一种水稻秧苗浅植摆栽方法及秧爪缩回式栽植臂
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及一种农业机械领域的种植机械,尤其涉及一种水稻秧苗浅植摆栽方法及实现该方法的栽植臂。
背景技术
申请号202010756290.8《一种水稻种植方法》,提出一种水稻种植方法,其中秧苗移栽时插秧深度为4-5cm。根据农艺要求,插秧深度在3cm以上时,秧苗的返青和分蘖受抑制明显,尤其低位节分蘖,分蘖质量差,严重影响了水稻的产量。
申请号201710388227.1《一种水稻钵苗机插高产种植方法》,提出一种水稻钵苗机插高产种植方法,其中的插秧部分使用传统插秧机机插,栽插深度控制在2cm以内。该方法的插秧深度在一定程度上提升了钵体苗毯状苗的分蘖速度,但是农艺要求钵体毯状苗浅插才能充分发挥其分蘖期早发和低节位分蘖的优势。
申请号201610372852.2《一种插秧机推秧器》,提出一种插秧机推秧器,包括推秧器头和推秧器轴,市场上常见插秧机插植臂都采用类似的装置,插植臂工作时秧爪插入土壤,然后推秧器将秧苗推入土壤。但是使用传统插秧机插秧时秧爪插入土壤中会形成插孔开口,推秧杆推秧后会在土壤中留下凹坑,不仅会影响秧苗的直立度,还会出现倒秧和漂秧现象,从而影响水稻的产量。
目前,我国的水稻机械化插秧技术趋于完善,毯状盘育秧技术成为主流,水稻机插主要采用毯状苗。插秧深度是评价插秧机作业质量的重要指标,影响水稻秧苗的返青和分蘖。按水稻农艺生产要求,一般情况为“不漂不倒,越浅越好”。浅植有利于分蘖期早发,到高峰苗较早,多为低节位分蘖,主穗、分蘖穗基本一致,成穗率高,有利于水稻增产。传统机械化插秧技术插秧深度一般在2-4cm,这时秧苗根系更多,生长旺盛,但是秧苗的返青和分蘖受到抑制,尤其是低位节分蘖,到高峰苗较晚,多为高节位分蘖,分蘖的质量差,不利于水稻高产。
分插机构是水稻插秧机的核心工作部件,主要包括回转箱和插植臂,它决定了机械插秧的质量。插植臂的作用是用秧爪将插秧机秧箱上的毯状秧苗切成一定株数的穴苗并将其插入田中的装置。目前,国内外市场上出售的插秧机插植臂结构形式和传动原理基本一致,由凸轮、压簧、杠杆和推秧杆共同完成推秧动作。但是这种插秧动作存在不足之处,一是秧爪插入土壤后,秧爪的绝对运动轨迹会在土壤中形成插孔开口,如果泥浆不能及时回填插口,会造成秧苗的漂秧和倒秧;二是推秧杆有一个推秧动作,然后再离开土壤,这样就会在土壤中留下一个凹坑,秧苗根部周围与泥土没有立即充分接触,如果稻田里水过多和泥浆回填不及时,不仅会影响秧苗的直立度,凹坑过大,还会出现倒秧和漂秧现象,特别是在地面凹处泥土较浅时最明显,从而影响水稻的产量。
针对现有技术存在的缺陷,本发明的目的是提供一种水稻秧苗浅植摆栽方法,缩短秧苗返青期的和提高分蘖质量,提高水稻的产量。为此,本发明还提供了实现该种摆栽方法的插秧机栽植臂。
本发明的水稻秧苗浅植摆栽方法基本思路是:按照水稻农艺生产要求,对水稻秧苗进行浅植摆栽,普通毯状苗种植深度在0.5-2cm,为了不出现散苗、漂苗和倒苗现象,种植深度不可低于0.5cm,钵体毯状苗种植深度小于钵体高度的2/3。
