一种DFIG网侧变换器电流跟踪非线性控制方法及其控制系统
文献发布时间:2023-06-19 11:39:06
技术领域
本发明一种DFIG网侧变换器电流跟踪非线性控制方法及其控制系统,属于双馈风力发电机网侧变换器电流跟踪非线性控制技术领域。
背景技术
随着近年来风能设施的进步,风能作为可再生能源,愈来愈具有经济竞争力和发展潜力。而目前主流的风电机组通常采用变速恒频机组,以双馈异步发电机组为主,其定子直接挂接电网,转子通过三相交—直—交变换器实现交流励磁,可以通过定子、转子双通道实现电功率的交换。转子励磁变换器常采用背靠背三相两电平电压型PWM变换器,两PWM变换器按照其所在位置可分别为网侧变换器和转子侧变换器。若电网发生不对称故障时,网侧将出现二倍频交流量,最终将会传递至转子侧,严重危害DFIG风电机组的机械系统安全,故在DFIG系统中,对网侧变换器的控制是如今研究的焦点问题。
目前网侧变换器的控制通常采用同步旋转坐标系下双环级联PI控制。在PI控制器下,网侧变换器的控制虽然容易实现,但动态性能不是很理想,其中电流电压很难进行快速跟踪,想要达到理想的控制效果非常困难。因此,本申请提出了一种DFIG网侧变换器电流跟踪非线性控制方法及其控制系统。
发明内容
本发明为了克服现有技术中存在的不足,所要解决的技术问题为:提供一种DFIG网侧变换器电流跟踪非线性控制方法的改进及其硬件结构的改进。
为了解决上述技术问题,本发明采用的技术方案为:一种DFIG网侧变换器电流跟踪非线性控制方法,包括如下步骤:
步骤一:对DFIG网侧变换器进行数学建模:将DFIG网侧变换器的非线性过程用状态方程表示,建立其数学模型;
步骤二:采用滑模控制器实现网侧变换器电压外环控制:选取合适的滑模面,建立符合李雅普诺夫稳定性的滑模控制器,实现电压外环控制;
步骤三:采用反馈线性化实现网侧变换器电流内环控制:在满足反馈线性化条件下,对 DFIG网侧变换器数学模型进行反馈线性化解耦,实现电流跟踪控制,完成闭环控制过程。
所述步骤一建立数学模型的具体步骤为:
步骤1.1:建立DFIG网侧变换器的三相静止abc数学模型,其表达式如下:
上式中:u
为网侧变换器的开关函数;
步骤1.2:通过坐标变换将网侧变换器三相静止abc数学模型转换得到两相静止αβ坐标系下的数学模型,转换关系如下:
所述步骤二采用滑模控制器实现网侧变换器电压外环控制的具体步骤为:
步骤2.1:选取滑模面函数:S=u
上式中:u
步骤2.2:选择指数趋近律
步骤2.3:当系统稳定时,系统的直流母线电压u
根据直流母线电压与功率关系,可得内环有功功率与直流母线电压关系为:
根据上述计算公式可得网侧变换器直流母线电压外环的控制方程为:
P=(C[k
所述步骤三采用反馈线性化实现网侧变换器电流内环控制的具体步骤如下:
步骤3.1:根据两相静止αβ坐标系下的数学模型选取状态变量x=[x
上式中:
步骤3.2:所述二输入二输出仿射非线性模型的系统相对阶的计算:
当y
当y
通过下式判断系统阶数B(x)为非奇异的:
步骤3.3:根据步骤3.2计算系统相对阶γ=γ
上式中:A(x)
