车辆的替代制动装置
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及使用齿轮式自动变速器进行替代制动的车辆的替代制动装置。
背景技术
在汽车等车辆的领域中,不仅有自动驾驶、驾驶辅助那样的有人的自动行驶,还包括在乘员已从车辆下车的状态下进行的远程驻车、自动代客驻车那样的无人的自动行驶。例如,在下述的专利文献1中,记载了远程驻车的发明。
在自动行驶中,通过根据需要自动地控制车辆的加速减速来自动地控制车速,通过自动地控制方向盘的转向角来自动地控制车辆的行进方向。尤其,在需要通过自动行驶进行制动时,经由制动控制装置自动地控制制动装置,来向车轮赋予必要的制动力,使车辆自动地减速并停止。
专利文献1:日本特开2018-199368号公报
发明内容
在进行自动行驶的车辆中,如果制动控制装置和/或制动装置发生异常,无法向车轮赋予必要的制动力,则即使需要通过自动行驶进行制动,也无法自动地使车辆减速并停止。在有人的自动行驶的情况下,能够通过驾驶员操作驻车制动器装置等非常措施来使车辆停止,但在无人的自动行驶的情况下,由于驾驶员已下车,因此期望能够通过替代制动来使车辆停止。
另外,考虑通过将制动控制装置及制动装置以双重系统的形式构成,在一个系统故障时,通过另一个系统使车辆减速并停止。但是,如果将制动控制装置及制动装置以双重系统的形式构成,则车辆的构造复杂化,无法避免车辆的成本升高。
然而,在搭载有内置离合器及制动器的齿轮式自动变速器的车辆中,能够通过对离合器及制动器的控制进行设计来将自动变速器的输出轴进行制动。由此,在制动控制装置和/或制动装置发生异常时,通过控制离合器及制动器从而将自动变速器的输出轴制动,无需将制动控制装置及制动装置以双重系统的形式构成,能够有效地利用自动变速器来进行替代制动。另外,不仅在进行有人的自动行驶的车辆和进行无人的自动行驶的车辆中、而且在不进行自动行驶而是通过驾驶员的驾驶操作来行驶的车辆中,都能够进行该替代制动。
本发明的主要的课题是提供一种车辆的替代制动装置,其构成为,在制动控制装置和/或制动装置发生了异常时,能够有效地利用内置有离合器及制动器的齿轮式自动变速器进行替代制动。
根据本发明,提供一种车辆(14)的替代制动装置(10),该替代制动装置(10)具有:齿轮式自动变速器(12),具有使齿轮(28、30等)的啮合情形变化的至少一个离合器(C11、C12等)及至少一个制动器(B11、B12等);以及控制装置(16),构成为通过控制离合器及制动器来切换自动变速器的变速档。
控制装置(16)构成为,在判定为需要车辆制动但车辆的制动装置(22)无法正常地向车轮(64L、64R等)赋予制动力时,进行替代制动,在该替代制动中,控制离合器及制动器从而通过制动器的制动力来将自动变速器的输出轴(57、110等)制动。
根据上述的构成,在判定为车辆的行驶期间需要车辆制动但车辆的制动装置无法正常地向车轮赋予制动力时,进行替代制动,在该替代制动中,控制离合器及制动器从而通过自动变速器的制动器的制动力来将自动变速器的输出轴制动。
由此,能够有效地利用内置有离合器及制动器的齿轮式自动变速器进行替代制动,即使在车辆的制动装置无法正常地向车轮赋予制动力的状况下,也能够使车辆减速并停止。另外,由于无需将制动控制装置及制动装置以双重系统的形式构成,因此能够避免车辆的构造的复杂化及车辆的高成本化。
{发明的方式}
在本发明的一个方式中,进行替代制动时的离合器及制动器的控制情形不同于不进行替代制动而车辆(14)行驶时的离合器及制动器的控制情形。
根据上述方式,进行替代制动时的离合器及制动器的控制不会对不进行替代制动而车辆行驶时的离合器及制动器的控制造成影响。因此,能够避免用于进行替代制动的、离合器及制动器的控制对不进行替代制动而车辆行驶时的自动变速器的变速档的控制造成影响。
在本发明的另一方式中,车辆(14)构成为进行自动行驶的控制,控制装置(16)构成为,在判定为自动行驶的控制期间需要车辆制动但车辆的制动装置(22)无法正常地向车轮赋予制动力时,进行替代制动。
根据上述方式,在判定为自动行驶的控制期间需要车辆制动但车辆的制动装置无法正常地向车轮赋予制动力时,能够通过替代制动使车辆减速并停止。
此外,在本发明的另一方式中,自动行驶是无人的远程驻车的自动行驶、无人的自动代客驻车的自动行驶、有人的驾驶辅助的自动行驶及有人的自动驾驶的自动行驶中的任意一种自动行驶。
根据上述方式,在进行无人的远程驻车的自动行驶、无人的自动代客驻车的自动行驶、有人的驾驶辅助的自动行驶或有人的自动驾驶的自动行驶的状况下,在判定为车辆的制动装置无法正常地向车轮赋予制动力时,能够通过替代制动使车辆减速并停止。
此外,在本发明的另一个方式中,控制装置(16)构成为,在判定为驾驶员驾驶车辆(14)的期间需要车辆制动但车辆的制动装置(22)无法正常地向车轮赋予制动力时,进行替代制动。
