一种全线控全向型车辆底盘系统和控制方法
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及无人车技术领域,具体是一种全线控全向型智能车底盘的控制系统。
背景技术
随着科技的发展,无人智能车技术也越来越成熟,各式各样的无人智能车出现在各行各业服务着人们的生活,给人们的生产生活带来便捷。但是,随着交通环境越来越差以及无人智能车工作条件的越来越复杂,现有的无人车已经无法适应每况愈下的工况。
全线控全向型智能车因其独特的四轮驱动四轮转向的特点,底盘能够任意角度转向,拥有更多的自由度,能适应复杂的工况,成为人们研究的热点。而如何使底盘控制更加精确,控制效率更高,一直是要解决的问题。
发明内容
本发明所要解决的技术问题是实现一种全线控全向型智能车底盘的控制系统,电路以及方法,以解决当前无人智能车底盘无法适应复杂的工况以及全线控全向型智能车底盘控制不稳定的问题,使底盘的结构更加简单,提高控制效率和精度。
为了实现上述目的,本发明采用的技术方案为:一种全线控全向型车辆底盘系统,车辆设有四个独立驱动每个车轮转动的行走电机,以及独立驱动每个车轮转向的转向电机,系统设有控制器模块连接主控制器A和主控制器B,所述主控制器A连接驱动模块,并通过驱动模块向行走驱动器和转向驱动器发出驱动信号,所述行走驱动器连接行走电机,所述转向驱动器连接转向电机,所述主控制器智能控制单元并与智能控制单元通信。
所述智能控制单元包括导航模块和避障模块,所述导航模块连接车辆上的惯导和深度相机,所述避障模块连接安装在车辆车架的外周面上的感应设备,所述感应设备包括激光雷达、超声波传感器、防跌落传感器、四周防碰撞传感器中的部分或全部。
车辆每个车轮设有制动模块,所述主控制器A连接制动模块并输出驱动信号至制动模块。
所述控制器模块连接遥控开关,所述遥控开关连接与其匹配的遥控设备的遥控信号。
所述控制器模块连接控制电路,所述控制电路连接电源模块、电路保护模块和显示模块,所述电源模块连接并监控的器件包括48V电池、48V转24V电源转换器,24V转12V电源转换器、12V转5V电源转换器,所述电路保护模块连接并监控的器件包括保险丝盒和继电器,所述显示模块连接车辆上的显示屏、转向指示灯和制动指示灯。
所述行走电机均为轮毂电机,每个所述行走电机均设有独立的行走驱动器,所述转向电机均设有独立的转向驱动器,所述48V电池经遥控开关、继电器连接保险丝盒,所述保险丝盒的八个输出端分别连接四个转向驱动器和行走驱动器,每个转向驱动器连接所控制的转向电机,每个行走驱动器连接所控制的行走电机。
所述继电器的另一个输出端连接48V转24V电源转换器,所述48V转24V电源转换器的输出端分别连接主控制器A、主控制器B和24V转12V电源转换器,所述24V转12V电源转换器的输出端连接分别连接显示屏、转向指示灯、制动指示灯和12V转5V电源转换器,所述12V转5V电源转换器的输出端连接分别连接惯导、深度相机、激光雷达、超声波传感器、防跌落传感器、四周防碰撞传感器。
基于所述全线控全向型车辆底盘系统的控制方法:
当系统接收到遥控信号后,遥控开关启动车辆,48V电池为所有器件上电;
主控制器B实时将获取的信号输送至控制器模块;
遥控开关将接收到的遥控信号输送至控制器模块,控制器模块将遥控信号输送至主控制器A,并由主控制器A驱动转向电机和行走电机工作。
控制器模块时间将车参数输送至显示屏显示,显示屏显示的参数包括速度、电流、航向角,当转向电机驱动车辆转向时,转向指示灯闪烁,当制动模块驱动车辆制动时,制动指示灯亮起并在制动结束后熄灭。
