一种清洁机构及清洁机器人
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及清洁技术领域,尤其涉及一种清洁机构及清洁机器人。
背景技术
随着自动化技术和人工智能的发展,智能机器人的需求越来越广泛。清洁机器人能够对地面进行清洁,适用于各种室内室外环境,例如道路、公园、宾馆、车站等。
清洁机器人上的清洁机构一般包括盘刷和吸水扒,盘刷用于洗地,吸水扒设置在盘刷的后侧,通过与地面接触,将垃圾和污水回收至污水箱中。吸水扒上连接有吸水管,在吸水扒停止工作时,吸水管中残留的部分污水会回流,导致地面积水,不仅对地面造成二次污染,而且使得地面潮湿,此时人走过后地面会留下脚印和污迹,甚至人会滑倒。
发明内容
本发明的目的在于提供一种清洁机构及清洁机器人,以解决现有技术中存在的吸水扒将污水吸收后,地面上会留下一些水分和水迹的技术问题。
如上构思,本发明所采用的技术方案是:
一种清洁机构,包括吸水扒组件,所述吸水扒组件包括:
吸水扒本体,其中部形成空腔,所述空腔的底壁上形成进水口,所述空腔的顶壁上形成出水口,所述进水口与所述出水口错位设置,所述空腔的底壁上形成储水槽,所述储水槽低于所述进水口;
吸水管,与所述出水口连通。
其中,所述空腔的底壁上绕所述进水口的周向向下凹陷形成所述储水槽。
其中,所述进水口设置有两个,所述出水口正对两个所述进水口的中间位置,两个所述进水口的周边均向下凹陷。
其中,所述吸水扒本体包括可拆卸连接的骨架和外壳,所述外壳与所述骨架之间形成所述空腔,所述出水口设置于所述外壳的顶部。
其中,所述吸水扒本体还包括转接板,所述转接板位于所述空腔内且与所述骨架固定连接,所述进水口和所述储水槽均设置于所述转接板上。
其中,还包括升降组件,所述吸水扒组件还包括第一支架,所述吸水扒本体与所述第一支架固定连接,所述升降组件包括推杆电机和第二支架,所述第一支架与所述第二支架之间通过转轴连接,所述转轴的轴线沿竖直方向延伸,所述吸水扒本体能够绕所述转轴摆动,所述推杆电机能够带动所述第二支架升降。
其中,所述第二支架上设置有双连杆机构,所述双连杆机构包括平行设置的第一连杆和第二连杆,所述第一连杆和所述第二连杆均与所述第二支架铰接。
其中,还包括:
平拖组件,沿清洁机构的前进方向,所述平拖组件位于所述吸水扒组件的后侧;
浮动结构,设置于所述吸水扒组件与所述平拖组件之间。
其中,所述平拖组件包括支撑板和抹布,所述支撑板与所述吸水扒本体连接,所述抹布设置于所述支撑板的底侧且与所述支撑板可拆卸连接,所述浮动结构设置于所述支撑板与所述吸水扒本体之间。
一种清洁机器人,包括如上所述的清洁机构。
本发明的有益效果:
本发明提出的清洁机构,包括吸水扒组件,在吸收污水时,污水自空腔的进水口进入、自出水口流入吸水管,在吸水管的负压作用下,空腔内不会存水。当吸水扒组件停止工作时,吸水管内的部分水从出水口回流,由于进水口与出水口错位设置,使得回流的水不会从进水口流到地面上,由于空腔的底壁上形成储水槽,且储水槽低于进水口,使得回流的水会进入储水槽中,因此不会污染地面。
附图说明
图1是本发明实施例提供的清洁机构的一个角度的结构示意图;
图2是本发明实施例提供的清洁机构的另一个角度的结构示意图;
图3是图2的部分结构示意图;
图4是本发明实施例提供的吸水扒组件的结构示意图;
图5是本发明实施例提供的吸水扒组件的分解结构示意图;
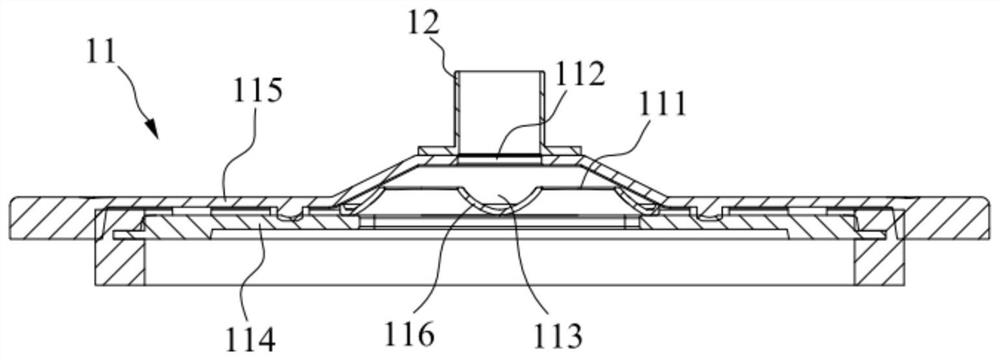
图6是本发明实施例提供的一种吸水扒组件的剖视图;
图7是本发明实施例提供的另一种吸水扒组件的剖视图;
图8是本发明实施例提供的再一种吸水扒组件的剖视图。
图中:
10、吸水扒组件;
11、吸水扒本体;111、进水口;112、出水口;113、储水槽;114、骨架;115、外壳;116、转接板;117、进液口;
12、吸水管;13、第一支架;14、前胶条;15、后胶条;
20、平拖组件;
21、支撑板;22、抹布;
30、升降组件;
31、推杆电机;32、第二支架;33、第一连杆;34、第二连杆;
40、转轴。
具体实施方式
下面详细描述本发明的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
参见图1至图3,本发明实施例提供一种清洁机构,包括吸水扒组件10、平拖组件20和浮动结构,吸水扒组件10包括吸水扒本体11,沿清洁机构的前进方向,平拖组件20位于吸水扒组件10的后侧,可以有效地对潮湿的地面进行拖干,极大地提高了清洁效率,降低劳动强度。浮动结构设置于吸水扒组件10与平拖组件20之间,可以调节平拖组件20对地面的压力,使得平拖组件20与地面充分接触,进而实现不同的吸水、拖地效果。
