车辆防追尾提醒方法和系统
文献发布时间:2023-06-19 11:40:48
技术领域
本发明实施例涉及车辆技术,尤其涉及一种车辆防追尾提醒方法和系统。
背景技术
目前汽车行业防追尾技术主要集中在前向防追尾,防止车辆自身追尾前向行驶的其他车辆或障碍物,从而保护自身车辆安全。前向防追尾技术通常是通过传感器探测车辆行驶前方是否有障碍物,结合自车速度,判断是否需要对驾驶员进行提醒或自动进行制动操作,从而减少追尾事故伤害。前向防追尾技术以自动紧急制动(Autonomous EmergencyBraking,AEB)为代表。
但是目前对于车辆后向防追尾并没有成熟的技术方案。特别是在商用车领域,由于商用车长度较长,对于驾驶员而言,商用车后方具有视觉盲区,驾驶员缺乏观察车辆正后方的手段。另一方面,商用车后向行驶的车辆可能由于疲劳驾驶或注意力不集中的情况造成追尾事故,而大型的商用车在被小型车辆追尾后,商用车的驾驶员有时甚至难以察觉,从而可能造成更大的附带损害。
长期以来,商用车后向的防追尾解决方案仅是在车辆尾部安装防碰撞警示牌、防撞梁、反光条等,这都属于被动式安全装置,不具备主动提醒能力,无法实现良好的防追尾效果。
发明内容
本发明提供一种车辆防追尾提醒方法和系统,提供了一种可靠的车辆后向防追尾提醒方案,提高了车辆的安全性。
第一方面,本发明实施例提供一种车辆防追尾提醒方法,包括:
获取安装于本车正后方的双目摄像头采集的连续图像,双目摄像头包括两个具有间距的摄像头;
基于视差原理对双目摄像头采集的连续图像进行处理,确定本车后向车辆碰撞本车的后向碰撞预警时间;
若后向碰撞预警时间小于预设安全碰撞时间阈值,则向本车的驾驶员交互终端发送碰撞告警信息。
在第一方面一种可能的实现方式中,基于视差原理对双目摄像头采集的连续图像进行处理,确定本车后向车辆碰撞本车的后向碰撞预警时间,包括:
对于连续图像中的每张图像,基于视差原理确定本车后向车辆与本车的距离;
根据连续图像的采集时间间隔和连续图像中本车后向车辆与本车的距离,计算本车后向车辆的速度;
根据本车后向车辆的速度和距离本车的距离,计算本车后向车辆碰撞本车的后向碰撞预警时间。
在第一方面一种可能的实现方式中,对于连续图像中的每张图像,基于视差原理确定本车后向车辆与本车的距离,包括:
对于连续图像中的每张图像,分别计算双目摄像头中两个摄像头采集的图像中本车后向车辆与摄像头的距离;
根据双目摄像头的两个摄像头之间的间距和根据两个摄像头采集的图像计算的本车后向车辆与摄像头的距离,通过三角函数计算本车后向车辆与本车的距离。
在第一方面一种可能的实现方式中,确定本车后向车辆碰撞本车的后向碰撞预警时间之后,还包括:
若后向碰撞预警时间小于预设安全碰撞时间阈值,则在安装于本车正后方的告警显示装置上显示碰撞告警提示信息。
在第一方面一种可能的实现方式中,向本车的驾驶员交互终端发送碰撞告警信息,包括:
向本车的驾驶员交互终端发送音频碰撞告警信息、灯光碰撞告警信息、文字碰撞告警信息中的至少一种碰撞告警信息。
第二方面,本发明实施例提供一种车辆防追尾提醒系统,包括:
双目摄像头、数据处理模块和驾驶员交互终端;
双目摄像头安装于待提醒车辆正后方,双目摄像头包括两个具有间距的摄像头,双目摄像头用于采集待提醒车辆正后方的连续图像;
数据处理模块,用于基于视差原理对双目摄像头采集的连续图像进行处理,确定待提醒车辆后向车辆碰撞待提醒车辆的后向碰撞预警时间,若后向碰撞预警时间小于预设安全碰撞时间阈值,则向待提醒车辆的驾驶员交互终端发送碰撞告警信息;