根据步骤3.3得出网侧变换器调制所需的合成期望电压为:
一种DFIG网侧变换器电流跟踪非线性控制系统,至少包括交流配电网、网侧变换器、滤波电容、转子侧变换器,所述交流配电网的输出端通过导线与变压器的输入端相连,所述变压器的输出端通过导线与网侧变换器的交流侧相连,所述网侧变换器的直流侧通过导线与转子侧变换器相连;
所述网侧变换器的交流侧设置有电压检测模块,所述控制系统运行时,网侧变换器输出的直流电压通过滑模控制模块进行调节后,输入反馈线性化控制模块进行电流跟踪,最后通过SVPWM模块,控制网侧变换器实现功率因数控制。
所述滑模控制模块包括用于网侧变换器电压外环控制的滑模控制器;
所述反馈线性化控制模块包括用于网侧变换器的电流内环控制器。
本发明相对于现有技术具备的有益效果为:本发明提供的DFIG网侧变换器电流跟踪的非线性控制方法,无需电网电压定向,减少了旋转因子带来的耦合项的引入,避免出现与传统PI相同的复杂结构,实现了反馈线性化快速解耦;同时对电压外环采用含饱和函数的电压滑模控制,进一步提高动态性能,以实现网侧功率因数控制以及电压稳定。
附图说明
下面结合附图对本发明做进一步说明:
图1为本发明的网侧变换器结构框图;
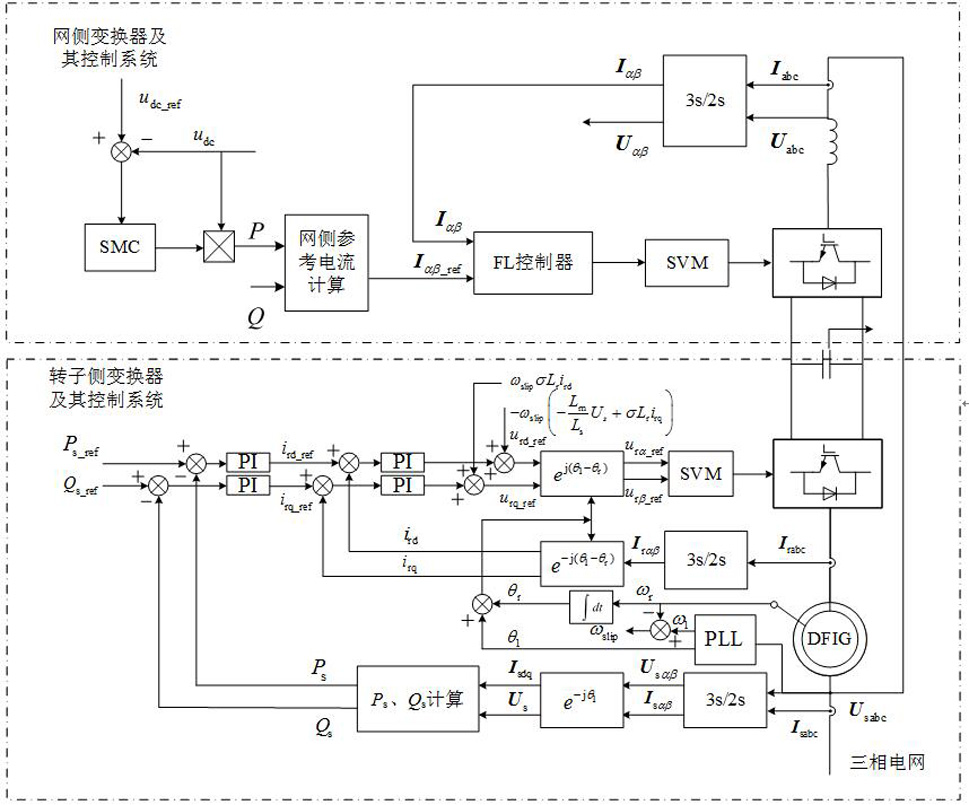
图2为本发明的DFIG网侧、转子侧变换器联合控制原理图;
图3、图4为本发明非线性控制下的网侧参考电流和实际电流仿真结果示意图;
图5为采用传统双环级联PI控制与本发明的非线性控制下的网侧电流对比仿真示意图;
图6为本发明三相输入电压、网侧电流仿真示意图;
图7为采用传统双环级联PI控制下的直流母线电压仿真示意图;
图8为采用本发明的非线性控制下直流母线电压仿真示意图。
具体实施方式
如图1至图8所示,本发明提供的DFIG网侧变换器电流跟踪的非线性控制系统,至少包含交流配电网、网侧变换器、滤波电容、转子侧变换器。控制系统中变压器线路与交流配电网相连,网侧变换器交流侧与变压器相连,直流侧与转子侧变换器相连;线路包括电压检测模块、滑模控制模块、反馈线性化模块、SVPWM模块,控制系统运行时,网侧变换器输出直流电压,通过滑模控制模块进行调节后,输入反馈线性化控制模块进行电流跟踪,最后通过SVPWM模块,控制网侧变换器实现功率因数控制。
本发明提供的DFIG网侧变换器电流跟踪的非线性控制方法,其所述方法具体展开如下:首先,在如图1所示基础上,建立DFIG网侧变换器ab
上式中:u
通过坐标变换将网侧变换器三相静止abc数学模型转换得到两相静止αβ坐标系下的数学模型,如下:
本发明的DFIG网侧变换器电流跟踪的非线性控制方法,需要同时设计两类控制器,电压外环控制器和电流内环控制器。其中,网侧变换器电压外环控制器采用滑模控制器,具体设计如下:
1.选取滑模面函数:S=u
通过选择合适的指数趋近律来限定滑模控制趋近阶段的运动轨迹以保证系统趋近运动的动态品质。由于系统在滑模面可能出现高频抖动,本发明选用饱和函数sat(S)替换传统的sgn(S)来削弱其高频抖动,则指数趋近律为下式:
上式中:k
当系统稳定时,系统的直流母线电压u
