一种神经康复训练器
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及康复训练器技术领域,具体的说是一种神经康复训练器。
背景技术
骨折是指骨结构的连续性完全或部分断裂。多见于儿童及老年人,中青年人也时有发生。病人常为—个部位骨折,少数为多发性骨折。经及时恰当处理,多数病人能恢复原来的功能,少数病人可遗留有不同程度的后遗症,病人在骨折后通过受伤肢体肌肉收缩,增加骨折周围组织的血液循环,促进骨折愈合,防止肌肉萎缩,通过主动或被动活动未被固定的关节,防止关节粘连、关节囊挛缩等一系列康复训练运动可逐步恢复手部神经的正常信号传递,使受伤肢体的功能尽快恢复到骨折前的正常状态,然而,在进行手部神经康复训练的过程中,往往会存在以下问题:
1)在进行手部神经康复训练的过程中,由于此时手部的机能部分或完全丧失,难以通过病人的主观意识使手臂相对固定在康复训练的设备内,须通过外部的固定设备对待康复训练的手臂进行固定,且难以在对手臂进行固定的同时通过按压敲击作用对固定位置的手臂进行同步的神经恢复训练运动。
2)传统的手部神经康复训练过程中,难以主动带动待康复训练的手臂在一定的角度内进行往复转动,提升手臂运动神经的恢复改善效果,也难以在手臂进行转动的同时对手臂进行二次按压敲击,更难以对待康复训练的手背及手心进行同步的双向按压作业,进一步提升神经康复训练时手臂上神经元按压敲击作用的作用面积以及作用效果。
发明内容
为了弥补现有技术的不足,本发明提供了一种神经康复训练器。
本发明所要解决其技术问题所采用以下技术方案来实现:一种神经康复训练器,包括安装底板、支撑脚、定位机构和振动机构,所述的安装底板下端四周拐角处均匀安装有支撑脚,安装底板的上端安装有定位机构,位于定位机构一侧的安装底板上安装有振动机构。
所述的定位机构包括定位底板、定位座、定位环、扭簧、定位电机、定位转轴、定位凸轮、定位滑架、定位弹簧、定位转架和定位凸块,安装底板的上端对称安装有定位底板,定位底板的上端安装有定位座,定位座上通过转动配合的方式均匀安装有多组定位环,且定位环通过扭簧与定位座相连接,位于相邻两组之间的定位座内通过转动配合的方式均匀安装有多组定位转架,定位转架的侧壁上均匀设置有定位凸块,位于定位座下方的定位底板之间通过轴承安装有定位转轴,定位底板上通过电机座安装有定位电机,且定位电机的输出轴通过联轴器与定位转轴相连接,位于定位底板之间的定位转轴上通过花键对称安装有定位凸轮,定位转架的下端通过铰接的方式对称安装有定位滑架,定位滑架的中部通过定位弹簧与定位座相连接且定位滑架的下端通过滑动配合的方式抵靠在定位凸轮上,设置的定位滑架可在定位凸轮的推动下使定位转架在一定的角度内进行往复转动,进一步通过定位凸块对待康复训练的手臂进行按压敲击,通过定位环从手臂上方的反向抱夹作用可进一步提升定位凸块对于手臂的按压敲击力度,提升神经康复训练的训练效果。