驾驶员交互终端,用于向待提醒车辆的驾驶员发出碰撞告警信息。
在第二方面一种可能的实现方式中,数据处理模块,具体用于对于连续图像中的每张图像,基于视差原理确定待提醒车辆后向车辆与待提醒车辆的距离;根据连续图像的采集时间间隔和连续图像中待提醒车辆后向车辆与待提醒车辆的距离,计算待提醒车辆后向车辆的速度;根据待提醒车辆后向车辆的速度和距离待提醒车辆的距离,计算待提醒车辆后向车辆碰撞待提醒车辆的后向碰撞预警时间。
在第二方面一种可能的实现方式中,数据处理模块,具体用于对于连续图像中的每张图像,分别计算双目摄像头中两个摄像头采集的图像中待提醒车辆后向车辆与摄像头的距离;根据双目摄像头的两个摄像头之间的间距和根据两个摄像头采集的图像计算的待提醒车辆后向车辆与摄像头的距离,通过三角函数计算待提醒车辆后向车辆与待提醒车辆的距离。
在第二方面一种可能的实现方式中,车辆防追尾提醒系统还包括:告警显示装置;
数据处理模块,还用于若判断后向碰撞预警时间小于预设安全碰撞时间阈值,则向告警显示装置发送碰撞告警提示信息;
告警显示装置,用于显示碰撞告警提示信息。
在第二方面一种可能的实现方式中,驾驶员交互终端,具体用于向待提醒车辆的驾驶员发送音频碰撞告警信息、灯光碰撞告警信息、文字碰撞告警信息中的至少一种碰撞告警信息。
本发明实施例提供的车辆防追尾提醒方法和系统,首先获取安装于本车正后方的双目摄像头采集的连续图像,双目摄像头包括两个具有间距的摄像头,然后基于视差原理对双目摄像头采集的连续图像进行处理,确定本车后向车辆碰撞本车的后向碰撞预警时间,若后向碰撞预警时间小于预设安全碰撞时间阈值,则向本车的驾驶员交互终端发送碰撞告警信息,由于采用车辆后方的双目摄像头对车辆后向的其他车辆进行后向碰撞检测,使得车辆实现了主动的后向防追尾识别,从而提高了车辆的主动安全性。
附图说明
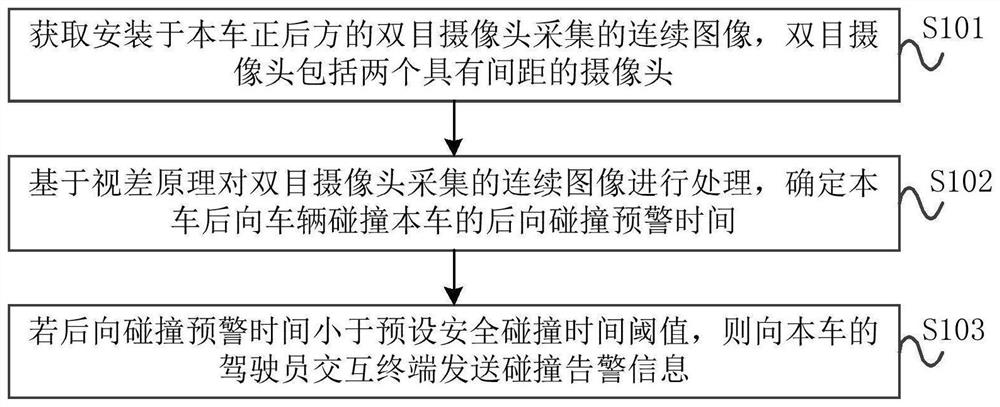
图1为本发明实施例提供的一种车辆防追尾提醒方法的流程图;
图2为双目摄像头采集的原始双目图像;
图3为双目视差计算示意图;
图4为本发明实施例提供的另一种车辆防追尾提醒方法的流程图;
图5为应用本发明实施例提供的车辆防追尾提醒方法的车辆示意图;
图6和图7为图5所示车辆的局部示意图;
图8为本发明实施例提供的车辆防追尾提醒系统的结构示意图;
图9为本发明实施例提供的另一种车辆防追尾提醒系统的结构示意图。
具体实施方式
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
图1为本发明实施例提供的一种车辆防追尾提醒方法的流程图,如图1所示,本实施例提供的车辆防追尾提醒方法包括:
步骤S101,获取安装于本车正后方的双目摄像头采集的连续图像,双目摄像头包括两个具有间距的摄像头。
本实施例提供的车辆防追尾提醒方法,用于实现车辆的后向防追尾提醒,也就是对本车后方其他车辆追尾本车的风险进行提醒,从而提高车辆行驶的安全性。本实施例提供的车辆防追尾提醒方法可以应用于任一种车辆。由于大型客车、载重货车、集装箱挂车等商用车辆,这些商用车辆的车长很长,因此车辆后方的视野盲区也较大,因此优选地,本实施例提供的车辆防追尾提醒方法可以应用于车长较长的商用车辆中。
由于目前的车辆防追尾方案主要关注车辆前向防追尾,而对于车辆后向防追尾,主要还是依靠安装于车辆后方的防碰撞警示牌、防撞梁、反光条等被动式安全装置,没有主动防追尾方案。在本实施例中,通过在车辆正后方安装双目摄像头,通过双目摄像头的视差原理,对车辆后方的其他车辆进行检测,从而实现车辆后向防追尾。
