路内的一段道路的优点,解决了回避区域:只能回避多边形区域内的路线,可能会回避了其他的多余的道路,根据道路名称回避:如果只想回避一条道路上的某段,而不是回避全部的道路时,也会有多余道路被回避的问题。
附图说明
图1为本发明表示一段道路上的Link列;
图2为发明起点到终点是正常路线规划时的路线;
图3为发明在道路上进行选点;
图4为发明各个选点对应的Link对应信息;
图5为发明将选择的Link放到缓存中;
图6为发明在路线规划时从缓存中取得相应的Link;
图7为发明路线规划后最终回避选择道路的新路线;
图8为发明选点画线找到回避路段的时序;
图9为发明路线探索时使用回避路段的时序。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
请参阅图1-9,一种根据画线方向规避路段的导航方法,包括以下步骤:
步骤一:存在道路AB路段,在AB路段中有5个Link分别为Link1、Link2、Link3、Link4和Link5,通过道路AB的路段,在AB的路段上包括多个Link,分别是Link1、Link2、Link3、Link4和Link5,在线路上标记每个Link的端点;
步骤二:根据步骤一中的路线,计划画线回避AB路线时,需要确定AB路段中的Link,可以进行画线确定精确Link,画线的使用者应沿道路画出计划回避的道路的坐标列,坐标列应该是沿着道路的Link进行顺序排列,根据这一系列的坐标列,可以画出一条沿着道路的线段,画线的点分别为P1、P2、P3、P4和P5,根据各个点可以连接成一条线段,此线段就是画出的规避道路;
步骤三:根据步骤二中画线的坐标点识别对应的Link,要求如下:使用画线点P1找P1最近的Link1,使用画线点P2找到最近的Link2,并且判断Link1与Link2相连接,使用画线点P3找到最近的Link3,并且判断Link2与Link3相连接,使用画线点P4找到最近的Link4,并且判断与Link3相连接,使用画线点P5找到最近的Link5,并且判断与Link4相连接,通过P1、P2、P3、P4和P5分别找到对应的Link是Link1、Link2、Link3、Link4和Link5,可以确定需要回避的Link列数据;
步骤四:将步骤三中确定需要回避的Link列数据Link1、Link2、Link3、Link4和Link5分别放在计算机的缓存中,当路线规划时会从缓存中取得Link数据,判断是否需要回避。
设置好回避Link后,进行路线探索回避的流程,包括以下步骤:
a:通过起点确定Link A;
b:Link A的连接Link是Link1和Link B,需要到回避Link缓存表中查询发现Link1在回避的缓存表中,是需要回避的Link,将Link1的分支删除;
c:用Link B取得连接Link是Link C和Link F,Link F没有其他连接Link,直接删除,然后,需要到回避Link缓存表中查询,发现没有找到Link B,因此Link B保留;
d:用Link C取得连接Link是Link D和Link G,Link G没有其他连接Link,直接删除,需要到回避Link缓存表中查询,发现没有找到Link C,Link C保留;
e:用Link D取得连接Link是Link5和Link E,需要到回避Link缓存表中查询,发现有Link5,进行删除;
f:Link E是终点的Link,探索结束。
步骤f中探索出来的路线是Link A、Link B、Link C、Link D和Link E,以上是概要描述通过画线的点,找出点所对应的需要回避的Link,在路线探索时,将回避的Link进行丢弃的过程,在使用路线探索的算法时,可使用Dijkstra算法和A*算法。
步骤一中在正常的没有规避路段,进行路线规划的情况,从起点到终点的规划路线,规划出来的从起点到终点的路线。
将线路数据缓冲在计算机数据存储模块中,通过计算机也可以上传至云端数据库,可以对线路进行定时考察并上传数据库,对线路进行定时更新。
实施例一:
一:通过点抓取最近的Link作为回避Link
