双凸极永磁电机控制方法
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及电机控制技术领域,尤其涉及一种双凸极永磁电机控制方法。
背景技术
双凸极永磁电机最早在20世纪90年代被提出,其具有结构简单、制造成本低、单位体积密度高、转矩电流比高和效率高等优点,在工业领域得到广泛的应用。
然而由于此种电机特殊的双凸极结构,导致电机在凸极面重合区域存在边缘磁场效应和气隙磁场能量突变,且当转子经过换相点时,电磁转矩明显降低,从而使合成的转矩波动较大,因此会产生一定的转矩脉动和噪声。另外,由于外界环境变化也可能会导致电机内部的参数发生变化,从而降低电机控制系统的鲁棒性。
发明内容
本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的一个目的在于提供一种双凸极永磁电机控制方法,该方法可有效降低双凸极永磁电机的转矩脉动和噪声,减少对电机传动轴以及外界环境的影响,提高电机控制系统的鲁棒性。
为达到上述目的,本发明通过以下技术方案实现:
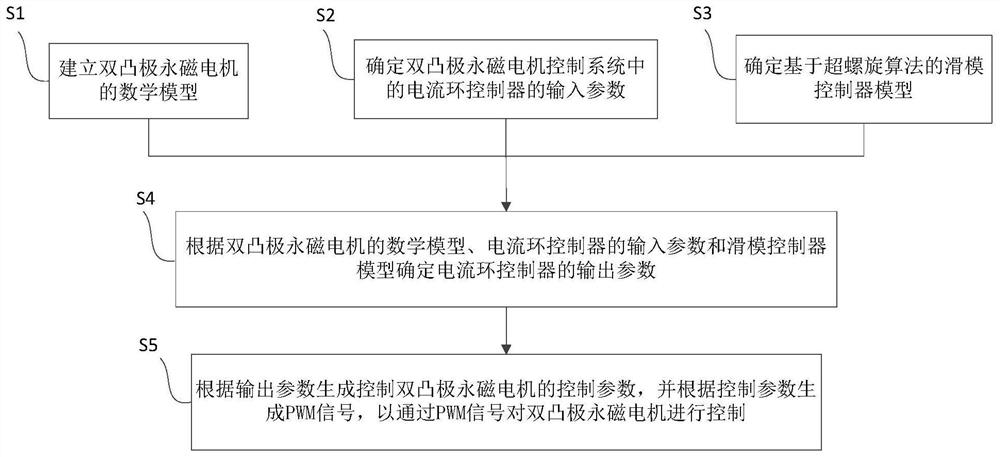
一种双凸极永磁电机控制方法,所述控制方法应用于双凸极永磁电机控制系统,所述控制方法包括:建立所述双凸极永磁电机的数学模型;确定双凸极永磁电机控制系统中的电流环控制器的输入参数;确定基于超螺旋算法的滑模控制器模型;根据所述双凸极永磁电机的所述数学模型、所述电流环控制器的所述输入参数和所述滑模控制器模型确定所述电流环控制器的输出参数;根据所述输出参数生成控制所述双凸极永磁电机的控制参数,并根据所述控制参数生成PWM(Pulse Width Modulation,脉冲宽度调制)信号,以通过所述PWM信号对所述双凸极永磁电机进行控制。
可选地,所述建立双凸极永磁电机的数学模型的步骤包括:建立所述双凸极永磁电机在dq坐标系下的三相定子绕组上的自感和互感数学模型;根据所述dq坐标系下的三相定子绕组上的自感和互感数学模型建立所述双凸极永磁电机在dq坐标系下的定子磁链方程和定子电压方程。
可选地,双凸极永磁电机在dq坐标系下的三相定子绕组上的自感和互感数学模型如下:
其中,L
可选地,所述双凸极永磁电机在dq坐标系下的定子磁链方程如下:
其中,
所述双凸极永磁电机在dq坐标系下的定子电压方程如下:
其中,u
可选地,所述确定双凸极永磁电机控制系统中的电流环控制器的输入参数的步骤包括:通过所述双凸极永磁电机控制系统中的转速反馈模块获取所述双凸极永磁电机的实际转速;获取所述双凸极永磁电机的参考转速,并计算所述参考转速与所述实际转速之间的误差,然后根据所述误差通过双凸极永磁电机控制系统中的PI(ProportionIntegration,比例积分)控制器确定所述双凸极永磁电机的参考电磁转矩;所述转矩电流计算模块根据所述参考电磁转矩确定出所述双凸极永磁电机控制系统中的电流环控制器的参考电流,并将所述参考电流作为第一输入参数;通过所述双凸极永磁电机控制系统中的电流反馈模块获取所述双凸极永磁电机的实际输出三相电流值,将所述三相电流值经过Park变换得到所述双凸极永磁电机在dq坐标系下的d轴参考电流和q轴参考电流,并将所述d轴参考电流和所述q轴参考电流作为第二输入参数。
可选地,所述确定基于超螺旋算法的滑模控制器模型的步骤包括:确定自适应增益函数,并根据所述自适应函数确定所述滑模控制器模型的双凸极永磁电机控制系统输入参数;建立滑模变量和滑模面函数;根据所述双凸极永磁电机控制系统输入参数、所述滑模变量和所述滑模面函数确定所述滑模控制器模型。