摆栽方法主要包括两个过程:一是秧爪将秧苗根部按入土壤,二是秧爪缩回脱秧完成摆栽。
栽植臂摆栽时,根据秧苗的类型分为以下两种情况:
(1)摆栽钵体毯状苗时,为了保证秧苗的直立性,秧爪与泥浆层所在水平面成一定角度,秧爪尖到泥浆层还有一段距离时停止向下运动,秧爪和挡秧片不入土,此时秧爪将秧苗的钵体按入泥浆层中。秧苗的钵体到达要求深度时,栽植臂秧爪迅速缩回,直至秧爪的爪尖与固装的组合式挡秧器的挡秧片齐平,挡秧片将秧苗脱下秧爪,完成水稻秧苗摆栽。实现了水稻钵体苗的浅植,而且避免了传统机插秧秧爪插入土壤产生的插孔开口和推秧杆推秧产生的凹坑。
(2)摆栽普通毯状时,为了保证秧苗的直立性,秧爪与泥浆层所在水平面成一定角度,秧爪插入泥浆层,将秧苗根部按入泥浆层中。秧苗根部到达要求深度时,栽植臂秧爪迅速缩回,直至秧爪尖与固装的组合式挡秧器的挡秧片齐平,挡秧片将秧苗脱下秧爪,完成水稻秧苗摆栽。实现了水稻普通毯状苗的浅植,而且避免了传统机插秧推秧杆推秧产生的凹坑。
本发明的秧爪缩回式栽植臂通过凸轮驱动杠杆摆臂,杠杆摆臂带动组合式伸缩秧爪压缩弹簧实现秧爪的伸缩,与固定的组合式挡秧器产生相对运动。取秧、分秧、运秧时秧爪伸出,摆栽时秧苗根部入土达到要求的深度后秧爪迅速缩回,从而实现水稻秧苗的摆栽。回程时,秧爪慢慢伸出。
发明内容
针对现有技术中存在的缺陷,本发明的目的在于提供一种水稻秧苗浅植摆栽方法及秧爪缩回式栽植臂。
为达到以上目的,本发明采取的技术方案是:
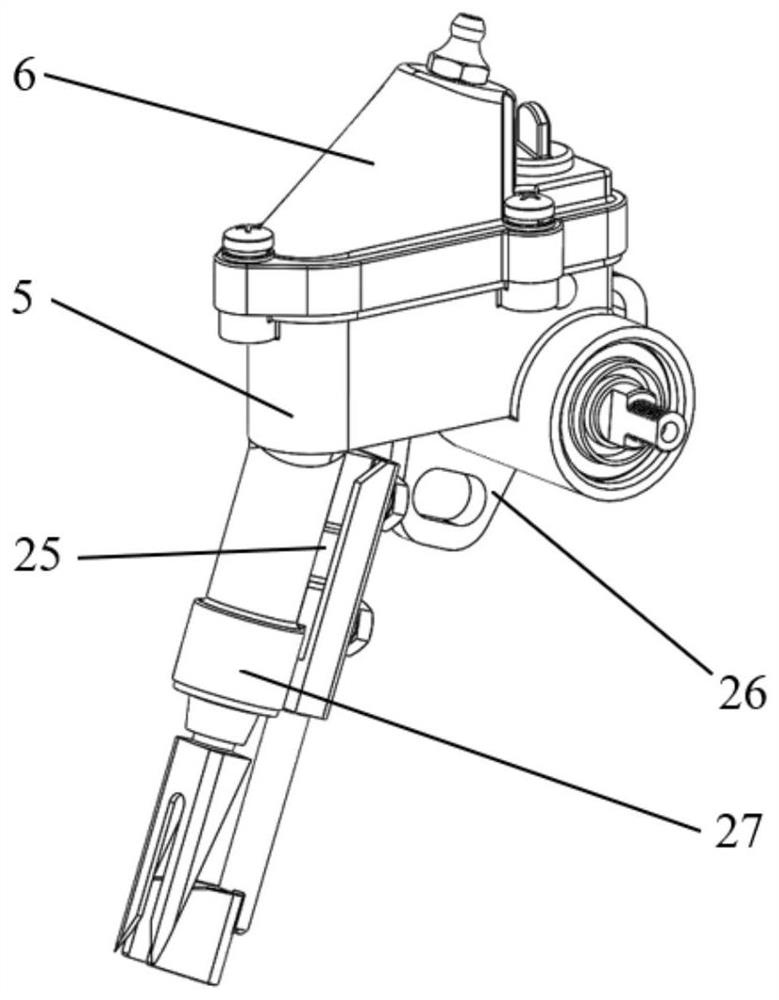
一种秧爪缩回式栽植臂包括:栽植臂机构、组合式伸缩秧爪7、组合式挡秧器10、弹簧14、弹簧挡圈15、连接座26和挡秧杆底座25;
所述秧爪缩回式栽植臂通过连接座26与回转箱的行星轮固连;
所述栽植臂机构包括:凸轮机构、栽植臂壳体5、栽植臂盖6、锥形润滑油嘴21、油管插头20、深沟球轴承23、衬套27、防尘油封22和轴承透盖24,所述凸轮机构包括:杠杆摆臂17和凸轮轴18;
栽植臂盖6通过螺钉与移栽臂壳体5连接,栽植臂盖6的顶部设有锥形润滑油嘴21,所述油管插头20位于锥形润滑油嘴21后方,并安装于移栽臂壳体5上;凸轮轴18安装在移栽臂壳体5内并与回转箱固连,凸轮轴18上装有深沟球轴承23,所述深沟球轴承23的端面上设有轴承透盖24;
杠杆摆臂17左端通过链条固定座16与组合式伸缩秧爪7的上端相连,杠杆摆臂17右部通过销轴19安装于栽植臂壳体5上,杠杆摆臂17的顶端与凸轮轴18接触;
所述插植臂壳体5的后方设置有挡秧杆底座25,所述组合式挡秧器10固装在挡秧杆底座25上;
组合式伸缩秧爪7位于插植臂壳体5内,并与组合式挡秧器10平行安装,所述弹簧挡圈15安装在组合式伸缩秧爪7的末端,弹簧14安装在组合式伸缩秧爪7上,弹簧14一端支撑在插植臂壳体5上,另一端支撑在弹簧挡圈15上;
所述栽植臂壳体5的前端设有衬套27,所述防尘油封22安装于衬套27内。