在路网中选一个点,抓取它最近的Link方法:由于全国的路网的Link非常多,提高抓取Link效率的方法如下:将全国路网用网格进行切分,每个格位置用左下,右上的坐标进行标注,切会后会生成若干个大小相同的格子,将路网上的所有Link按格子进行保存,这样就把全国的Link细分到每个格子内,每个格子的Link数量就会变少,在抓取点最近的Link时,首先确定点在那一个格子内,然后,在从这个格子内查找到与这个点最近的Link,这样就不会从全国范围内查找Link,会大大提高查找Link的效率。
确定想要画线回避一条路AB,在AB路包含多条Link,沿AB的路上画一些点,每一个点都能找到它所对应的最近的Link,在第一个点找到最近的Link是Link1,在第二个点找到最近的Link是Link2,在第三个点找到最近的Link是Link3,在第四个点找到到最近的Link是Link4,在第5个点找到最近的Link是Link5,并且判断Link1,Link2,Link3,Link4,Link5是否想连接,如果不连接,抛弃不连接的部分,并且,将相连接的Link分别保存在回避Link的缓存中。
二:路线探索时过滤回避Link
步骤一:初始化算路的始点和终点,抓取始点的最近的Link A,抓取终点的最近的LinkE;
步骤二:使用始点最近的Link进行探索,始点的Link的连接Link是Link1、Link B、和Link H,首先,判断是否探索到了终点:判断Link1与终点的LinkE不同,没有到终点,判断LinkB与终点的LinkE不同,没有到终点,判断LinkB与终点的LinkE不同,没有到终点,其次,判断连接Link是否在在回避的Link列中,判断连接Link1在回避的Link列内,说明Link1不能再参与路线探索,需要把Link1从探索的连接中删除掉,Link1不在参与路线探索,LinkB和LinkH可以继续进行探索,并将LinkA标记为已探索完成为(*);
步骤三:将LinkB与LinkH放到探索的队列时,这时探索队列中有LinkH,LinkB,LinkA(*);
步骤四:从探索的队列中取得一个LinkH,取得LinkH的连接Link,发现LinkH没有连接Link,把LinkH删除掉,这时,探索队列中有LinkB,LinkA(*);
步骤五:从探索的队列中取得LinkB,取得LinkB的连接Link,分别是LinkF和LinkC,判断LinkF和LinkC都不在回避的Link列内,将LinkF,LinkC放到探索的队列中,将LinkB标记为已探索,这时探索队列有LinkF,LinkC,LinkB(*),LinkA(*);
步骤六:从探索队列中取得LinkF,LinkF没有连接Link,删除掉,这时探索队列有LinkC,LinkB(*),LinkA(*);
步骤七:从探索队列中取得LinkC,连接Link为LinkG,LinkD,判断LinkG和LinkD都不在回避队列中,也没有到达终点LinkE,将LinkG,LinkD放到探索队列中,并将LinkC标记为已探索,这时探索队列中有LinkG,LinkD,LinkC(*),LinkB(*),LinkA(*);
步骤八:从探索队列中取得LinkG,它没有连接Link,删除掉,这时探索队列中有LinkD,LinkC(*),LinkB(*),LinkA(*);
步骤九:从探索队列中取得LinkD,它的连接Link是Link5和LinkE,判断LinkE是终点的Link,说明已经到达终点,将LinkD,LinkE放到探索队列中,并将LinkD,LinkE标志为已探索,这时探索队列中有LinkE(*),LinkD(*),LinkC(*),LinkB(*),LinkA(*);
从始点到终点的探索的路线为LinkA,LinkB,LinkC,LinkD,LinkE。
通过以上步骤,画线的回避Link在路线探索时都进行了删除,探索后,新生成的路线中不包括回避道路。
综上所述:该根据画线方向规避路段的导航方法,解决了回避区域:只能回避多边形区域内的路线,可能会回避了其他的多余的道路,根据道路名称回避:如果只想回避一条道路上的某段,而不是回避全部的道路时,也会有多余道路被回避的问题。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种根据画线方向规避路段的导航方法
- 规避路段的导航方法和装置