可选地,所述建立滑模面函数的步骤包括:定义双凸极永磁电机控制系统状态变量;根据所述双凸极永磁电机控制系统状态变量确定得到所述滑模面函数。
可选地,所述电流环控制器的输出参数为所述双凸极永磁电机在dq坐标系下的定子d轴电压和q轴电压。
可选地,所述控制所述双凸极永磁电机的控制参数为所述双凸极永磁电机在ABC坐标系下的三相输出电压。
本发明至少具有以下技术效果:
(1)本发明提出的基于超螺旋算法的双凸极永磁电机控制方法可提高双凸极永磁电机的响应速度,转速的超调量较小,在一定程度上能够减少双凸极永磁电机的转矩脉动以及噪声,相对于PI控制和传统的滑模控制方法具有更好的控制效果;
(2)本发明将自适应率用于计算超螺旋滑模控制方法中的增益函数,通过对增益函数的实时调整,可以匹配控制系统中双凸极永磁电机的参数变化或其它不确定性干扰等,从而提高系统的鲁棒性,以达到更好的控制精度。
本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
图1为根据本发明一实施例的基于自适应超螺旋滑模算法的双凸极永磁电机控制方法的流程图;
图2为根据本发明一实施例的基于自适应超螺旋滑模算法的双凸极永磁电机控制示意图;
图3为根据本发明一实施例的确定基于超螺旋算法的滑模控制器模型示意图;
图4-图7为根据本发明一实施例的基于自适应超螺旋滑模算法的双凸极永磁电机控制方法的仿真实验图。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
下面参考附图描述本实施例的双凸极永磁电机控制方法。图1为双凸极永磁电机控制方法的流程图。参考图1所示,本实施例提供的一种双凸极永磁电机控制方法应用于双凸极永磁电机控制系统,该控制方法包括:
步骤S1,建立双凸极永磁电机的数学模型。
其中,建立双凸极永磁电机的数学模型的步骤包括:
步骤S11,建立双凸极永磁电机在dq坐标系下的三相定子绕组上的自感和互感数学模型。所述dq坐标系为直轴d轴和交轴q轴构建的旋转坐标系,该坐标系上的电信号可以描述为常数,从而可用于双凸极永磁电机运行的简化分析。
步骤S12,根据dq坐标系下的三相定子绕组上的自感和互感数学模型建立双凸极永磁电机在dq坐标系下的定子磁链方程和定子电压方程。
需要说明的是,本实施例在建立双凸极永磁电机在dq坐标系下的三相定子绕组上的自感和互感数学模型之前,还可建立双凸极永磁电机在ABC坐标系下的三相定子绕组上自感、互感的数学模型和双凸极永磁电机在ABC坐标系下的定子磁链方程、定子电压方程。所述ABC坐标系为三相静止坐标系,由A相、B相和C相各坐标轴构成,所述A相、B相和C相之间依次滞后120度。
由于与基波数值相比,电感二阶及以上的傅里叶项数值较小,为了简化模型可忽略不计。本实施例中双凸极永磁电机在ABC坐标系下的三相定子绕组上自感和互感的数学模型如下:
其中,L
然后根据双凸极永磁电机在ABC坐标系下的三相定子绕组上自感和互感的数学模型建立双凸极永磁电机在ABC坐标系下的定子磁链方程和定子电压方程。
其中,定子磁链方程表示如下:
其中,
定子电压方程表示如下:
其中,u
进一步地,双凸极永磁电机在dq坐标系下的三相定子绕组上自感和互感的数学模型表示如下:
其中,L
然后根据双凸极永磁电机在dq坐标系下的三相定子绕组上自感和互感的数学模型计算得到双凸极永磁电机在dq坐标系下的定子磁链方程和定子电压方程。
其中,定子磁链方程表示如下:
其中,
定子电压方程表示如下:
其中,u