根据上述方式,在判定为驾驶员驾驶车辆的期间需要车辆制动但车辆的制动装置无法正常地向车轮赋予制动力时,能够通过替代制动使车辆减速并停止。
此外,在本发明的另一个方式中,控制装置(16)构成为,控制离合器及制动器,通过制动器的制动力将自动变速器(12)的输出轴(57、110等)制动并且不进行通过制动器的制动力将自动变速器的输入轴(32、82等)制动。
根据上述方式,在进行替代制动时,不仅能够通过制动器的制动力来将自动变速器的输出轴制动,还能够避免通过制动器的制动力将自动变速器的输入轴制动。由此,在进行替代制动时输入轴也能够自由旋转,因此能够避免抵抗力矩施加于发动机那样的驱动装置以及由此引起的驱动装置堵转(stall)。
另外,在本申请中,“切换变速档”的概念不仅包括切换变速比,而且包括如前进后退的切换那样与换挡位置的变化对应地使齿轮的啮合情形变化的情况。
在上述说明中,为了便于理解本发明,针对与后述的实施方式对应的发明的构成,对在该实施方式中使用的标号添加括号。但是,本发明的各构成要素不限于由与添加了括号的标号对应的实施方式的构成要素限定的内容。通过对参照以下的附图而记载的本发明的实施方式的说明,能够容易理解本发明的其他的目的、其他的特征及带来的优点。
附图说明
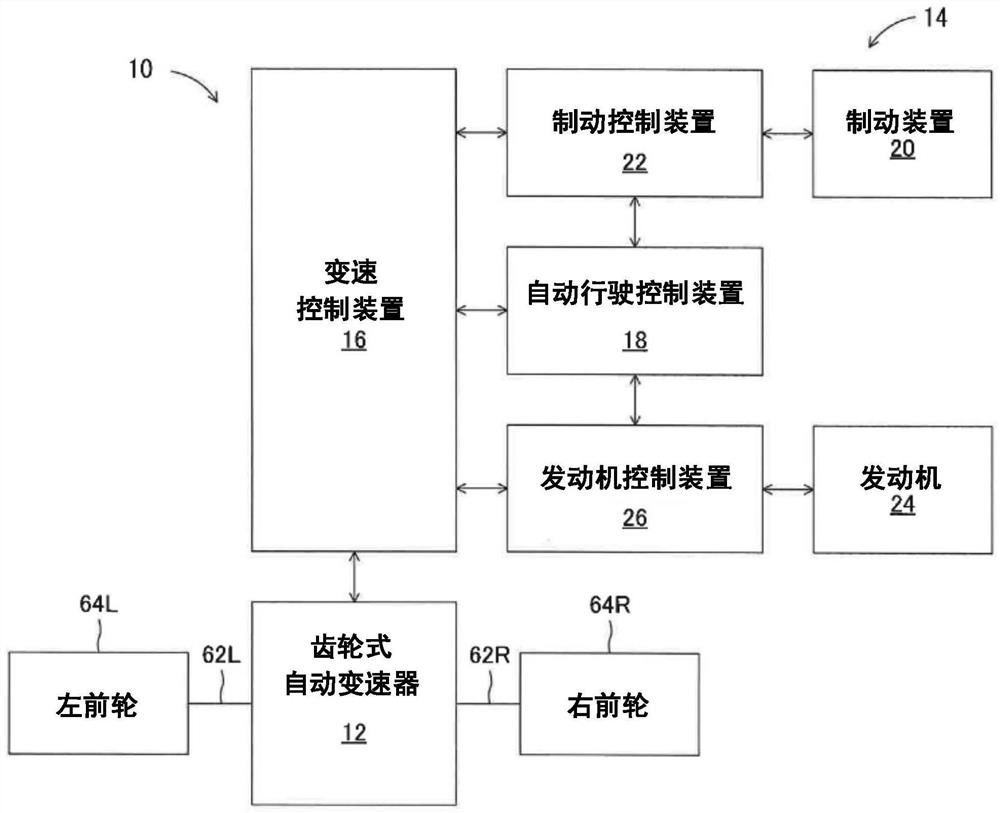
图1是包括本发明所涉及的车辆的替代制动装置的第1实施方式的控制框图。
图2是示出作为前轮驱动车用的8速自动变速器而构成的第1实施方式的替代制动装置的齿轮式自动变速器的说明图。
图3是示出第1实施方式中的包括替代制动控制的变速控制例程的流程图。
图4是示出作为后轮驱动车用的10速自动变速器而构成的第2实施方式的替代制动装置的齿轮式自动变速器的说明图。
图5是示出作为具备无级变速器的前轮驱动车用的齿轮式自动变速器而构成的第3实施方式的替代制动装置的齿轮式自动变速器的说明图。
图6是示出作为具备起动齿轮及无级变速器的前轮驱动车用的齿轮式自动变速器而构成的第4实施方式的替代制动装置的齿轮式自动变速器的说明图。
图7是包括本发明所涉及的车辆的替代制动装置的第5实施方式的控制框图。
图8是示出第5实施方式中的包括替代制动控制的变速控制例程的流程图。
具体实施方式
参照以下附图,对本发明的实施方式详细地进行说明。
[第1实施方式]
如图1所示,第1实施方式所涉及的替代制动装置10应用于具备齿轮式自动变速器12的车辆14,包括控制自动变速器12的变速控制装置16。车辆14还具备控制如自动驾驶那样的自动行驶的自动行驶控制装置18、向车辆14赋予制动力的制动装置20、以及控制制动装置的制动控制装置22。
变速控制装置16如下面详细说明的那样控制自动变速器12的变速档。自动行驶控制装置18根据需要向变速控制装置16、控制作为驱动装置起作用的发动机24的发动机控制装置26、及制动控制装置22输出控制指令,控制自动行驶中的车辆14的加速减速及停止。虽然并未在图1中示出,但自动行驶控制装置18还根据需要向控制方向盘的转向角的转向控制装置输出控制指令。
另外,自动行驶可以是不依赖驾驶员驾驶的、在本技术领域中公知的任意的自动的行驶。例如,自动行驶可以是无人的远程驻车的自动行驶、无人的自动代客驻车的自动行驶、有人的驾驶辅助的自动行驶及有人的自动驾驶的自动行驶中的任意一种自动行驶。
制动控制装置22通过控制向各车轮赋予制动力的制动装置20来使车辆14减速并停止。此外,制动控制装置22自我诊断无法正常地向车轮赋予制动力的异常是否在制动装置20和/或制动控制装置22中产生。
虽然在图1及图2中并未示出,但变速控制装置16、自动行驶控制装置18、制动控制装置22、发动机控制装置26、及转向角控制装置各自包括微型计算机,该微型计算机具有CPU、ROM、RAM及输入输出端口装置,这些部件通过双向的公共总线彼此连接。上述控制装置通过CAN等彼此连接,根据需要通过通信来彼此进行信息的接收/发送。
如图2所示,第1实施方式中的自动变速器12是具有从前进1速至8速的变速档和后退1档的前轮驱动车用的8速自动变速器,包括前行星齿轮装置28及后行星齿轮装置30。行星齿轮装置28及30是双小齿轮式的行星齿轮装置。
前行星齿轮装置28包括与输入轴32一体地连结的前太阳齿轮34、与前太阳齿轮34啮合的内小齿轮36、与内小齿轮36啮合的外小齿轮38、及与外小齿轮38啮合的前行星齿圈40。输入轴32在图2示出的右端部经由简略地图示的变矩器41与发动机24的输出轴连结,接受来自发动机的驱动扭矩。
后行星齿轮装置30包括与中间轴42一体地连结的后太阳齿轮44、与后太阳齿轮44啮合的短小齿轮46、与短小齿轮46啮合的长小齿轮48、及与长小齿轮48啮合的后行星齿圈50。长小齿轮48从后行星齿轮装置30向前行星齿轮装置28侧凸出并延伸。