上述系统搭载的底盘设有车架,车架两侧分别通过独立的轮架固定有车轮,每个所述轮架连接独立的转向单元,所述转向单元设有轮毂轴承套,所述轮毂轴承套上方固定有输出法兰,所述输出法兰上固定有减速器,所述减速器的输入端连接转向电机,所述轮毂轴承套内设有轮毂转轴,所述轮毂转轴上端连接减速器的输出端,所述轮毂转轴下端连接轮架,所述轮毂轴承套通过连接件固定在所在侧的车架上。
所述轮毂轴承套上端是通过深沟球轴承与轮毂转轴连接,下端通过圆锥滚子轴承与轮毂转轴连接。
所述连接件设有通过转轴固定在轮毂轴承套两侧的两组悬架下摆臂和悬架上摆臂,同侧的悬架下摆臂和悬架上摆臂的外端通过悬架固定板连接,所述悬架固定板固定在车架上,两根所述悬架上摆臂之间连接有连杆,所述连杆与减震器一端连接,所述减震器另一端通过减震支架固定在车架上。
所述车架是由悬架左侧板、悬架后挡板、悬架右侧板、悬架前挡板围在悬架底板四周构成的框架结构,所述悬架底板上设有固定锂电池的电池仓,所述锂电池为动力电池。
所述悬架前挡板围上固定有显示屏,所述悬架左侧板和悬架右侧板的上檐固定有铝型材。
所述轮架由固接的轮毂竖支架和轮毂横支架构成L形结构,所述轮毂竖支架的下端设有用于固定车辆的轮毂套孔,所述轮毂竖支架的上端与轮毂横支架之间连接有轮毂支架筋板,所述轮毂转轴的下端固接在轮毂横支架上。
每个所述车轮内均设有轮毂电机,所述轮毂电机的轮毂电机输出轴安装在轮毂竖支架的轮毂套孔内。
本发明全线控全向型车辆底盘系统与现有技术相比具备以下有益效果:
1.该全线控全向型智能车底盘的控制系统、电路及方法,通过控制器模块分别控制4个行走电机和4个转向电机实现了底盘的四轮独立驱动与转向,整车可以工作在直线行驶模式,楔形行驶模式,阿克曼转向模式,原地转向模式,提高了底盘的自由度,使底盘可以适应复杂的工况和行驶条件,有效解决了现有一些智能车底盘在应对复杂的行驶路况下不能正常运行的问题。
2.该全线控全向型智能车底盘的控制系统、电路及方法,整车电子控制,完全省去机械传动结构,控制模块主控制器A与驱动模块通过CAN总线通讯,具体的,与行走驱动器为CANA通讯,与转向驱动器为CANB通讯,各传感器与控制器之间通过串口通讯。解决了全向底盘的全线控问题。
3.该全线控全向型智能车底盘的控制系统、电路及方法,控制模块包括主控制器A和主控制器B。主控制器B负责采集导航模块、避障模块反馈的信息并做出路径决策,主控制器A负责直接控制驱动模块使整车具有相应的速度与转向角度,能按照规划的路劲平稳精确地到达预定目的地。控制系统分工明确、各司其职,有效的提高了底盘控制效率。
附图说明
下面对本发明说明书中每幅附图表达的内容及图中的标记作简要说明:
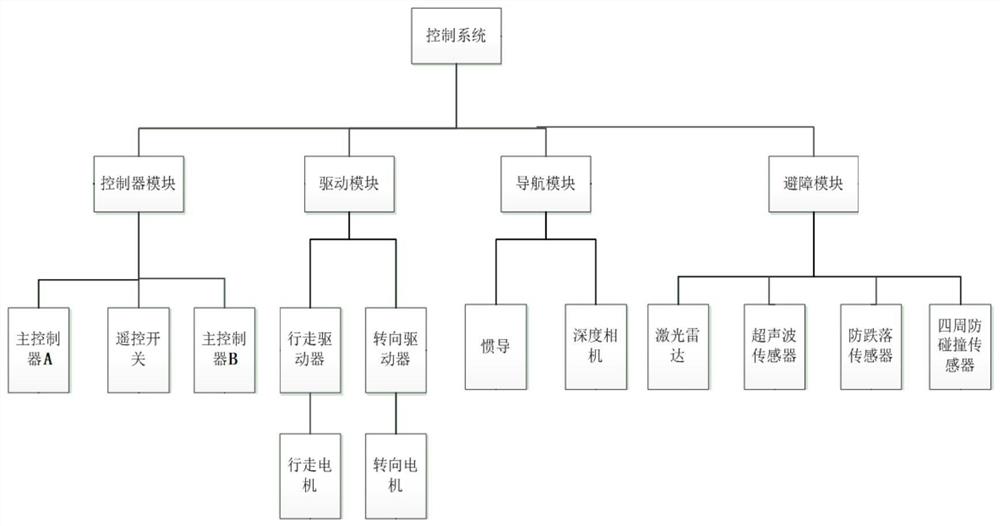
图1为全线控全向型车辆底盘系统构成框图;
图2为全线控全向型车辆底盘系统工作原理框图;
图3为全线控全向型车辆底盘系统控制电路构成框图;
图4为全线控全向型车辆底盘系统控制电路示意图;
图5是四轮独立驱动独立转向线控底盘结构示意图;
图6是四轮独立驱动独立转向线控底盘上视图;
图7是四轮独立驱动独立转向线控底盘的正视图;
图8是左后轮毂装配剖视图;
图9是阿克曼转向示意图;
图10是蟹形转向示意图;
图11是斜形转向示意图;
图12是原地旋转示意图;