将式(6)代入式(3)可得:
又由直流母线电压与功率关系,可得内环有功功率与直流母线电压关系为:
结合式(4)、式(7)以及式(8),可得网侧变换器直流母线电压外环的控制方程为:
P=(C[k
2.判断上述滑模控制是否满足李雅普诺夫稳定性:
定义李雅普诺夫函数:
对式(10)求导,可得:
当|S|>ε时,有sat(S)=sgn(S)(12);
将式(12)代入到式(11),可得:
因为k
当|S|≤ε时,有
将式(14)代入到式(11),可得:
显然,式(15)中
则S在空间内,都有
3.根据两相静止αβ坐标系下的数学模型,选取状态变量x=[x
上式中:
4.上述二输入二输出仿射非线性模型的系统相对阶:
对于y
同理,对于y
通过下式判断系统阶数B(x)为非奇异的:
由式(17)和(18)初步判断γ
5.满足上述系统相对阶下确定反馈控制律:
由于
则
即
由式(22)可得FL(反馈线性化)控制律:
上式中,A(x)
通过FL控制律式(23),可得输出与新的输入关系为:
为了实现跟踪控制,新的输入由下式确定:
上式中:
y
其误差动态方程为:
通过确定式(26)的极点在复平面的左半平面,可计算出k
把式(25)代入式(23)可得:
又因为u
本发明的网侧变换器控制框图如图2所示。
下面结合仿真对本发明的应用效果作详细的描述。本发明实例基于MATLAB/simulink 仿真平台搭建,建立网侧变换器仿真模型,其参数满足上述要求,变压器输出线电压 190V/50Hz;交流侧滤波电感10mH;电阻5Ω;直流侧初始电压为0,参考电压220V;直流侧电容470μF;负载为RSC;ipm开关频率为10KHz。
图3和图4为本发明所涉及非线性控制下的网侧参考电流和实际电流,实际电流能够较好地跟踪参考电流;图5上半图为传统双环级联PI控制下的i
本发明涉及双馈风力发电机控制领域,具体指一种DFIG网侧变换器电流跟踪非线性控制方法。本发明解决了经典控制对于结构复杂、强耦合的非线性系统的内部变化难以做出迅速响应的技术问题,通过建立DFIG网侧变换器数学模型,将滑模控制理论应用于电压外环控制器,无需电网电压定向,电流内环采用反馈线性化控制,并对电路参数做出相应设计,避免出现与传统PI相同的复杂结构,实现了直流母线电压快速恒定以及电流跟踪控制的目的。
关于本发明具体结构需要说明的是,本发明采用的各部件模块相互之间的连接关系是确定的、可实现的,除实施例中特殊说明的以外,其特定的连接关系可以带来相应的技术效果,并基于不依赖相应软件程序执行的前提下,解决本发明提出的技术问题,本发明中出现的部件、模块、具体元器件的型号、连接方式除具体说明的以外,均属于本领域技术人员在申请日前可以获取到的已公开专利、已公开的期刊论文、或公知常识等现有技术,无需赘述,使得本案提供的技术方案是清楚、完整、可实现的,并能根据该技术手段重现或获得相应的实体产品。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 一种DFIG网侧变换器电流跟踪非线性控制方法及其控制系统
- 一种DFIG网侧及转子侧PWM变流器的运行控制方法