首先,需要在车辆正后方安装双目摄像头,双目摄像头是包括两个摄像头的一种摄像头,双目摄像头的两个摄像头之间具有一定的间距。双目摄像头中的两个摄像头分别能够实现图像采集。为了实现车辆后向防追尾,需要对车辆后方进行持续检测,那么就需要获取安装于本车正后方的双目摄像头采集的连续图像。双目摄像头采集的连续图像可以是以一定的采集周期进行采集,该采集周期例如可以是0.1秒或者其他采集周期。
步骤S102,基于视差原理对双目摄像头采集的连续图像进行处理,确定本车后向车辆碰撞本车的后向碰撞预警时间。
由于双目摄像头的两个摄像头之间具有一定的间距,且该间距是固定值,而每个摄像头采集的图像都是从各摄像头本身的视角进行采集的。那么两个摄像头采集的图像是具有一定区别的,对于本车后方的一个物体,根据两个摄像头采集的图像对该物体进行测距,将分别得到两个摄像头到该物体的距离数据。将两个摄像头和该物体作为三角形的三个顶点连接为一个三角形,两个摄像头到该物体的距离数据和两个摄像头的间距分别为三角形的三个边长。那么通过简单的三角函数计算,就可以计算出本车与车辆后方物体的距离。而双目摄像头采集的为连续图像,且该连续图像具有一个固定的周期,那么通过对连续图像中的每个图像均进行测距处理,即可得到本车与后方物体的连续距离变化,从而可以确定出后方物体相对于本车的速度。
一般地,在车辆处于行驶状态时,才有后向防追尾提醒的需求,而可能对行驶中的车辆追尾的也是其他车辆。因此,对于具有后向防追尾提醒的车辆,称为本车,需要对本车后向的其他车辆是否有追尾本车的风险进行预警判断。那么对双目摄像头采集的连续图像进行处理,可以是确定本车后向车辆与本车的距离、速度信息。那么在确定了本车后向车辆与本车的距离、速度信息后,即可确定本车后向车辆是否有追尾本车的可能,并且也可以计算出本车后向车辆追尾本车所需时间,将其称为本车的后向碰撞预警时间。本车的后向碰撞预警时间也就是将本车后向车辆与本车的距离处于后向车辆的速度,即可得到本车的后向碰撞预警时间。
在一实施例中,基于视差原理对双目摄像头采集的连续图像进行处理,确定本车后向车辆碰撞本车的后向碰撞预警时间,可以采用如下方式:对于连续图像中的每张图像,基于视差原理确定本车后向车辆与本车的距离;根据连续图像的采集时间间隔和连续图像中本车后向车辆与本车的距离,计算本车后向车辆的速度;根据本车后向车辆的速度和距离本车的距离,计算本车后向车辆碰撞本车的后向碰撞预警时间。
也即对双目摄像头采集的连续图像中的每张图像均进行图像识别,首先识别出各图像中是否存在车辆。对单行图像进行图像识别,确定其中是否存在车辆可以采用任一种图像识别方法进行处理,此处不再赘述。然后对于识别出包含车辆的图像,基于视差原理确定本车后向车辆与本车的距离。接着对连续的图像,根据连续图像的采集时间间隔和连续图像中本车后向车辆与本车的距离,计算本车后向车辆的速度,最后即可根据本车后向车辆的速度和距离本车的距离,计算本车后向车辆碰撞本车的后向碰撞预警时间。
对于连续图像中的每张图像,基于视差原理确定本车后向车辆与本车的距离,可以采用如下方法:对于连续图像中的每张图像,分别计算双目摄像头中两个摄像头采集的图像中本车后向车辆与摄像头的距离;根据双目摄像头的两个摄像头之间的间距和根据两个摄像头采集的图像计算的本车后向车辆与摄像头的距离,通过三角函数计算本车后向车辆与本车的距离。