步骤S2,确定双凸极永磁电机控制系统中的电流环控制器的输入参数。
其中,双凸极永磁电机控制系统包括转速反馈模块、PI控制器、转矩电流计算模块和电流反馈模块,所述转速反馈模块与PI控制器连接,所述PI控制器与转矩电流计算模块连接,所述转矩电流计算模块和电流反馈模块均与电流环控制器连接,所述确定双凸极永磁电机控制系统中的电流环控制器的输入参数的步骤包括:
步骤S21,通过双凸极永磁电机控制系统中的转速反馈模块获取双凸极永磁电机的实际转速。
步骤S22,获取双凸极永磁电机的参考转速,计算该参考转速与实际转速之间的误差,然后根据该误差通过双凸极永磁电机控制系统中的PI控制器确定双凸极永磁电机的参考电磁转矩。
步骤S23,转矩电流计算模块根据参考电磁转矩确定出双凸极永磁电机控制系统中的电流环控制器的参考电流,并将该参考电流作为第一输入参数。
步骤S24,通过双凸极永磁电机控制系统中的电流反馈模块获取双凸极永磁电机的实际输出三相电流值,将该三相电流值经过Park变换得到双凸极永磁电机在dq坐标系下的d轴参考电流和q轴参考电流,并将d轴参考电流和q轴参考电流作为第二输入参数。
如图2所示,可获取双凸极永磁电机的参考转速ω
进一步地,通过电流反馈模块获取双凸极永磁电机实际的输出电流值i
然后将实际电流i
步骤S3,确定基于超螺旋算法的滑模控制器模型。
其中,确定基于超螺旋算法的滑模控制器模型的步骤包括:
步骤S31,确定自适应增益函数,并根据自适应函数确定滑模控制器模型的双凸极永磁电机控制系统输入参数。
具体地,可设计自适应控制率来确定自适应增益函数。为了解决系统内部参数不确定或外部扰动带来的不确定性干扰问题,根据自适应控制理论设计自适应增益函数,实时调整控制律参数,匹配系统不确定性干扰。自适应增益函数α和β分别满足:
其中,σ、ε和γ
进一步地,根据自适应增益函数确定滑模控制器模型的系统输入参数u,具体如下:
其中,u1和u2为系统的输入变量,
其中,Δ为边界层。
步骤S32,建立滑模变量和滑模面函数。
具体地,为了使双凸极永磁电机控制系统在滑动阶段具有更佳的动态品质,尽可能的提高控制精度和收敛速度,可建立一个合理的滑模变量s(x,t)即上述s,其导数形式如下:
其中,
进一步地,建立滑模面函数的步骤包括:
步骤S321,定义两个双凸极永磁电机控制系统状态变量。
步骤S322,根据该两个系统状态变量建立得到滑模面函数。
具体地,如图3所示,可定义含有积分项的系统状态变量:
其中,x
x
然后,基于公式(14)建立的滑模面函数如下:
s=cx
其中,c是正实数。s的导数形式为:
需要说明的是,为了使双凸极永磁电机控制系统具有全局鲁棒性,即使双凸极永磁电机控制系统在初始时刻(t=0)避免趋近阶段,直接移动到滑模面(s=0),设定一个积分初始值:
其中,x
步骤S33,根据双凸极永磁电机控制系统输入参数、滑模变量和滑模面函数确定滑模控制器模型。
具体地,可结合式(10)、(11)、(13)和(17)求解出基于超螺旋算法的滑模控制器模型参数:
由此可得到基于超螺旋算法的滑模控制器模型。
步骤S4,根据双凸极永磁电机的数学模型、电流环控制器的输入参数和滑模控制器模型确定电流环控制器的输出参数。
步骤S5,根据输出参数生成控制双凸极永磁电机的控制参数,并根据控制参数生成PWM信号,以通过PWM信号对双凸极永磁电机进行控制。
其中,电流环控制器的输出参数为双凸极永磁电机在dq坐标系下的定子d轴电压和q轴电压,控制双凸极永磁电机的控制参数为双凸极永磁电机在ABC坐标系下的三相输出电压。
