管道清管检测跟踪系统
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及清管器跟踪技术领域,尤其涉及管道清管检测跟踪系统。
背景技术
管道长期不间断运行工作,管壁会积累很多杂质,使流速下降,严重的可以导致锈蚀甚至堵塞,因此,管道的定期检测和清洁十分必要,管道清洁工作是依靠清管器完成的,清管器是由气体、液体或管道输送介质推动,用以清理管道的专用工具,为防止清管器在管道中停滞或卡住影响管道的正常使用,会构建清管器的追踪系统,传统的清管器跟踪方法误报较多,无法实时准确判断清管器位置,且需要每隔一段距离安装一个地面接收仪器,需要人员沿线跟踪,费时费力。
发明内容
(一)发明目的
为解决背景技术中存在的技术问题,本发明提出管道清管检测跟踪系统,测距模块测量清管器的移动距离并通过信号收发模块将信息发送至远程控制终端,根据清管器移动距离大致锁定清管器的位置,然后地面检测人员手持探测器在清管器所在的大致位置沿管道进行检测,即可找到清管器的精确位置,能远程实时锁定清管器的大致位置,当清管器卡住时,可通过电测感应机构锁定清管器的精确位置,不存在误报,也不需要每隔一段距离安装一个地面接收仪器。
(二)技术方案
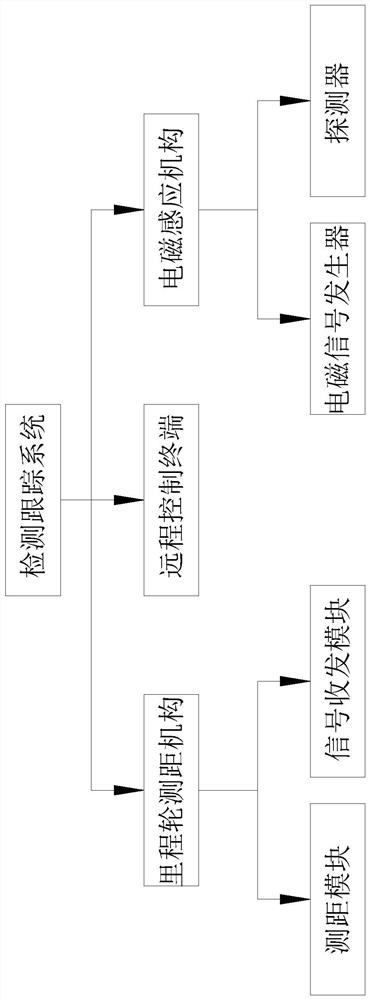
本发明提出了管道清管检测跟踪系统,包括里程轮测距机构、电磁感应机构和远程控制终端;
里程轮测距机构包括测距模块和信号收发模块;测距模块用来测量清管器前进的距离,测距模块安装在清管器上,信号收发模块与远程控制终端无线通信连接,信号收发模块用来给远程控制终端发送清管器前进距离的信息,同时信号收发模块用来接收远程终端发送的控制指令;
电磁感应机构包括电磁信号发生器和探测器;电磁信号发生器安装在清管器上,电磁信号发生器用来产生磁场,产生的磁场穿过管壁在管道周围形成磁场,探测器有固定位置和手持式两种,探测器用来探测电磁信号发生器产生的磁场,探测器与远程控制终端无线通信连接。
优选的,里程轮测距机构包括盒体、测距组件和控制器;测距组件包括第一支撑杆、第二支撑杆、弹簧、第二支撑板、转轴、滚轮和磁铁:盒体设置在清管器上;第一支撑杆设置在盒体外壁上,第一支撑杆上沿其轴线方向开设盲孔,盲孔在第一支撑杆远离盒体的端面上形成开口;第二支撑杆配合插入盲孔内,第二支撑杆远离第一支撑杆的端部设置第一支撑板;弹簧套在第一支撑杆上,弹簧一端与盒体连接,弹簧另一端与第一支撑板连接,弹簧处于压缩状态;第二支撑板设置在第一支撑板背向第二支撑杆的端面上,第二支撑板设置相互平行的两组;转轴位于两组第二支撑板之间,转轴两端分别与两组第二支撑板转动连接;滚轮设置在转轴上,滚轮与管道内周壁接触;磁铁设置在滚轮端面上,磁铁靠近滚轮边缘;第二支撑板朝向滚轮的端面上设有与磁铁配合用来检测滚轮转动圈数的磁敏传感器;控制器设置在盒体内,控制器与磁敏传感器信号传输连接,控制器内设有计数模块和信号收发模块,计数模块用来统计滚轮转动圈数,信号收发模块与远程控制终端无线通信连接,信号收发模块用来给远程控制终端发生清管器移动距离的信息。
优选的,里程轮测距机构中的测距组件设置多组,多组测距组件中的滚轮均与管道内壁接触。
优选的,提出清管器定位方法,包括以下步骤:S1、控制器中的计数模块统计每组滚轮的转动圈数;S2、计算多组滚轮的平均转动圈数;S3、控制器中的信号收发模块将滚轮的平均转动圈数发送至远程控制终端;S4、远程控制终端接收滚轮的平均转动圈数信息,再乘以滚轮的直径得出清管器的移动距离,得出清管器的大致位置;S5、地面检测人员手持探测器在清管器所在的大致位置沿管道进行检测,找到清管器的精确位置。
优选的,里程轮测距机构中的盒体上设置多组安装板,安装板上开设多组安装孔。
优选的,里程轮测距机构中的滚轮外周壁上设置防滑纹。
本发明的上述技术方案具有如下有益的技术效果:测距模块测量清管器的移动距离并通过信号收发模块将信息发送至远程控制终端,根据清管器移动距离大致锁定清管器的位置,然后地面检测人员手持探测器在清管器所在的大致位置沿管道进行检测,即可找到清管器的精确位置,能远程实时锁定清管器的大致位置,当清管器卡住时,可通过电测感应机构锁定清管器的精确位置,不存在误报,也不需要每隔一段距离安装一个地面接收仪器。
附图说明
图1为本发明提出的管道清管检测跟踪系统的结构图。
图2为本发明提出的里程轮测距机构的结构示意图。