在中间轴42上,接近后行星齿轮装置30而一体地连结有中间太阳齿轮52,中间太阳齿轮52与长小齿轮48啮合。此外,在中间太阳齿轮52与前行星齿轮装置28之间的位置处,副驱动齿轮(counter drive gear)54与中间轴42一体地连结。输入轴32及中间轴42彼此能够相对旋转。
副驱动齿轮54与副从动齿轮(counter driven gear)56啮合。副从动齿轮56通过输出轴57与差动驱动小齿轮58一体地连结,差动驱动小齿轮58与差动齿圈60啮合。如图1所示,差动驱动小齿轮58及差动齿圈60经由驱动轴62L及62R向作为驱动轮的左右前轮64L及64R传递驱动扭矩。
在图2中,C11是No.1离合器,根据需要将前行星齿圈40与后太阳齿轮44连接。C12是No.2离合器,根据需要将中间轴42与后行星架66连接。C13是No.3离合器,根据需要将前行星齿圈40与中间太阳齿轮52连接。此外,C14是No.4离合器,根据需要将前行星架68与中间太阳齿轮52连接。
此外,B11是No.1制动器,根据需要向中间太阳齿轮52赋予制动力来锁止。B12是No.2制动器,根据需要向后行星架66赋予制动力来锁止。虽然图2未图示,但离合器C11~C14进行的连接及连接解除由变速控制装置16控制。同样地,制动器B11及B12进行的锁止及锁止解除由变速控制装置16控制。
另外,用于使制动器B11及B12工作的制动压力发生装置(未图示)是独立于制动装置20的高压发生装置(未图示)之外的装置。由此,即使后者的高压发生装置发生了异常,制动器B11及B12也能够工作,能够赋予必要的制动力。
变速控制装置16通过控制离合器C11~C14及制动器B11及B12,在通常时如下述的表1所示那样切换变速档。另外,在表1中,○及×分别表示离合器C11~C14各自的连接及连接解除,分别表示制动器B11及B12各自的锁止及锁止解除。此外,在表1中,P、R、N、D及M分别意味着驻车、倒车、空档、前进及手动的换挡位置。这些情况在后述的第2实施方式的表2中也同样。
[表1]
<替代制动控制>
在自动行驶期间需要进行使车辆14减速并停止的制动,但制动装置20和/或制动控制装置22发生了异常从而制动装置无法正常地向车轮赋予制动力时,变速控制装置16使用自动变速器12进行替代制动控制。该情况在后述的第2至第4实施方式中也同样。
在第1实施方式的替代制动控制中,在离合器C11~C14被释放的状态、即连接被解除的状态下,制动器B11及B12工作。另外,替代制动控制中的离合器C11~C14及制动器B11及B12的控制情形,是上述表1所示的自动变速器12的通常的变速档的控制、即未进行替代制动控制时的变速档的控制中的离合器C11~C14及制动器B11及B12的控制情形中未包含的控制情形。
通过制动器B11工作,从而中间太阳齿轮52被制动,通过制动器B12工作从而后行星架66被固定,后太阳齿轮44被制动。由此,中间轴42被制动,其制动扭矩经由副驱动齿轮54被向副从动齿轮56传递,由此输出轴57被制动。此外,制动扭矩经由差动驱动小齿轮58、差动齿圈60、驱动轴62L及62R被向左右前轮64L及64R传递,由此左右前轮被制动。
另外,如果制动器B11及B12这两者在高制动压力下工作,则用于防止齿轮锁止的安全阀(relief valve)(未图示)工作。因此,优选制动器B12在高制动压力下工作,制动器B11在低制动压力下工作,以使车辆的减速度成为必要的减速度的方式来调节制动器B11的制动压力。
<变速控制装置进行的变速控制>
接下来,参照图3所示的流程图对第1实施方式中的包括替代制动控制的变速控制例程进行说明。在未图示的点火开关接通时,由变速控制装置16在每当经过规定的时间时重复执行图3所示的流程图的控制。
首先,在步骤10中,基于从自动行驶控制装置18发送的信息,判别是否是处于如远程驻车那样的自动行驶的控制期间。在做出了肯定判别时变速控制进行到步骤30,在做出了否定判别时变速控制进行到步骤20。
在步骤20中,根据驾驶员的驾驶操作及车辆的行驶状况,基于在该技术领域中的公知的要领来进行通常的变速档的控制。即,离合器C11~C14及制动器B11及B12被控制,从而如上述表1所示那样,自动变速器12的变速档被控制。
在步骤30中,基于从制动控制装置22发送的信息,判别制动装置20和/或制动控制装置22是否发生了制动装置20无法正常地向车轮赋予制动力的异常。在做出了否定判别时变速控制进行到步骤50,在做出了肯定判别时变速控制进行到步骤40。
在步骤40中,判别制动是否是必要的。在做出了肯定判别时变速控制进行到步骤60,在做出了否定判别时变速控制进行到步骤50。另外,也可以在判定为下述的条件(1)至(3)中的任意条件成立时,判别为制动是必要的。
(1)基于从自动行驶控制装置18发送的信息,判定通过自动行驶的控制进行制动是必要的。
(2)推定由于制动装置20和/或制动控制装置22的异常而无法正常地向车轮赋予制动力。
(3)无法与制动控制装置22通信,无法确认正常地向车轮赋予制动力的情况。