下面以一具体实例对发明实施例提供的车辆防追尾提醒方法中,基于视差原理对双目摄像头采集的连续图像进行处理的方法进行详细说明。首先,需要对双目摄像头采集的连续图像中的每一图像进行处理,双目摄像头采集的每一图像实际包含两个摄像头分别采集的图像,例如图2所示,图2为双目摄像头采集的原始双目图像,包括左右两幅,分别为双目摄像头的两个摄像头采集的图像,从图2中可以看出,双目摄像头的两个摄像头采集的图像基本相同,仅由于两个摄像头的位置具有一定间距而使得图像中的元素具有一定的位置偏差。然后对双目摄像头的两个摄像头采集的图像进行图像识别,确定是否存在车辆。
若存在车辆则分别计算两个摄像头采集的图像中本车后向车辆与摄像头的距离,并根据两个摄像头之间的间距和根据两个摄像头采集的图像计算的本车后向车辆与摄像头的距离,通过三角函数计算本车后向车辆与本车的距离。具体的计算方法如图3所示,图3为双目视差计算示意图,在图3中,设O
步骤S103,若后向碰撞预警时间小于预设安全碰撞时间阈值,则向本车的驾驶员交互终端发送碰撞告警信息。
在确定了本车后向车辆碰撞本车的后向碰撞预警时间后,也就是确定了本车后向车辆若仍以当前速度和方向行驶,可能在多长时间后与本车发生碰撞。若该时间较长,则本车后向车辆的驾驶员可能处于正常驾驶状态。而若该时间较短,则本车后向车辆的驾驶员可能处于非正常驾驶状态,若不及时采取措施则可能导致发生追尾事故。因此可以设置一个安全碰撞时间阈值,该安全碰撞时间阈值可以根据需要设置。且安全碰撞时间阈值可以是一个动态的值,根据本车后向车辆的速度而确定对应的安全碰撞之间阈值,本车后向车辆的速度越快则该安全碰撞之间阈值越短,本车后向车辆的速度越慢则该安全碰撞之间阈值越长。
若后向碰撞预警时间小于预设安全碰撞时间阈值,则意味着本车后向车辆有发生追尾的可能,此时可以向本车驾驶员交互终端发送碰撞告警信息。本车驾驶员交互终端可以是设置于本车驾驶室中的终端设备,该终端设备可以向驾驶员发送交互信息。本车驾驶员交互终端在获取碰撞告警信息后,将通过声音、文字、灯光等告警方式中的至少一种,向本车驾驶员发出碰撞告警信息。例如,本车驾驶员交互终端可以播放音频的后向追尾告警信息(例如播放“后方有车可能追尾”),或者在驾驶室中闪烁告警灯光,或者在本车驾驶员交互终端的屏幕上显示告警信息(例如通过图像、文字的方式显示本车后向车辆的相关信息和告警信息)。那么当本车驾驶员通过本车驾驶员交互终端获知碰撞告警信息后,即可获知本车后向有其他车辆可能发生追尾,那么本车驾驶员即可采取变道、加速等方式避免产生追尾,且也可以通过打开应急灯、鸣笛等方式第后向车辆进行提醒。
本实施例提供的车辆防追尾提醒方法,首先获取安装于本车正后方的双目摄像头采集的连续图像,双目摄像头包括两个具有间距的摄像头,然后基于视差原理对双目摄像头采集的连续图像进行处理,确定本车后向车辆碰撞本车的后向碰撞预警时间,若后向碰撞预警时间小于预设安全碰撞时间阈值,则向本车的驾驶员交互终端发送碰撞告警信息,由于采用车辆后方的双目摄像头对车辆后向的其他车辆进行后向碰撞检测,使得车辆实现了主动的后向防追尾识别,从而提高了车辆的主动安全性。
图4为本发明实施例提供的另一种车辆防追尾提醒方法的流程图,如图4所示,本实施例提供的车辆防追尾提醒方法包括:
步骤S401,获取安装于本车正后方的双目摄像头采集的连续图像,双目摄像头包括两个具有间距的摄像头。
步骤S402,基于视差原理对双目摄像头采集的连续图像进行处理,确定本车后向车辆碰撞本车的后向碰撞预警时间。
步骤S403,若后向碰撞预警时间小于预设安全碰撞时间阈值,则向本车的驾驶员交互终端发送碰撞告警信息。