图3为本发明提出的里程轮测距机构中滚轮的结构示意图。
附图标记:1、盒体;2、第一支撑杆;3、盲孔;4、第二支撑杆;5、弹簧;6、第一支撑板;7、第二支撑板;8、转轴;9、滚轮;10、磁铁;11、磁敏传感器;12、控制器;13、安装板;14、安装孔;15、防滑纹。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
如图1-3所示,本发明提出的管道清管检测跟踪系统,包括里程轮测距机构、电磁感应机构和远程控制终端;
里程轮测距机构包括测距模块和信号收发模块;测距模块用来测量清管器前进的距离,测距模块安装在清管器上,信号收发模块与远程控制终端无线通信连接,信号收发模块用来给远程控制终端发送清管器前进距离的信息,同时信号收发模块用来接收远程终端发送的控制指令;
电磁感应机构包括电磁信号发生器和探测器;电磁信号发生器安装在清管器上,电磁信号发生器用来产生磁场,产生的磁场穿过管壁在管道周围形成磁场,探测器有固定位置和手持式两种,探测器用来探测电磁信号发生器产生的磁场,探测器与远程控制终端无线通信连接。
本发明中,测距模块测量清管器的移动距离并通过信号收发模块将信息发送至远程控制终端,根据清管器移动距离大致锁定清管器的位置,然后地面检测人员手持探测器在清管器所在的大致位置沿管道进行检测,即可找到清管器的精确位置,能远程实时锁定清管器的大致位置,当清管器卡住时,可通过电测感应机构锁定清管器的精确位置,不存在误报,也不需要每隔一段距离安装一个地面接收仪器。
在一个可选的实施例中,里程轮测距机构包括盒体1、测距组件和控制器12;测距组件包括第一支撑杆2、第二支撑杆4、弹簧5、第二支撑板7、转轴8、滚轮9和磁铁10:盒体1设置在清管器上;第一支撑杆2设置在盒体1外壁上,第一支撑杆2上沿其轴线方向开设盲孔3,盲孔3在第一支撑杆2远离盒体1的端面上形成开口;第二支撑杆4配合插入盲孔3内,第二支撑杆4远离第一支撑杆2的端部设置第一支撑板6;弹簧5套在第一支撑杆2上,弹簧5一端与盒体1连接,弹簧5另一端与第一支撑板6连接,弹簧5处于压缩状态;第二支撑板7设置在第一支撑板6背向第二支撑杆4的端面上,第二支撑板7设置相互平行的两组;转轴8位于两组第二支撑板7之间,转轴8两端分别与两组第二支撑板7转动连接;滚轮9设置在转轴8上,滚轮9与管道内周壁接触;磁铁10设置在滚轮9端面上,磁铁10靠近滚轮9边缘;第二支撑板7朝向滚轮9的端面上设有与磁铁10配合用来检测滚轮9转动圈数的磁敏传感器11;控制器12设置在盒体1内,控制器12与磁敏传感器11信号传输连接,控制器12内设有计数模块和信号收发模块,计数模块用来统计滚轮9转动圈数,信号收发模块与远程控制终端无线通信连接,信号收发模块用来给远程控制终端发生清管器移动距离的信息;滚轮9每转动一圈,磁敏传感器11产生一次信号,计数模块通过统计信号产生次数即可统计滚轮9的转动圈数,远程控制终端管理人员再根据滚轮9直径即可得出清管器的移动距离,从而大致锁定清管器的位置。
在一个可选的实施例中,里程轮测距机构中的测距组件设置多组,多组测距组件中的滚轮9均与管道内壁接触;滚轮9在清管器行进过程中会出现打滑,通过管道焊缝时也会产生旋转,由此造成转数数据偏差,通过设置多组测距组件,来提高数据的可靠性。
在一个可选的实施例中,提出清管器定位方法,包括以下步骤:
S1、控制器12中的计数模块统计每组滚轮9的转动圈数;
S2、计算多组滚轮9的平均转动圈数;
S3、控制器12中的信号收发模块将滚轮9的平均转动圈数发送至远程控制终端;
S4、远程控制终端接收滚轮9的平均转动圈数信息,再乘以滚轮9的直径得出清管器的移动距离,得出清管器的大致位置;
S5、地面检测人员手持探测器在清管器所在的大致位置沿管道进行检测,找到清管器的精确位置;先通过清管器的前进距离大致推断清管器的位置,然后根据探测器精准确定清管器的位置,不存在误报错报现象。
在一个可选的实施例中,里程轮测距机构中的盒体1上设置多组安装板13,安装板13上开设多组安装孔14;便于将盒体1安装在清管器上。
在一个可选的实施例中,里程轮测距机构中的滚轮9外周壁上设置防滑纹15;防止滚轮9打滑,提高检测出滚轮9转动圈数的数据可靠性。
应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
- 管道清管检测跟踪系统
- 一种管道清管器在线跟踪定位系统