上述图中的标记均为:1、轮毂电机;2、轮毂电机输出轴;3、轮毂套孔;4、轮毂竖支架;5、轮毂支架筋板;6、轮毂横支架;7、轮毂转轴;8、圆锥滚子轴承;9、深沟球轴承;10轮毂轴承套;11、输出法兰;12、减速器;13、转向电机;14、悬架下摆臂;15、悬架上摆臂;16、悬架固定板;17、减震器;18、减震支架;19、悬架左侧板;20、悬架后挡板、21、悬架右侧板;22、悬架前挡板;23、显示屏;24、铝型材;25、悬架底板;26、电池仓。
具体实施方式
下面对照附图,通过对实施例的描述,本发明的具体实施方式如所涉及的各构件的形状、构造、各部分之间的相互位置及连接关系、各部分的作用及工作原理、制造工艺及操作使用方法等,作进一步详细的说明,以帮助本领域技术人员对本发明的发明构思、技术方案有更完整、准确和深入的理解。
全线控全向型车辆底盘系统包括控制器模块、驱动模块、导航模块、避障模块。所述驱动模块,导航模块、避障模块,制动模块在控制器模块的统筹下协调工作。所述控制器模块包括主控制器A、主控制器B和遥控开关。其中,主控制器A和主控制器B选用DSPTMS320F28335。所述控制系统可以控制底盘实现不同行驶模式,包括直线行走,楔形行走、阿克曼转向、原地自转。
驱动模块包括四个轮行走电机及驱动器,四个转向电机及驱动器,所述八个驱动器选用DSP TMS320F28069。四个行走电机工作在电流和速度模式,所述四个转向电机工作在位置模式。四个行走电机完全相同以下统称为行走电机,所述四个转向电机完全相同,以下统称为转向电机,四个行走电机驱动器完全相同,以下统称为行走电机驱动器,所述转向电机驱动器完全相同,以下统称为转向电机驱动器。
驱动模块包括四个完全相同的行走驱动器,连接四个完全相同的行走电机,四个完全相同的转向驱动器,连接四个完全相同的转向电机
导航模块连接惯导和深度相机,惯导和深度相机协同工作,导航模块连接主控制器B,由主控制器B协调工作,避障模块连接激光雷达,超声波传感器、防跌落传感器以及四周防碰撞传感器,激光雷达、超声波传感器、防跌落传感器以及四周碰撞传感器协同工作,避障模块,避障模块连接主控制器B,由主控制器B协调工作。
导航模块、避障模块在控制器模块的统筹下协调工作,共同保证底盘的运行。惯导在车辆行驶过程中随时监测整车的位姿,包括上传速度、加速度、航向角,深度相机用来对底盘行驶时的环境进行三维建模。避障模块包括激光雷达、超声波传感器、防跌落传感器和四周防碰撞传感器,激光雷达可以对底盘前进方向上下度范围进行扫描,以实时监测路面状况,超声波模块和四周防碰撞模块对整车周围的障碍物进行监测,并将信息实时上传,防跌落传感器在底盘遇到较深的沟等高度较大的路况时及时将信息反馈。
上述系统的供电结构如图3所示,供电具有独立的控制电路,控制器模块连接控制电路对其进行协调控制,控制电路连接电源模块、电路保护模块和显示模块,电源模块连接并监控的器件包括48V电池、48V转24V电源转换器,24V转12V电源转换器、12V转5V电源转换器,电路保护模块连接并监控的器件包括保险丝盒和继电器,所述显示模块连接车辆上的显示屏、转向指示灯和制动指示灯。
每个行走电机均设有独立的行走驱动器,所述转向电机均设有独立的转向驱动器,所述48V电池经遥控开关、继电器连接保险丝盒,所述保险丝盒的八个输出端分别连接四个转向驱动器和行走驱动器,每个转向驱动器连接所控制的转向电机,每个行走驱动器连接所控制的行走电机。
继电器的另一个输出端连接48V转24V电源转换器,所述48V转24V电源转换器的输出端分别连接主控制器A、主控制器B和24V转12V电源转换器,所述24V转12V电源转换器的输出端连接分别连接显示屏、转向指示灯、制动指示灯和12V转5V电源转换器,所述12V转5V电源转换器的输出端连接分别连接惯导、深度相机、激光雷达、超声波传感器、防跌落传感器、四周防碰撞传感器。