步骤S404,若后向碰撞预警时间小于预设安全碰撞时间阈值,则在安装于本车正后方的告警显示装置上显示碰撞告警提示信息。
在图1所示实施例中,若通过双目摄像头采集连续图像后,确定本车后向车辆与本车的后向碰撞预警时间小于预设安全碰撞时间,则向本车的驾驶员交互终端发送碰撞告警信息,也就是向本车的驾驶员提出碰撞告警信息。但发生追尾事故时,碰撞事故的发生主体是位于后向的车辆,因此对可能对本车造成追尾的后向车辆的提醒更为重要。因此可以在本车后方安装告警显示装置,后向显示装置可以是具有灯光、文字、图像等显示功能的显示装置。在后向碰撞预警时间小于预设安全碰撞时间阈值时,则可以在安装于本车正后方的告警显示装置上显示碰撞告警提示信息(例如可以在告警显示装置上显示“即将追尾!”的字样)。这样既可对本车后向的车辆发出警示信息,使得本车后向的车辆驾驶员能够获知存在追尾的安全隐患,从而可以采取减速、变道等方式避免发生追尾事故。
图5为应用本发明实施例提供的车辆防追尾提醒方法的车辆示意图,图5示出的是一辆集装箱拖挂车,由于车辆长度较长,在车辆后方具有较大的视野盲区。如图5所示,在车辆正后方安装有双目摄像头51,在车辆驾驶室内安装有驾驶员交互终端52,双目摄像头51和驾驶员交互终端52可以通过有线或无线的方式进行连接,实现数据交互。另外,还可以在车辆上设置能够对双目摄像头51采集的图像进行处理的数据处理装置或模块。数据处理装置或模块可以是独立的装置,也可以是集成设置于双目摄像头51或驾驶员交互终端52中的模块。优选地,双目摄像头51可以与数据处理模块设置于一起,共同组成双目感知模块。设置有双目摄像头51和驾驶员交互终端52的车辆可以实现图1所示车辆防追尾提醒方法。双目摄像头51可以设置于车辆正后方的正中间,这样可以对车辆后方其他车辆与本车的距离进行准确检测。
可选地,在图5所示车辆中,还可以在车辆正后方设置告警显示装置53,告警显示装置53和双目摄像头51可以通过有线或无线的方式进行连接,实现数据交互。设置有双目摄像头51、驾驶员交互终端52和告警显示装置53的车辆可以实现图4所示车辆防追尾提醒方法。
图6和图7为图5所示车辆的局部示意图,其中图6为车辆尾部示意图,图7为车辆驾驶室示意图。
图8为本发明实施例提供的车辆防追尾提醒系统的结构示意图,如图8所示,本实施例提供的车辆防追尾提醒系统包括:双目摄像头81、数据处理模块82和驾驶员交互终端83。
双目摄像头81安装于待提醒车辆正后方,双目摄像头81包括两个具有间距的摄像头,双目摄像头81用于采集待提醒车辆正后方的连续图像;数据处理模块82,用于基于视差原理对双目摄像头81采集的连续图像进行处理,确定待提醒车辆后向车辆碰撞待提醒车辆的后向碰撞预警时间,若后向碰撞预警时间小于预设安全碰撞时间阈值,则向待提醒车辆的驾驶员交互终端83发送碰撞告警信息;驾驶员交互终端83,用于向待提醒车辆的驾驶员发出碰撞告警信息。
本实施例提供的车辆防追尾提醒系统中的双目摄像头81和驾驶员交互终端83的安装位置可以如图5所示,数据处理模块82可以与双目摄像头81共同组成双目感知模块,或者双目摄像头81也可以设置于驾驶员交互终端83中。
本实施例提供的车辆防追尾提醒系统用于实现图1所示车辆防追尾提醒方法的技术方案,其实现原理和技术效果类似,此处不再赘述。