在上述方案的基础上,所述组合式伸缩秧爪7包括:秧爪8和秧爪轴9,所述秧爪8焊接与秧爪轴9上,所述秧爪8上设置有两爪尖,两爪尖呈八字口并倒尖,所述秧爪轴9末端设有螺纹和销轴孔。
在上述方案的基础上,所述组合式挡秧器10包括:挡秧片11、挡秧器轴13和固定板12,所述挡秧片11焊接于挡秧器轴13上,所述挡秧器轴13焊接于固定板12上。
在上述方案的基础上,所述挡秧片11为不规则梯形,所述固定板12上设有两个圆孔,通过两个螺栓固装在插植臂壳体5下方的挡秧杆底座25上。
在上述方案的基础上,所述杠杆摆臂17的左端通过链条固定座16与秧爪轴9末端设置的销轴孔连接,所述弹簧挡圈15安装在秧爪轴9的末端设有的螺纹上。
在上述方案的基础上,所述挡秧片11与秧爪8的间隙小于0.1mm,以免中间夹秧苗1或杂草等物。
在上述方案的基础上,所述凸轮轴18为凸轮和轴一体式,凸轮转角分为近休止角、推程运动角、远休止角约和回程运动角,其中回程运动角为0°,为急回凹部28,杠杆摆臂17的顶端能够沿凸轮的轮廓曲线移动实现急回运动:当杠杆摆臂17的顶端由凸轮远休止角的轮廓曲线移动到回程运动角的轮廓曲线时,由于回程运动角为0°,在弹簧力作用下凸轮机构急回。
一种水稻秧苗浅植摆栽方法应用上述秧爪缩回式栽植臂,包括如下阶段:取秧、分秧、运秧阶段;摆栽阶段和回程阶段;
取秧、分秧、运秧阶段:杠杆摆臂17的顶端与凸轮的接触点位于凸轮远休止角的轮廓曲线上,弹簧14处于压缩状态,组合式伸缩秧爪7处于伸出状态,挡秧片11与秧爪8的端部保持一定距离,相对静止;
摆栽阶段:稻田保持水层2深度为1.5-2.0cm,根据秧苗1的类型分为以下两种情况:
(1)摆栽钵体毯状苗时,为了保证秧苗1的直立性,秧爪8与泥浆层3所在水平面成60°-85°夹角,秧爪8和挡秧片11不入土,秧爪8将秧苗1的钵体4按入泥浆层3中;当秧苗1的钵体4到达要求深度时,秧爪8爪尖至泥浆层3的距离为钵体4上表面至泥浆层3的距离;杠杆摆臂17的顶端与凸轮的接触点由凸轮远休止角的轮廓曲线移动到回程运动角的轮廓曲线,由于回程运动角为0°,凸轮机构急回,弹簧14被松开,弹簧力推动弹簧挡圈15把秧爪8迅速缩回,直至秧爪8的端部与挡秧片11齐平,挡秧片11将秧苗1从秧爪8上脱下;
(2)摆栽普通毯状苗时,为了保证秧苗1的直立性,秧爪8与泥浆层3所在水平面成60°-85°夹角,秧爪8插入泥浆层3,此时秧爪8将秧苗1的根部按入泥浆层3中,当秧苗1的根部到达要求深度时,杠杆摆臂17的顶端与凸轮的接触点由凸轮远休止角的轮廓曲线移动到回程运动角的轮廓曲线,由于回程运动角为0°,凸轮机构急回,弹簧14被松开,弹簧力推动弹簧挡圈15把秧爪8迅速缩回,直至秧爪8的端部与挡秧片11齐平,挡秧片11将秧苗1从秧爪8上脱下;
回程阶段:为了防止秧爪8带回已摆栽的秧苗1,在回程初期,秧爪8先不伸出,与挡秧片11保持静止,此时杠杆摆臂17的顶端与凸轮的接触点处于凸轮近休止角的轮廓曲线。当秧爪缩回式栽植臂上升到一定高度时,杠杆摆臂17的顶端与凸轮的接触点由凸轮近休止角的轮廓曲线移动到推程运动角的轮廓曲线,杠杆摆臂17带动与其通过链条固定座16连接的秧爪轴9,安装在秧爪轴9上的弹簧挡圈15开始压缩弹簧14,组合式伸缩秧爪7逐渐伸出,杠杆摆臂17的顶端与凸轮的接触点到达凸轮远休止角的轮廓曲线时,挡秧片11与秧爪8的端部的距离逐渐拉大直到原有距离;