在步骤50中,基于从自动行驶控制装置18发送的信息,进行为了实现自动行驶而所需的变速档的控制。即,与步骤20同样地,离合器C11~C14及制动器B11及B12被控制,从而如上述表1所示,自动变速器12的变速档被控制。
在步骤60中,进行替代制动控制。即,在离合器C11~C14被释放的状态下,制动器B11及B12工作。由此,如上述那样制动扭矩被向输出轴57传递,进而被向左右前轮64L及64R传递,由此左右前轮被制动,从而车辆14被减速,车辆被根据需要而停止。
另外,在第1实施方式的替代制动控制中,在离合器C11~C14的连接被解除的状态下,制动器B11及B12工作。由此,前太阳齿轮34、内小齿轮36、外小齿轮38及前行星齿圈40不被制动,因此输入轴32不被制动。从而,即使进行替代制动,输入轴32也能自由地旋转,能够避免抵抗力矩施加于发动机24及由此引起的发动机堵转。
此外,输入轴32经由变矩器41与发动机24的输出轴连结,通过变矩器防止高抵抗力矩施加于发动机24,因此该情况也能够避免发动机的堵转。另外,在后述的其他实施方式中也能获得该变矩器在替代制动控制中的作用。
此外,虽然并未图示,但在制动装置20及制动控制装置22正常且正在执行无人的自动行驶控制的状况下,在产生了基于自动行驶控制的制动请求时,制动指令被从自动行驶控制装置18输出到制动控制装置22。由此,制动控制装置22根据制动指令来控制制动装置20,从而向车轮赋予制动力。该情况在后述的其他实施方式中也是同样的。
[第2实施方式]
图4是示出第2实施方式所涉及的替代制动装置的齿轮式自动变速器12的说明图。另外,应用第2实施方式所涉及的替代制动装置的车辆的构成与图1所示的第1实施方式中的车辆的构成相同。该情况在后述的第3及第4实施方式中也是同样的。
第2实施方式的齿轮式自动变速器12是具有从前进1速到10速的变速档和后退1档的后轮驱动车用的10速自动变速器,包括前行星齿轮装置70、中间行星齿轮装置72及后行星齿轮装置74。前行星齿轮装置70是双小齿轮式的行星齿轮装置。
前行星齿轮装置70包括与输入轴82一体地连结的前行星太阳齿轮(小)84、与前行星太阳齿轮(小)84啮合的前行星短小齿轮86、与前行星短小齿轮86啮合的前行星长小齿轮88、及与前行星长小齿轮88啮合的前行星齿圈90。输入轴82在图4示出的左端部经由变矩器41与发动机24的输出轴连结,接受来自发动机的驱动扭矩。
输入轴82在相对于前行星太阳齿轮(小)84位于发动机24的一侧,与前行星太阳齿轮(大)92一体地连结。前行星长小齿轮88从前行星齿圈90向发动机24一侧凸出并延伸,与前行星太阳齿轮(大)92啮合。
中间行星齿轮装置72包括与输入轴82一体地连结的中间/后行星太阳齿轮94、与中间/后行星太阳齿轮94啮合的中间行星小齿轮96、及与中间行星小齿轮96啮合的中间行星齿圈98。中间/后行星太阳齿轮94从相对于中间行星齿轮装置72位于前行星齿轮装置70侧的位置开始延伸至相对于后行星齿轮装置74位于中间行星齿轮装置72相反侧的位置。
后行星齿轮装置74的构成与中间行星齿轮装置72同样,包括中间/后行星太阳齿轮94、与中间/后行星太阳齿轮94啮合的后行星小齿轮100、及与后行星小齿轮100啮合的后行星齿圈102。前行星齿轮装置70的齿轮架104及后行星齿轮装置74的齿轮架106与输入轴82连结,中间行星齿轮装置72的齿轮架108与输出轴110连结。虽然未被图示,但输出轴110经由后差速器及左右驱动轴与作为驱动轮的左右后轮连结。
在图4中,C21是No.1离合器,根据需要将前行星齿圈90与中间/后行星太阳齿轮94连接。C22是No.2离合器,根据需要将前行星太阳齿轮(小)84与中间/后行星太阳齿轮94连接。C23是No.3离合器,根据需要将前行星齿圈90与中间行星齿圈98连接。此外,C24是No.4离合器,根据需要将中间行星齿轮装置72的齿轮架108与后行星齿圈102连接。
另外,在No.3离合器C23处于连接状态时,No.1离合器C21将中间/后行星太阳齿轮94与中间行星齿圈98连接。在No.1离合器C21处于连接状态时,No.2离合器C22将前行星太阳齿轮(小)84与前行星齿圈90连接。此外,在No.1离合器C21处于连接状态时,No.3离合器C23将中间/后行星太阳齿轮94与中间行星齿圈98连接。
此外,B21是No.1制动器,根据需要向前行星太阳齿轮(大)92赋予制动力来锁止。B22是No.2制动器,根据需要向中间行星齿圈98赋予制动力来锁止。另外,在No.3离合器C23处于连接状态时,No.2制动器B22还向前行星齿圈90赋予制动力来锁止。
另外,用于使制动器B21及B22工作的制动压力发生装置(未图示)是独立于制动装置20的高压发生装置(未图示)之外的装置。由此,即使后者的高压发生装置发生了异常,制动器B21及B22也能够工作,能够赋予必要的制动力。