所述的振动机构包括振动转盘、限位架、限位滑槽、连接轴、复位弹簧、振动转环、支撑杆、支撑座、啮合齿、振动齿轮、升降滑杆、升降弹簧、升降环、升降块和振动单元,定位底板上安装有振动转盘,振动转盘的侧壁上沿其周向均匀设置有限位架,位于限位架内侧的振动转盘上通过滑动配合的方式安装有振动转环,且振动转环与振动转盘之间通过复位弹簧相连接,振动转盘上沿其周向均匀设置有连接轴,振动转环上沿其周向均匀开设有限位滑槽,连接轴位于限位滑槽内且连接轴与振动转环滑动配合,振动转环的下端侧壁沿其周向均匀设置有啮合齿,定位转轴上通过花键安装有振动齿轮,振动齿轮位于振动转环下方且振动齿轮与啮合齿啮合传动,位于啮合齿上方的振动转环上均匀安装有支撑杆,支撑杆的端部安装有支撑座,支撑座通过滑动配合的方式抵靠在安装底板上,位于支撑杆外侧的安装底板上通过滑动配合的方式均匀安装有多组升降滑杆,升降滑杆的下端分别通过升降弹簧与安装底板相连接,每组升降滑杆之间通过铰接配合的方式均匀安装有多组升降环,升降环位于支撑杆的上方且升降环的侧壁上均匀设置有升降块,支撑座上安装有振动单元,通过振动齿轮与啮合齿之间的间歇啮合传动可带动振动转环在一定角度内进行的往复转动,通过限位滑槽与连接轴之间的限位滑动配合可实现对振动转环的转动角度进行二次限制,进一步实现对待康复训练手臂转动角度的控制,避免单次转动角度过大造成病人的不适应。
作为本发明的一种优选技术方案,所述的振动单元包括压实环、压实气囊、压实凸块、握持球、橡胶层、握持气囊、振动滑杆和振动弹簧,支撑座上通过铰接配合的方式对称安装有压实环,压实环之间设置有压实气囊,压实气囊的侧壁上均匀设置有压实凸块,位于压实气囊下方的支撑座上安装有握持球,握持球的外壁套设有橡胶层,位于橡胶层内侧的握持球侧壁上通过滑动配合的方式均匀安装有振动滑杆,握持球的内部安装有握持气囊,振动滑杆的一端抵靠在橡胶层上,振动滑杆的另一端抵靠在握持气囊上,振动滑杆的中部通过振动弹簧与握持球相连接,设置于压实气囊上的压实凸块可进一步通过挤压作用对手背上的神经元进行按压,通过压实气囊膨胀时带来的压力可进一步使病人的手贴合在握持球上,避免因病人手部的神经元受损造成对握持球的不稳定握持。
作为本发明的一种优选技术方案,所述的振动齿轮为不完全齿轮,通过振动齿轮与啮合齿之间的间歇啮合传动实现控制振动转环的间歇往复转动。
作为本发明的一种优选技术方案,所述的定位环为四分之一圆环,定位环通过铰接对称安装在定位座的两侧,且定位环位于定位座的上方。
作为本发明的一种优选技术方案,所述的定位滑架为Y形滑架,定位滑架的两侧上端通过铰接分别与位于定位座两侧的定位转架相连接,且定位滑架的Y形中部通过定位弹簧与定位座相连接,定位滑架的Y形下端通过滑动配合的方式抵靠在定位凸轮上。
作为本发明的一种优选技术方案,所述的橡胶层为柔性橡胶层,橡胶层覆盖在握持球的外表面且橡胶层的外壁上均匀设置有振动凸块。
与现有技术相比,本发明具有以下优点:
1.本发明设计的定位机构中设置的定位座可对手臂的下部分进行支撑限位,设置的扭簧可通过自身扭力使定位环从定位座的上方对待康复训练的手臂进行夹持,通过双向的抱持可使手臂在进行神经康复训练时的位置相对固定,设置的定位滑架可在定位凸轮的推动下使定位转架在一定的角度内进行往复转动,进一步通过定位凸块对待康复训练的手臂进行按压敲击,通过定位环从手臂上方的反向抱夹作用可进一步提升定位凸块对于手臂的按压敲击力度,提升神经康复训练的训练效果。
2.本发明设计的振动机构中通过振动齿轮与啮合齿之间的间歇啮合传动可带动振动转环在一定角度内进行的往复转动,通过限位滑槽与连接轴之间的限位滑动配合可实现对振动转环的转动角度进行二次限制,进一步实现对待康复训练手臂转动角度的控制,避免单次转动角度过大造成病人的不适应,设置于升降环内壁上的升降块卡在手臂进行转动的同时实现对手臂的二次按压效果,进一步提升神经康复训练时对手臂上神经元按压敲击作用的作用面积以及作用效果。