组合式伸缩秧爪7与组合式挡秧器10产生相对运动,交错进行,每摆栽一次完成一个循环周期。
在上述方案的基础上,摆栽钵体毯状苗时,钵体毯状苗种植深度小于钵体4高度的2/3;摆栽普通毯状苗时,普通毯状苗种植深度在0.5-2cm。
在上述方案的基础上,所述取秧、分秧、运秧阶段,挡秧片11与秧爪8的端部保持18-20mm的距离;所述回程阶段,挡秧片11与秧爪8的端部的距离逐渐拉大直到18-20mm的距离;
本方法不仅实现了水稻秧苗的浅植,而且在摆栽钵体毯状苗时避免了传统机插秧秧爪插入土壤产生的插孔开口和推秧杆推秧产生的土壤凹坑,在摆栽普通毯状苗时避免了传统机插秧推秧杆推秧产生的凹坑。
分插机构工作时通过回转箱将动力传递给栽植臂,组合式伸缩秧爪7与组合式挡秧器10产生相对运动,交错进行,每摆栽一次完成一个循环,组合式伸缩秧爪7的这个运动通过凸轮轴18、杠杆摆臂17和弹簧14来实现。当凸轮轴18的凸起部分顶起杠杆摆臂17的顶端,杠杆摆臂17的另一端往下带动秧爪轴9,弹簧14慢慢产生压缩,秧爪8逐渐伸出,秧爪8的爪尖与挡秧片11拉开一段18-20mm的距离,为所取秧苗留下空间,然后保持相对静止。当凸轮的急回凹部28对准杠杆摆臂17的顶端时,杠杆摆臂17的顶端与凸轮瞬间产生间隙,弹簧14被松开,弹簧力推动弹簧挡圈15把秧爪8迅速缩回,这时秧爪8的爪尖与挡秧片11齐平,挡秧片11将秧苗1从秧爪8脱下。
本发明的有益效果:
本发明主要由水稻秧苗浅植摆栽方法及秧爪缩回式栽植臂组成,实现了水稻秧苗的浅植,符合水稻农艺生产要求,在摆栽钵体毯状苗时避免了传统机插秧秧爪插入土壤产生的插孔开口和推秧杆推秧产生的土壤凹坑,在摆栽普通毯状苗时避免了传统机插秧推秧杆推秧产生的凹坑,保证了秧苗摆栽后的直立度,避免因此造成的秧苗漂秧和倒秧,提高水稻的产量。
本发明所述栽植臂适应采用前插方式的乘坐式插秧机,更换原插秧机的插植臂,可以实现水稻秧苗浅植摆栽,避免了新技术推广造成现有装备的闲置和浪费问题。
附图说明
本发明有如下附图:
图1是本发明的栽植臂三维示意图;
图2是本发明的栽植臂剖视三维示意图;
图3是本发明的组合式伸缩秧爪三维示意图;
图4是本发明的组合式挡秧器三维示意图;
图5是本发明的凸轮轴三维示意图;
图6是本发明的杠杆摆臂三维示意图;
图7是本发明的摆栽阶段秧苗钵体入土三维示意图;
图8是本发明的摆栽阶段秧爪缩回脱秧三维示意图;
附图标记:
1、秧苗,2、水层,3、泥浆层,4、钵体,5、栽植臂壳体,6、栽植臂盖,7、组合式伸缩秧爪,8、秧爪,9、秧爪轴,10、组合式挡秧器,11、挡秧片,12、固定板,13、挡秧杆轴,14、弹簧,15、弹簧挡圈,16、链条固定座,17、杠杆摆臂,18、凸轮轴,19、销轴,20、油管插头,21、锥形润滑油嘴,22、防尘油封、23、深沟球轴承,24、轴承透盖,25、挡秧杆底座,26、连接座,27、衬套,28、急回凹部