虽然未被图4示出,但与第1实施方式同样地,离合器C21~C24实现的连接及连接解除由变速控制装置16控制。制动器B21及B22实现的锁止及锁止解除也由变速控制装置16控制。
变速控制装置16通过控制离合器C21~C24及制动器B21及B22,在通常时如下述表2所示那样切换变速档。在下述表2中,△意味着离合器的卡合压力逐渐增大。
[表2]
与第1实施方式中的变速控制同样,第2实施方式中的包括替代制动控制的变速控制也依照图3所示的流程图而被执行。另外,该情况在后述的第3及第4实施方式中也是同样。
<替代制动控制>
在第2实施方式中的替代制动控制中,在离合器C21及C23被连接且离合器C22及C24被释放的状态下,仅制动器B22工作。另外,替代制动控制中的离合器C21~C24及制动器B21及B22的控制情形,是上述表2所示的自动变速器12的通常的变速档的控制情形中的离合器C21~C24及制动器B21及B22的控制情形中未包含的控制情形。
在离合器C21及C23被连接且离合器C22及C24被释放的状态下仅制动器B22工作,从而中间行星齿圈98被制动,经由离合器C21而中间/后行星太阳齿轮94被制动。由此,中间行星小齿轮96被制动从而输出轴110被制动,进而经由后差速器及左右驱动轴而左右后轮被制动,由此车辆14被减速,车辆根据需要被停止。
另外,离合器C24不被连接,因此后行星齿圈102及后行星小齿轮100不被制动。此外,制动器B21不工作,因此前行星太阳齿轮(大)92不被制动。由此,与离合器C24也被连接的情况及前行星太阳齿轮(大)92也被制动的情况相比,施加于输入轴82的制动扭矩小。从而,在制动器B22工作时,通过使其制动力逐渐增大,能够使输入轴82的旋转逐渐下降,再加上变矩器41的作用,这个情况也能够减小在替代制动时施加于发动机24的抵抗力矩。
[第3实施方式]
图5是示出第3实施方式所涉及的替代制动装置的齿轮式自动变速器12的说明图。该实施方式的齿轮式自动变速器12是具备无级变速器(CVT:Continuously VariableTransmission)112的前轮驱动车用齿轮式自动变速器,包括行星齿轮装置114。行星齿轮装置114是双小齿轮式的行星齿轮装置。
无级变速器112包括初级带轮116、次级带轮118及卷绕于这些带轮的金属带120。无级变速器112如公知所示,使初级带轮116及次级带轮118的一对圆盘的间隔变化而使两个带轮上的金属带120的卷绕直径变化,从而能够使变速比无级地变化。
行星齿轮装置114包括与中间轴122一体地设置的太阳齿轮124、与太阳齿轮124啮合的内小齿轮126、与内小齿轮126啮合的外小齿轮128、及与外小齿轮128啮合的齿圈130。支承内小齿轮126及外小齿轮128的齿轮架132被前进离合器FC控制经由曲柄136与输入轴138的连结。
输入轴138构成为一端能够与中间轴122连结,另一端经由变矩器41与发动机24的输出轴连结,接受来自发动机的驱动扭矩。另外,在前进离合器FC处于连接状态时,输入轴138被解除了与中间轴122的连结,在前进离合器FC处于连接解除状态时,输入轴138与中间轴122连结。
在行星齿轮装置114的齿圈130的外侧,设置有倒车制动器RB。倒车制动器RB构成为在处于工作状态时向齿圈130赋予制动力。此外,在前进离合器FC处于连接状态时,倒车制动器RB被维持为不向齿圈130赋予制动力的非工作状态,在前进离合器FC处于连接解除状态时,倒车制动器RB被设定为工作状态。前进离合器FC及倒车制动器RB的状态由变速控制装置16控制。
另外,用于使倒车制动器RB工作的制动压力发生装置(未图示)是独立于制动装置20的高压发生装置(未图示)之外的装置。由此,即使后者的高压发生装置发生了异常,倒车制动器RB也能够工作,能够赋予必要的制动力。
初级带轮116的轴140通过曲柄142与齿轮架132连结。减速驱动齿轮146与次级带轮118的轴144一体地设置,减速驱动齿轮146与减速从动齿轮148啮合。减速从动齿轮148通过输出轴149与差动驱动小齿轮150一体地连结,差动驱动小齿轮150与差动齿圈152啮合。如图1所示,差动驱动小齿轮150及差动齿圈152经由驱动轴62L及62R向作为驱动轮的左右前轮64L及64R传递驱动扭矩。
<前进后退的切换>
在车辆14前进时,倒车制动器RB在非工作的状态下与前进离合器FC连接,中间轴122与输入轴138的连结被解除。由此,输入轴138的驱动力经由曲柄136、前进离合器FC、齿轮架132、内小齿轮126、外小齿轮128及曲柄142向初级带轮116的轴140传递。
与之相对,在车辆14后退时,在前进离合器FC的连接被解除的状态下倒车制动器RB工作,中间轴122与输入轴138连结。由此,输入轴138的驱动力经由中间轴122、太阳齿轮124、内小齿轮126、外小齿轮128、齿轮架132及曲柄142向初级带轮116的轴140传递。在该情况下,轴140的旋转方向通过行星齿轮装置114变化为与车辆14前进时的方向相反的方向。