3.本发明设计的振动单元中通过设置于压实气囊上的压实凸块可进一步通过挤压作用对手背上的神经元进行按压,通过压实气囊膨胀时带来的压力可进一步使病人的手贴合在握持球上,避免因病人手部的神经元受损造成对握持球的不稳定握持,设置于握持球外壁上的柔性橡胶层可为振动滑杆的伸缩运动提供一定的缓冲效果,并通过设置的振动凸块增强对于手心的按压效果,进一步提升神经康复训练的训练效果。
附图说明
下面结合附图和实施例对本发明进一步说明。
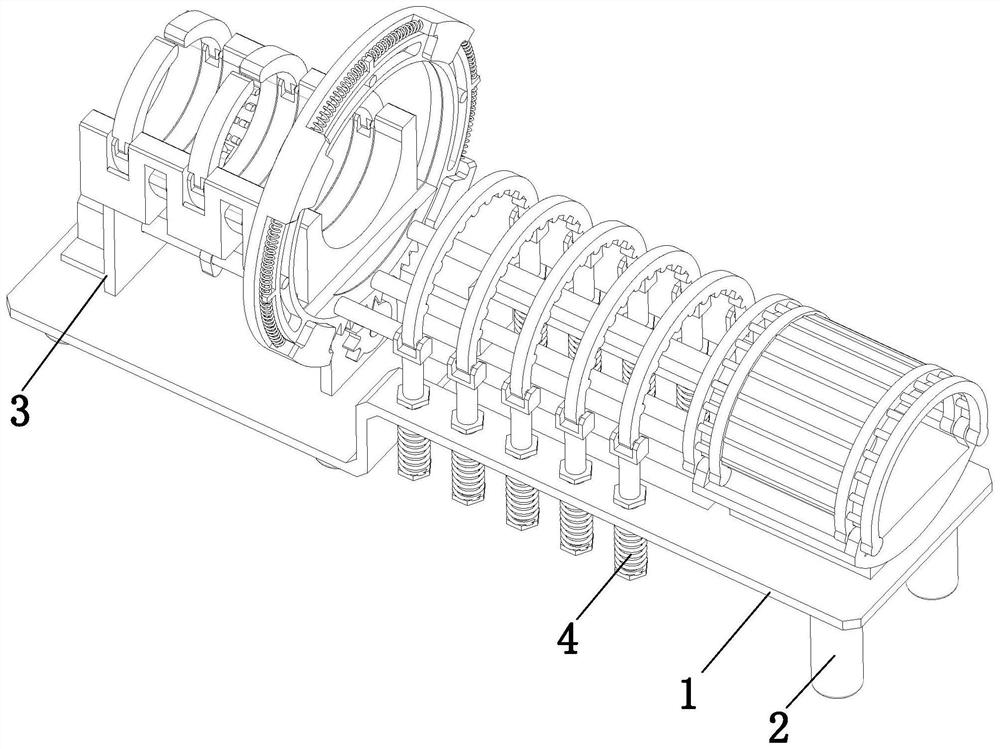
图1是本发明的整体结构示意图;
图2是本发明的剖视示意图;
图3是本发明图2的A处局部放大示意图;
图4是本发明图2的B处局部放大示意图;
图5是本发明定位机构的局部立体结构示意图;
图6是本发明振动机构的局部立体结构示意图。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合图1至图6,对本发明进行进一步阐述。
一种神经康复训练器,包括安装底板1、支撑脚2、定位机构3和振动机构4,所述的安装底板1下端四周拐角处均匀安装有支撑脚2,安装底板1的上端安装有定位机构3,位于定位机构3一侧的安装底板1上安装有振动机构4。
所述的定位机构3包括定位底板3a、定位座3b、定位环3c、扭簧3d、定位电机3e、定位转轴3f、定位凸轮3g、定位滑架3h、定位弹簧3j、定位转架3k和定位凸块3m,安装底板1的上端对称安装有定位底板3a,定位底板3a的上端安装有定位座3b,定位座3b上通过转动配合的方式均匀安装有多组定位环3c,且定位环3c通过扭簧3d与定位座3b相连接,所述的定位环3c为四分之一圆环,定位环3c通过铰接对称安装在定位座3b的两侧,且定位环3c位于定位座3b的上方,位于相邻两组之间的定位座3b内通过转动配合的方式均匀安装有多组定位转架3k,定位转架3k的侧壁上均匀设置有定位凸块3m,位于定位座3b下方的定位底板3a之间通过轴承安装有定位转轴3f,定位底板3a上通过电机座安装有定位电机3e,且定位电机3e的输出轴通过联轴器与定位转轴3f相连接,位于定位底板3a之间的定位转轴3f上通过花键对称安装有定位凸轮3g,定位转架3k的下端通过铰接的方式对称安装有定位滑架3h,所述的定位滑架3h为Y形滑架,定位滑架3h的两侧上端通过铰接分别与位于定位座3b两侧的定位转架3k相连接,且定位滑架3h的Y形中部通过定位弹簧3j与定位座3b相连接,定位滑架3h的Y形下端通过滑动配合的方式抵靠在定位凸轮3g上。
具体工作时,将待需要康复训练的整个手臂沿着定位座3b的侧壁进行放入,并依次穿过振动转环4f与升降环4p的内侧,最终进入到压实环4r1的内侧并用手握持握持球4r4,设置的扭簧3d可通过自身扭力使定位环3c从定位座3b的上方对待康复训练的手臂进行夹持,之后启动定位电机3e进行转动,进一步带动定位转轴3f进行转动,进一步带动定位凸轮3g进行同步转动,定位凸轮3g在转动的同时通过滑动抵靠作用进一步推动定位滑架3h进行直线往复升降运动,设置的定位弹簧3j可通过自身弹力推动定位滑架3h始终抵靠在定位凸轮3g的侧壁上,通过定位滑架3h的往复升降运动可进一步带动定位转架3k在定位座3b以一定的旋转角度进行往复转动,进一步通过设置于定位转架3k上的定位凸块3m对待康复训练的手臂进行按压敲击,通过定位环3c从手臂上方的反向抱夹作用可进一步提升定位凸块3m对于手臂的按压敲击力度,提升神经康复训练的训练效果。