进一步地,在图8所示实施例中,数据处理模块82,具体用于对于连续图像中的每张图像,基于视差原理确定待提醒车辆后向车辆与待提醒车辆的距离;根据连续图像的采集时间间隔和连续图像中待提醒车辆后向车辆与待提醒车辆的距离,计算待提醒车辆后向车辆的速度;根据待提醒车辆后向车辆的速度和距离待提醒车辆的距离,计算待提醒车辆后向车辆碰撞待提醒车辆的后向碰撞预警时间。
进一步地,在图8所示实施例中,数据处理模块82,具体用于对于连续图像中的每张图像,分别计算双目摄像头中两个摄像头采集的图像中待提醒车辆后向车辆与摄像头的距离;根据双目摄像头的两个摄像头之间的间距和根据两个摄像头采集的图像计算的待提醒车辆后向车辆与摄像头的距离,通过三角函数计算待提醒车辆后向车辆与待提醒车辆的距离。
可选地,图8所示车辆防追尾提醒系统还包括:告警显示装置84,数据处理模块82,还用于若判断后向碰撞预警时间小于预设安全碰撞时间阈值,则向告警显示装置84发送碰撞告警提示信息;告警显示装置84,用于显示碰撞告警提示信息。
进一步地,在图8所示实施例中,驾驶员交互终端83,具体用于向待提醒车辆的驾驶员发送音频碰撞告警信息、灯光碰撞告警信息、文字碰撞告警信息中的至少一种碰撞告警信息。
下面以一具体实例对本发明实施例提供的车辆防追尾提醒系统的结构进行说明。如图9所示,图9为本发明实施例提供的另一种车辆防追尾提醒系统的结构示意图,实施例提供的车辆防追尾提醒系统包括双目感知模块91、驾驶员交互终端92和告警显示装置93。
其中双目感知模块91由双目摄像头94和数据处理模块95组成。双目摄像头94中包括两个摄像头,数据处理模块95由计算芯片和多个数据传输接口所组成,包括与双目摄像头94中的两个摄像头连接的移动产业处理器接口(Mobile Industry ProcessorInterface,MIPI)图像接口、与驾驶员交互终端92中的逻辑控制器连接的低电压差分信号(Low-Voltage Differential Signalin,LVDS)图像接口和控制器局域网络(ControllerArea Network,CAN)通信接口,其中CAN通信接口还与告警显示装置93中的逻辑控制装置连接。数据处理模块95中的计算芯片用于对双目摄像头94获取的图像进行识别处理,并进行后向碰撞预警时间的判断,将判断后的结果输出给驾驶员交互终端92和告警显示装置93。驾驶员交互终端92中包括逻辑控制器、显示屏、扬声器、按键,驾驶员交互终端92可以通过显示屏以图像的方式显示碰撞告警信息或者通过扬声器以声音的方式发出碰撞告警信息。告警显示装置93包括逻辑控制器、恒流模组和LED灯组,可以通过LED灯组显示碰撞告警提示信息。
本发明实施例还提供一种具有车辆防追尾提醒系统的车辆,包括:车辆主体和设置于所述车辆主体上的车辆防追尾提醒系统,所述车辆防追尾提醒系统包括双目摄像头、数据处理模块和驾驶员交互终端。其中车辆主体可以任一种车辆,车辆防追尾提醒系统可以为图8所示车辆防追尾提醒系统。
本发明还提供一种包含计算机可执行指令的存储介质,计算机可执行指令在由计算机处理器执行时用于执行一种车辆防追尾提醒方法,该方法包括:获取安装于本车正后方的双目摄像头采集的连续图像,双目摄像头包括两个具有间距的摄像头;基于视差原理对双目摄像头采集的连续图像进行处理,确定本车后向车辆碰撞本车的后向碰撞预警时间;若后向碰撞预警时间小于预设安全碰撞时间阈值,则向本车的驾驶员交互终端发送碰撞告警信息。
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
- 车辆防追尾提醒系统和具有车辆防追尾系统的车辆
- 车辆防被追尾系统及具有该系统的防被追尾车辆