另外,在车辆14前进时及后退时之中的任意情况下,也由变速控制装置16如上述那样使初级带轮116及次级带轮118处的金属带120的卷绕直径变化来进行无级的变速比的控制。
<替代制动控制>
在第3实施方式中的替代制动控制中,前进离合器FC被连接,并且倒车制动器RB工作。前进离合器FC被连接且倒车制动器RB工作的控制情形,与车辆14前进时及后退时的前进离合器FC及倒车制动器RB的控制情形不同。
前进离合器FC被连接且倒车制动器RB工作,从而齿圈130被制动,内小齿轮126、外小齿轮128及齿轮架132被制动。该制动扭矩通过曲柄142向初级带轮116的轴140传递,经过初级带轮116、金属带120、次级带轮118、轴144向减速驱动齿轮146传递。
此外,制动扭矩经过减速驱动齿轮146及减速从动齿轮148向输出轴149传递,输出轴被制动。此外,制动扭矩经过差动驱动小齿轮150、差动齿圈152向左右驱动轴62L及62R传递。由此,左右前轮64L及64R被制动,由此车辆14被减速,车辆根据需要被停止。
另外,支承内小齿轮126及外小齿轮128的齿轮架132由前进离合器FC经由曲柄136与输入轴138连结。由此,输入轴138也被制动,但由于输入轴138经由变矩器41与发动机24的输出轴连结,因此通过变矩器41防止高抵抗力矩被施加于发动机24。
[第4实施方式]
图6是示出第4实施方式所涉及的替代制动装置的齿轮式自动变速器12的说明图。该实施方式的齿轮式自动变速器12是一般被称为“直接换挡CVT”的、具备起动齿轮158和无级变速器160的前轮驱动车用齿轮式变速器,包括行星齿轮装置162。行星齿轮装置162是与第3实施方式的行星齿轮装置114同样地构成的双小齿轮式行星齿轮装置。
与第3实施方式的无级变速器112同样地,无级变速器160包括初级带轮166、次级带轮168及卷绕于这些带轮的金属带170。与无级变速器112同样地,无级变速器160通过使两个带轮的金属带170的绕线直径变化,来使变速比无级地变化。
行星齿轮装置162包括与中间轴172一体地设置的太阳齿轮174、与太阳齿轮174啮合的内小齿轮176、与内小齿轮176啮合的外小齿轮178、及与外小齿轮178啮合的齿圈180。支承内小齿轮176及外小齿轮178的齿轮架182通过曲柄186与输入轴188连结,经由No.1离合器C41通过曲柄190与中间轴172连结。
输入轴188构成为一端能够与中间轴172连结,另一端经由变矩器41与发动机24的输出轴连结,接受来自发动机的驱动扭矩。另外,在离合器C41处于连接状态时,输入轴188与中间轴172的连结被解除,在离合器C41处于连接解除状态时,输入轴188与中间轴172被连结。中间轴172根据需要通过与输入轴188侧相反侧的端部与初级带轮166的轴194连结。
在行星齿轮装置162的齿圈180的外侧设置有倒车制动器RB。倒车制动器RB构成为在处于工作状态时向齿圈180赋予制动力。此外,在No.1离合器C41处于连接状态时,倒车制动器RB维持为不向齿圈180赋予制动力的非工作状态,在离合器C41处于连接解除状态时,倒车制动器RB被设定为工作状态。离合器C41、C42及倒车制动器RB的状态由变速控制装置16控制。
另外,在该实施方式中,用于使倒车制动器RB工作的制动压力发生装置(未图示)也是独立于制动装置20的高压发生装置(未图示)之外的装置。由此,即使后者的高压发生装置发生了异常,倒车制动器RB也能够工作,能够赋予必要的制动力。
在中间轴172设置有No.1驱动齿轮196,驱动齿轮196与No.1从动齿轮198啮合。从动齿轮198通过同步机构200而根据需要与No.2驱动齿轮202连结。驱动齿轮202与No.2从动齿轮204啮合,从动齿轮204通过No.2离合器C42而根据需要与次级带轮168的轴206连结。另外,同步机构200也由变速控制装置16控制。
如后面说明的那样,驱动齿轮196、从动齿轮198、同步机构200、驱动齿轮202及从动齿轮204构成不经由无级变速器160而将驱动扭矩向从动齿轮204的起动齿轮158传递。起动齿轮158的减速比设定得比无级变速器160的最大的减速比更大。
此外,No.2从动齿轮204与减速驱动齿轮208一体地旋转,减速驱动齿轮208与减速从动齿轮210啮合。减速从动齿轮210通过输出轴211与差动驱动小齿轮212一体地连结,差动驱动小齿轮212与差动齿圈214啮合。如图1所示,差动驱动小齿轮212及差动齿圈214经由驱动轴62L及62R将驱动扭矩向作为驱动轮的左右前轮64L及64R传递。
<驱动力传递模式的切换>
在驱动力经由起动齿轮158而传递的齿轮模式与驱动力经由无级变速器160而传递的带模式之间的驱动力传递模式的切换,是通过同步机构200及No.2离合器C42被变速控制装置16控制来进行的。