具体地,可根据双凸极永磁电机的定子电压方程即公式(8)所示的定子电压与电流之间的关系、电流环控制器的输入参数即实际电流与参考电流,以及滑模控制器模型确定电流环控制器的输出参数即dq坐标系下的定子d轴电压u
作为一个示例,将dq轴第一输入参数和第二输入参数即参考电流和实际电流输入至电流环控制器中的滑模控制模型得到dq轴电流状态变量即对应的
可选地,可将定子d轴电压和q轴电压u
如图2所示,在获取双凸极永磁电机控制系统的控制参数即在ABC三相静止坐标系下的输出电压u
根据本发明实施例的双凸极永磁电机控制方法,该方法可有效降低该种电机的转矩脉动和噪声,减少对电机传动轴以及外界环境的影响,提高电机控制系统的鲁棒性。
另外,为证明双凸极永磁电机控制系统在自适应超螺旋滑模控制算法下的稳定性,本实施例还提供了相应的证明方法,其过程包括以下步骤:
步骤T1,定义新的状态向量z、z
其中,
然后选取如下的Lyapunov(李亚普洛夫)备选函数:
其中,P为正定对称矩阵,α和β为自适应增益函数,α
进一步分解备选函数V(z,α,β),令:
其中,
步骤T2,根据公式(22)、(24)得到V(z,α,β)的导数为:
式中,对任意的t≥0,有:α-α
进一步地,根据式(23),可得V
其中,A为一矩阵,Q为正定矩阵,且满足:
其中,φ、ε均为正实数;令
进一步地,由式(25)可得:
其中,
步骤T3,结合式(25)、(28)、(29),可得:
然后构造变量ρ,其定义如下:
当变量ρ为0时,对于任意时刻t(t≥0),只要控制律参数α和β满足式(10)所示的自适应律,则有:
进一步地,基于Lyapunov稳定性理论,双凸极永磁电机控制系统可在有限时间内收敛到滑模面,双凸极永磁电机控制系统在自适应超螺旋滑模算法下的稳定性得证。
为了便于分析、验证本发明所提出的双凸极永磁电机控制方法的有效性,在MATLAB(一种商业数学软件)软件中进行仿真实验。在仿真中,电流环控制器的参数选取如下:σ=5000,γ
本实施例采用48/64齿双凸极永磁电机,额定转速为50r/min,额定功率约为10kW。通过傅里叶变换可知,电机的自感或永磁磁链二阶及以上的傅里叶项数值相对于基波数值来说较小。因此,为了简化模型可忽略不计。仿真实验采用的电机参数如表1所示:
表1 48/64齿双凸极永磁电机的参数
具体仿真实验结果如图4、图5、图6和图7所示。
由图4和图5可知,在本实施例提出的基于自适应超螺旋滑模算法的电流环控制器作用下,双凸极永磁电机的实际转速能够较好地跟踪给定转速,超调量较小,且双凸极永磁电机的电磁转矩脉动较小,从而验证了该控制方法具有较好的控制精度,在一定程度上可减少转矩脉动。
由图6和图7可知,在本实施例提出的基于自适应超螺旋滑模算法的电流环控制器作用下,改变双凸极永磁电机的参数(自感L
应当理解,本实施例的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,多个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。例如,如果用硬件来实现,与在另一实施方式中一样,可用本领域公知的下列技术中的任一项或它们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(PGA),现场可编程门阵列(FPGA)等。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 带辅助凸极的定子表面贴装式双凸极永磁电机
- 双凸极永磁电机控制方法