平拖组件20包括支撑板21和抹布22,支撑板21与吸水扒本体11连接,抹布22设置于支撑板21的底侧且与支撑板21可拆卸连接,便于对抹布22进行清洁和更换,浮动结构设置于支撑板21与吸水扒本体11之间。
在本实施例中,浮动结构为弹簧,支撑板21上设置有定位柱,吸水扒本体11具有定位孔,定位柱滑动穿设于定位孔中,弹簧套设于定位柱上,弹簧的一端与支撑板21抵接,另一端与吸水扒本体11抵接。通过更换不同的弹簧,可以调节平拖组件20对地面的压力。在其他的实施例中,浮动结构也可以为橡胶垫。
清洁机构还包括升降组件30,吸水扒组件10还包括第一支架13,吸水扒本体11与第一支架13固定连接,升降组件30包括推杆电机31和第二支架32,第一支架13与第二支架32之间通过转轴40连接,转轴40的轴线沿竖直方向延伸,吸水扒本体11能够绕转轴40摆动,便于在清洁过程中平顺地进行转弯,避免应力对设备造成伤害。推杆电机31能够带动第二支架32升降,进而带动吸水扒组件10升降,在作业时落到地面进行吸水,不工作时抬起。
第二支架32上设置有双连杆机构,双连杆机构包括平行设置的第一连杆33和第二连杆34,第一连杆33和第二连杆34均与所述第二支架32铰接。双连杆机构可以保证吸水扒组件10在运动过程中保持水平,使得吸水扒组件10和平拖组件20能够与地面充分接触,保证清洁效果。
参见图4至图6,吸水扒组件10还包括吸水管12,吸水扒本体11的中部形成空腔,空腔的底壁上形成进水口111,空腔的顶壁上形成出水口112,进水口111与出水口112错位设置,空腔的底壁上形成储水槽113,储水槽113低于进水口111,吸水管12与出水口112连通。
在吸收污水时,污水自空腔的进水口111进入、自出水口112流入吸水管12,在吸水管12的负压作用下,空腔内不会存水。当吸水扒组件10停止工作时,吸水管12内的部分水从出水口112回流,由于进水口111与出水口112错位设置,使得回流的水不会从进水口111流到地面上,由于空腔的底壁上形成储水槽113,且储水槽113低于进水口111,使得回流的水会进入储水槽113中,因此不会污染地面。
空腔的底壁上绕进水口111的周向向下凹陷形成储水槽113,使得进水口111的边缘全部处于高位,储水槽113处于低位,防止水从进水口111流出。
在本实施例中,进水口111设置有两个,出水口112正对两个进水口111的中间位置,两个进水口111的周边均向下凹陷。两个进水口111的设置,能够保证进水量,且使得出水口112位于中间位置,便于进行布局。
在本实施例中,空腔呈梯形,可选地,空腔可以呈矩形。
参见图7,进水口111可以设置有一个,只要保证进水口111与出水口112错位,且储水槽113低于进水口111即可。
具体地,吸水扒本体11包括可拆卸连接的骨架114和外壳115,外壳115与骨架114之间形成空腔,出水口112设置于外壳115的顶部。进水口111和储水槽113可以设置于骨架114上,如图8所示。
可选地,吸水扒本体11还包括转接板116,转接板116位于空腔内且与骨架114固定连接,进水口111和储水槽113均设置于转接板116上,如图5至图7所示。骨架114上对应转接板116的位置开设有进液口117,污水能够经进液口117到达进水口111处。
骨架114和外壳115之间通过螺栓连接,便于安装拆卸。平拖组件20与外壳115连接。
吸水扒组件10还包括前胶条14和后胶条15,前胶条14设置于骨架114的前侧,后胶条15设置于骨架114的后侧,外壳115与骨架114夹紧前胶条14和后胶条15。
具体地,骨架114上设置有多个凸起,前胶条14与后胶条15上均设置有安装孔,凸起穿设于安装孔中,便于安装拆卸。
本发明实施例还提供一种清洁机器人,包括上述的清洁机构。清洁机器人包括本体,升降组件30的推杆电机31固定于本体上,双连杆机构的第一连杆33和第二连杆34均与本体铰接。
以上实施方式只是阐述了本发明的基本原理和特性,本发明不受上述实施方式限制,在不脱离本发明精神和范围的前提下,本发明还有各种变化和改变,这些变化和改变都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 拖布清洁机构、清洁机器人基站以及清洁机器人系统
- 清洁机器人的清洁机构和清洁机器人