在车辆14起动时那样驱动轮需要低速旋转且在高扭矩下旋转的情况下,设定齿轮模式。在齿轮模式下,同步机构200工作,No.2离合器C42的连接被解除。此外,中间轴172与初级带轮166的轴194的连结被解除。
由此,从中间轴172向No.1驱动齿轮196传递的驱动力经过No.1从动齿轮198及同步机构200向No.2驱动齿轮202传递。但是,由于不从中间轴172向初级带轮166的轴194传递驱动力,因此驱动力不从次级带轮168的轴206向No.2从动齿轮204传递。
在带模式下,同步机构200的工作被解除,No.2离合器C42被连接。此外,中间轴172与初级带轮166的轴194被连结。由此,中间轴172的驱动力被向初级带轮166的轴194传递,驱动力从次级带轮168的轴206向No.2从动齿轮204传递。驱动力从No.1驱动齿轮196向No.1从动齿轮198传递,但驱动力不从从动齿轮198向No.2驱动齿轮202传递。
<前进后退的切换>
在齿轮模式及带模式之中的任意模式下,No.1离合器C41及倒车制动器RB都被变速控制装置16控制,从而进行前进与后退之间的切换。此外,在车辆14前进时及后退时之中的任意情况下,都由变速控制装置16如上述那样使初级带轮166及次级带轮168处的金属带170的卷绕直径变化,来进行带模式下的无级的变速比的控制。
在车辆14前进时,倒车制动器RB被维持在非工作状态下,No.1离合器C41被连接。输入轴188的驱动力经过曲柄186、齿轮架182、内小齿轮176及外小齿轮178、离合器C41及曲柄190向中间轴172传递。
与之相对,在车辆14后退时,在倒车制动器RB工作的状态下No.1离合器C41的连接被解除,输入轴188与中间轴172被连接。输入轴188的驱动力作为与前进时相反方向的旋转力直接向中间轴172传递。
<替代制动控制>
在第4实施方式的替代制动控制中,离合器C41被连接,离合器C42的连接被解除,同步机构200工作,倒车制动器RB工作。替代制动控制中的离合器C41、离合器C42、同步机构200及倒车制动器RB的控制情形在齿轮模式及带模式之中的任意模式下,都不同于车辆14前进时及后退时的离合器C41等控制情形。
离合器C41等被如上述那样控制,从而齿圈180被制动,内小齿轮176、外小齿轮178及齿轮架182被制动。其制动扭矩由离合器C41及曲柄190向中间轴172传递,经过驱动齿轮196、从动齿轮198及同步机构200向驱动齿轮202传递。
此外,制动扭矩从驱动齿轮202经过从动齿轮204及减速驱动齿轮208向减速从动齿轮210传递,由此输出轴211被制动。此外,制动扭矩向差动驱动小齿轮212及差动齿圈214传递。由此,左右前轮64L及64R被制动,由此车辆14被减速,车辆根据需要被停止。
另外,支承内小齿轮176及外小齿轮178的齿轮架182经由曲柄186与输入轴188连结。由此,输入轴188也被制动,但输入轴188经由变矩器41与发动机24的输出轴连结,因此通过变矩器41防止高抵抗力矩施加于发动机24。
从以上的说明可知,根据上述第1至第4实施方式,在自动行驶控制的执行期间且制动装置20和/或制动控制装置22异常的状况下,在判定为自动行驶控制产生了制动请求并且需要车辆制动时,进行替代制动控制。由此,即使在制动装置20和/或制动控制装置22异常、由制动装置20无法正常地向车轮赋予制动力的状况下,也能够有效地使车辆14减速并停止。
[第5实施方式]
图7是包括本发明的车辆的替代制动装置的第5实施方式的控制框图。该实施方式是在通过驾驶员的驾驶而行驶的期间根据需要执行替代制动的实施方式。另外,在图7中,针对与图1所示的框相同的框,标注与在图1中所标注的标号相同的标号。
如图7所示,通过驾驶员操作制动踏板220而被驱动的主缸222内的压力即主缸压力Pm由压力传感器224检测。示出主缸压力Pm的信号被输入到制动控制装置22,制动控制装置22在通常时,以使各车轮的制动力成为与主缸压力Pm对应的制动力的方式控制制动装置20。
制动踏板220设置有刹车灯开关226,如果制动踏板220被驾驶员操作,则刹车灯开关接通。另外,根据需要也将表示主缸压力Pm的信号及表示刹车灯开关226是否接通的信号输入到控制齿轮式自动变速器12的变速控制装置16。另外,该实施方式中的自动变速器12可以与上述第1至第4之中的任意实施方式中的自动变速器12相同,进而只要构成为包括离合器及制动器并且自动变速器的输出轴由制动器的制动力制动,则可以为任意的齿轮式自动变速器。
<变速控制装置进行的变速控制>
接下来,参照图8所示的流程图,对第5实施方式中的包括替代制动控制的变速控制例程进行说明。在未图示的点火开关接通时,变速控制装置16在每当经过规定的时间时重复执行图8所示的流程图的控制。
首先,在步骤110中,与前述的步骤10同样地,基于从自动行驶控制装置18发送的信息,判别是否处于如远程驻车那样的自动行驶的控制期间。在做出了否定判别时变速控制进行到步骤130,在做出了肯定判别时变速控制进行到步骤120。