四轮独立驱动独立转向线控底盘,包括车架、四个轮毂电机1进行驱动的驱动轮、四个转向电机13分别控制底盘四个车轮的转向,每个车轮均可实现360度转向,具有多种运动模式进行选择,具有非常强的适应性和灵活性,解决了复杂狭窄路况下通过性问题。
车辆设四个轮毂电机1,每侧两个分布在车身两侧,每个轮毂电机1外均设有车轮,每个车轮的轮毂内均装有独自驱动的轮毂电机1,通过放置于车身下方电池仓26里的锂电池供电,而且每个驱动轮也同样是转向轮,则每个车轮可以独立的运转。
每个轮毂电机1中心均设有向车辆内侧延伸的轮毂电机输出轴2,每个轮毂电机输出轴2均固定独立的轮毂竖支架4底端的轮毂套孔3内,轮毂竖支架4竖直设置,轮毂竖支架4与轮毂电机输出轴2通过六角螺母相连,轮毂竖支架4与轮毂横支架6用轮毂支筋板相连,整个构成L形的轮架,轮毂横支架6位于车轮的上方,轮毂横支架6上是轮毂转轴7,轮毂转轴7外面是轮毂轴承套10,轮毂轴承套10上端是深沟球轴承9,轮毂轴承套10下端是圆锥滚子轴承8,使得轮毂转轴7能够在轮毂轴承套10内转动。
轮毂转轴7下方与轮毂横支架6用若干螺栓相连接,轮毂转轴7上方与减速机之间用键固定,转向电机13的输出轴与减速机采用直连的方式进行连接,输出端与轮毂转轴7进行直连方式连接,轮毂轴承套10与减速器12之间是输出法兰11。
轮毂轴承套10外部用于与所在侧车架侧板连接,一般在轮毂轴承套10两侧的上下分别与悬架下摆臂14和悬架上摆臂15相连,并且悬架下摆臂14和悬架上摆臂15相互平行和相对轮毂轴承套10上下摆动,同侧的悬架下摆臂14和悬架上摆臂15外端均通过转轴固定在悬架固定板16的两端,悬架固定板16相连固定在悬架侧板上。
悬架上摆臂15上安装有减震器17,减震器17与减震支架18相连,减震支架18与悬架侧板相连,上述轴承座与减速器12之间是输出法兰11,输出法兰11上是减速器12,减速机与转向电机13相连。每个驱动系统都对应着一个独立的悬架系统,减震器17可以起到不错的减震效果,从而保证车辆具有较好悬挂系统。
车架是由悬架左侧板19、悬架后挡板20、悬架右侧板21、悬架前挡板22围在悬架底板25四周构成的框架结构,悬架底板25上设有固定锂电池的电池仓26,电池仓26与悬架底板25用六角沉头螺栓相连接,锂电池为动力电池,动力电池为整车电机供电,电控面板安装于悬架后挡板20之上并用内六角螺栓固定,铝型材24对称安装与悬架左侧板19和悬架右侧板21上方。
控制系统包括控制器,四个转向电机13的四个转向驱动器,四个轮毂电机1的四个行走驱动器,轮毂电机1优选带编码器的轮毂电机1,转向电机13也选用带绝对值编码器的转向电机13,这样整车电池即使没电也仍能记录每个轴的转向角以及每个车轮的工作状态,控制器输出控制信号至每个转向电机13和轮毂电机1,通过控制器调节,转向电机13根据电子控制单元单元的控制信号提供相应的转矩。
可以在悬架底板25上固定有控制车子运动的遥控手柄和电脑上位机,可以通过遥控和电脑上位机对该底盘进行命令下发达到良好的控制效果。遥控器与无线天线相连,天线与控制器相连,控制器再与电机驱动器相连,电机驱动器再与电机相连,进而控制四个转向电机13与轮毂电机1的运动。