具体实施方式
以下结合附图1~8对本发明作进一步详细说明。
本发明的目的是提供一种水稻秧苗浅植摆栽方法及秧爪缩回式栽植臂,可以对水稻秧苗进行浅植,在摆栽钵体毯状苗时避免了传统机插秧秧爪插入土壤产生的插孔开口和推秧杆推秧产生的土壤凹坑,在摆栽普通毯状苗时避免了传统机插秧推秧杆推秧产生的凹坑,
一种水稻秧苗浅植摆栽方法及秧爪缩回式栽植臂适用不同类型的水稻秧苗栽植,在以下工作过程中以水稻大钵体毯状苗为例进行详细的描述。
摆栽前稻田保持水层2为1.5-2.0cm,根据水稻大钵体毯状苗育秧盘尺寸和覆土厚度,大钵体毯状苗的钵体4高度为1.9-2.3cm,种植深度小于钵体4高度的2/3,所以钵体4入土深度为0-1.5cm。
运用本发明的水稻秧苗浅植摆栽方法,包括:取秧、分秧、运秧阶段;摆栽阶段和回程阶段。
秧爪缩回式栽植臂工作时,回转箱将动力传递给秧爪缩回式栽植臂,秧爪缩回式栽植臂随着与其固连的回转箱的行星轮转动并绕太阳轮公转,凸轮轴18安装在栽植臂壳体5内并与回转箱固连,栽植臂绕着凸轮轴18转动,杠杆摆臂17的顶端与凸轮的接触点沿着凸轮的轮廓曲线移动。
取秧、分秧、运秧阶段时,杠杆摆臂17的顶端与凸轮的接触点位于凸轮远休止角的轮廓曲线上,弹簧14处于压缩状态,组合式伸缩秧爪7处于伸出状态,挡秧片11与秧爪8的爪尖保持18-20mm距离,相对静止。
摆栽阶段时,杠杆摆臂17的顶端与凸轮的接触点先处于凸轮远休止角的轮廓曲线。为了保证秧苗1的直立性,秧爪8与泥浆层3所在水平面成60°-85°夹角,爪尖到泥浆层3的距离为0.8-2.3cm时停止向下运动,具体距离可以通过调节插秧机的插植深度调节装置实现,秧爪8和挡秧片11不入土,此时秧爪8将钵体4按入泥浆层3中。当钵体4到达要求深度时,杠杆摆臂17的顶端与凸轮的接触点由凸轮远休止角的轮廓曲线移动到回程运动角的轮廓曲线,由于回程运动角为0°,凸轮机构急回,弹簧14被松开,弹簧力推动弹簧挡圈15把秧爪8迅速缩回,直至秧爪8的爪尖与挡秧片11齐平,挡秧片11将秧苗1从秧爪8上脱下。
回程阶段时,为了防止秧爪8带回已摆栽的秧苗1,在回程初期,秧爪8先不伸出,与挡秧片11保持静止,此时杠杆摆臂17的顶端与凸轮的接触点处于凸轮近休止角的轮廓曲线。当秧爪缩回式栽植臂上升到一定高度时,杠杆摆臂17的顶端与凸轮的接触点由凸轮近休止角的轮廓曲线移动到推程运动角的轮廓曲线,杠杆摆臂17带动与其通过链条固定座16连接的秧爪轴9,安装在秧爪轴9上的弹簧挡圈15开始压缩弹簧14,组合式伸缩秧爪7逐渐伸出,杠杆摆臂17的顶端与凸轮的接触点到达凸轮远休止角的轮廓曲线时,挡秧片11与秧爪8的爪尖的距离拉大到18-20mm距离。
组合式伸缩秧爪7与组合式挡秧器10产生相对运动,交错进行,每摆栽一次完成一个循环周期。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
- 一种水稻秧苗浅植摆栽方法及秧爪缩回式栽植臂
- 一种水稻秧苗浅植摆栽方法及秧爪缩回式栽植臂