在步骤120中,与前述的步骤50同样地,基于从自动行驶控制装置18发送的信息,进行为了实现自动行驶而必需的变速档的控制。
在步骤130中,与前述的步骤30同样地,基于从制动控制装置22发送的信息,判别制动装置20和/或制动控制装置22是否发生了制动装置20无法正常地向车轮赋予制动力的异常。在做出了否定判别时变速控制进行到步骤150,在做出了肯定判别时变速控制进行到步骤140。
在步骤140中,基于从刹车灯开关226发送的信息,判别刹车灯开关是否接通、即判别是否需要车辆的制动。在做出了肯定判别时变速控制进行到步骤160,在做出了否定判别时变速控制进行到步骤150。另外,也可以在下述的条件(4)至(7)中的任一条件成立时,判别为需要制动。
(4)基于从刹车灯开关226发送的信息,刹车灯开关接通。
(5)基于从制动控制装置22发送的信息,主缸压力Pm为基准值以上。
(6)推定为由于制动装置20和/或制动控制装置22的异常导致无法正常地向车轮赋予制动力。
(7)无法与制动控制装置22通信,无法确认能够正常地向车轮赋予制动力。
在步骤150中,与前述步骤20同样地,根据驾驶员的驾驶操作及车辆的行驶状况,基于在该技术领域中的公知的要领来进行通常的变速档的控制。
在步骤160中,进行替代制动,在该替代制动中,以通过自动变速器12的制动器的制动力将自动变速器的输出轴制动的方式控制离合器及制动器。在该情况下,在来自压力传感器224的表示主缸压力Pm的信号被输入到变速控制装置16时,也可以根据主缸压力Pm来控制自动变速器12的制动器的制动力。此外,在表示主缸压力Pm的信号未从压力传感器224输入到变速控制装置16时,可以是自动变速器12的制动器的制动力逐渐增大,使车辆14停止。
根据第5实施方式,在处于驾驶员驾驶车辆的期间且制动装置20和/或制动控制装置22处于异常的状况下时,在产生了驾驶员的制动请求并且需要制动时,进行替代制动控制。由此,即使在制动装置20和/或制动控制装置22异常、由制动装置20无法正常地向车轮赋予制动力的状况下,也能够有效地使车辆14减速并停止,从而满足驾驶员的制动请求。
在以上对本发明的特定的实施方式详细地进行了说明,但本发明不限于上述实施方式,在本发明的范围内也能够实施其他各种实施方式,这对本领域普通技术人员而言是不言自明的。
例如,替代制动控制由变速控制装置16执行,但在第1至第4实施方式中也可以由自动行驶控制装置18或其他控制装置执行,在第5实施方式中也可以由变速控制装置16以外的控制装置执行。
此外,在第1实施方式中,齿轮式自动变速器12是前轮驱动车用8速自动变速器,在第2实施方式中,齿轮式自动变速器12是后轮驱动车用10速自动变速器。此外,在第3及第4实施方式中,齿轮式自动变速器12是具备无级变速器的前轮驱动车用齿轮式自动变速器。但是,应用本发明的车辆的齿轮式自动变速器只要构成为包括至少一个离合器及至少一个制动器并且自动变速器的输出轴由制动器的制动力制动即可,可以为任意的齿轮式自动变速器。
此外,在第1实施方式中,通过控制离合器及制动器,在输入轴32能够自由地旋转的状态下进行替代制动。此外,在第2至第4实施方式中,在替代制动时,通过变矩器41的作用来降低施加于发动机24的抵抗力矩。但是,在取代变矩器而设置有控制驱动力的传递及中断的离合器的车辆中,在替代制动时也可以断开该离合器。
此外,在第1至第4实施方式中,在自动行驶的控制期间根据需要进行替代制动,在第5实施方式中,在基于驾驶员的驾驶操作的行驶期间根据需要进行替代制动。但是,也可以将第1至第4实施方式与第5实施方式组合。即,在图8所示的流程图的步骤110中进行了肯定判别时,也可以代替步骤120,执行图3所示的流程图的步骤30~60。
此外,在第5实施方式中,应用于能够进行自动行驶的控制的车辆,但第5实施方式中未设置自动行驶控制装置18,因此也能够应用于不进行自动行驶的控制的车辆。在这种情况下,省略图7所示的框图的自动行驶控制装置18,省略图8所示的流程图的步骤110及120。
10…替代制动装置;12…齿轮式自动变速器;14…车辆;16…变速控制装置;18…自动行驶控制装置;20…制动装置;22…制动控制装置;24…发动机;28…前行星齿轮装置;30…后行星齿轮装置;41…变矩器;70…前行星齿轮装置;62FL及62FR…前轮;72…中间行星齿轮装置;74…后行星齿轮装置;112…无级变速器;114…行星齿轮装置;158…起动齿轮;160…无级变速器;162…行星齿轮装置;C11~C14、C21~C24、C41、C42…离合器;B11、B12、B21、B22…制动器;FC…前进离合器;RB…倒车制动器。
- 车辆的替代制动装置
- 用于车辆的制动装置、包括该制动装置的车辆以及用于对包括该制动装置的车辆的旋转轮进行制动的方法