在进行转向时,左后转向电机13驱动器控制转向电机13工作,转向电机13带动减速器12旋转,减速器12减速增扭之后带动轮毂转轴7工作,轮毂转轴7带动轮毂横支架6和竖支架运动,从而带动轮毂电机1进行转向,转向过程中轮毂轴承套10始终保持不动,具有阿克曼、蟹行、斜行以及原地转向等转向模式。
具有工作模式例如:普通行车模式,后轮保持直行,前轮根据转向操作进行偏转;如图5所示阿克曼行驶模式,同侧车轮角度相同,同轴车轮转向角度不同,可实现较小转弯半径行驶;如图6所示蟹型行驶模式,四个车轮均转向90度,可实现原地向左或者向右横向行驶;如图7所示斜型行驶模式,四个车轮转动相同的角度,可向各个角度斜型行走。如图8所示原地转向行驶模式,四个车轮均向内侧旋转一定角度,可实现零转弯半径原地自转。
全线控全向型智能车底盘的控制方法,具体包括以下步骤:
步骤一、首先人员通过遥控开关启动车辆,底盘整体上电,具体包括,48V电池的电压经遥控开关,和继电器到达保险丝盒,48V的电压从保险丝盒出来分配给行走驱动器和对应的行走电机,转向驱动器和对应的转向电机。进一步的48V转24V将48V电源转换器将48V的电压为24V给主控制器A和主控制器B供电,再经过24V转12V电源转换器给转向指示灯、制动指示灯和显示屏。12V的电压经过12V转5V电源转换器后给导航模块,包括惯导、深度相机,以及避障模块,包括激光雷达、超声波传感器、防跌落传感器以及四周防碰撞传感器供电。当电路中电流的大小超过阈值时保险丝盒中的保险丝熔断,以达到保护电路的作用。
步骤二、底盘行驶时,具体的,直线行驶时,导航模块将路面信息与路况条件实时反馈给控制模块,其中惯导将底盘的位姿信息上传给控制模块,包括航向角,速度和加速度,深度相机实时监控底盘前方的路面环境并将采集的信息反馈给控制模块A。避障模块将底盘四周的障碍物,阻挡物情况采集上来并反馈给控制模块,其中超声波传感器、激光雷达和四周防碰撞传感器检测底盘周围的障碍物情况,防跌落传感器在整车遇到较深的沟以及楼梯时将信息上传至控制模块。控制模块根据反馈回来的信息构建地图并作出路径规划,从而下发指令给行走驱动器和转向驱动器以控制行走电机的速度和转向电机的角度。同时在底盘的行驶中不断根据导航模块上传的路面信息实时调整车的位姿以确保行驶的稳定和精确。其中,主控制器B负责收集导航模块和避障模块的采集的信息并据此作出路径规划,主控制器A根据主控制器B规划的路径下进行解析并发指令给行走驱动器以及转向驱动器以控制行走电机的速度和转向电机的角度使底盘准确的沿着规划的路径行驶,并根据反馈来的信息实时调整整车的位姿。
步骤三、底盘行驶时,具体的,在底盘转弯时,主控制器A根据阿克曼转向定理解析出四个轮子的转向角度并下发指令给转向驱动器使转向电机作出相应动作带动轮胎转动。楔形转向时,主控制器A通过下发指令给转向驱动器使转向电机转动使四个轮子转动相同的角度。原地自转时,主控制器A根据底盘的轮距和轴距计算出原地自转时四个轮子的转向角度,并下发指令给转向驱动器使转向电机转动带动轮胎转动至计算的角度。以上三种模式均在主控制器A根据导航模块,避障模块上传的信息确保底盘行驶条件安全下进行。底盘正常行驶时,显示屏显示运行参数,包括速度、电流、航向角。当底盘转向时,转向指示灯闪烁以提醒周围行人及车辆,当底盘刹车时,制动指示灯亮起,以提示后方车辆及行人,同时行走电机切换到电流模式,以力矩来控制,以达到降速的目的。
上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
- 一种全线控全向型车辆底盘系统和控制方法
- 一种四轮独立转向无人驾驶车辆的线控底盘系统