所述的振动机构4包括振动转盘4a、限位架4b、限位滑槽4c、连接轴4d、复位弹簧4e、振动转环4f、支撑杆4g、支撑座4h、啮合齿4j、振动齿轮4k、升降滑杆4m、升降弹簧4n、升降环4p、升降块4q和振动单元4r,定位底板3a上安装有振动转盘4a,振动转盘4a的侧壁上沿其周向均匀设置有限位架4b,位于限位架4b内侧的振动转盘4a上通过滑动配合的方式安装有振动转环4f,且振动转环4f与振动转盘4a之间通过复位弹簧4e相连接,振动转盘4a上沿其周向均匀设置有连接轴4d,振动转环上沿其周向均匀开设有限位滑槽4c,连接轴4d位于限位滑槽4c内且连接轴4d与振动转环滑动配合,振动转环的下端侧壁沿其周向均匀设置有啮合齿4j,定位转轴3f上通过花键安装有振动齿轮4k,振动齿轮4k位于振动转环下方且振动齿轮4k与啮合齿4j啮合传动,所述的振动齿轮4k为不完全齿轮,通过振动齿轮4k与啮合齿4j之间的间歇啮合传动实现控制振动转环4f的间歇往复转动,位于啮合齿4j上方的振动转环上均匀安装有支撑杆4g,支撑杆4g的端部安装有支撑座4h,支撑座4h通过滑动配合的方式抵靠在安装底板1上,位于支撑杆4g外侧的安装底板1上通过滑动配合的方式均匀安装有多组升降滑杆4m,升降滑杆4m的下端分别通过升降弹簧4n与安装底板1相连接,每组升降滑杆4m之间通过铰接配合的方式均匀安装有多组升降环4p,升降环4p位于支撑杆4g的上方且升降环4p的侧壁上均匀设置有升降块4q,支撑座4h上安装有振动单元4r。
具体工作时,当定位转轴3f进行转动的同时进一步带动振动齿轮4k进行转动,由于振动齿轮4k为不完全齿轮设计,进一步通过振动齿轮4k与啮合齿4j之间的间歇啮合传动带动振动转环4f沿着限位架4b进行一定角度内的往复转动,进一步通过支撑座4h带动待康复训练的手臂再一定角度内进行往复转动,设置的复位弹簧4e可通过自身弹力在振动齿轮4k解除与啮合齿4j之间的啮合作用后推动振动转环4f及时进行复位,并使振动转环4f处于居中状态,通过限位滑槽4c与连接轴4d之间的限位滑动配合可实现对振动转环4f的转动角度进行二次限制,进一步实现对待康复训练手臂转动角度的控制,避免单次转动角度过大造成病人的不适应,设置的升降弹簧4n可通过自身弹力向升降滑杆4m施加一个始终向下运动的作用力,进一步带动升降环4p贴合抵靠在待康复训练的手臂上,并通过设置于升降环4p内壁上的升降块4q实现对手臂的二次按压效果,进一步提升神经康复训练时对手臂上神经元按压敲击作用的作用面积以及作用效果。
所述的振动单元4r包括压实环4r1、压实气囊4r2、压实凸块4r3、握持球4r4、橡胶层4r5、握持气囊4r6、振动滑杆4r7和振动弹簧4r8,支撑座4h上通过铰接配合的方式对称安装有压实环4r1,压实环4r1之间设置有压实气囊4r2,压实气囊4r2的侧壁上均匀设置有压实凸块4r3,位于压实气囊4r2下方的支撑座4h上安装有握持球4r4,握持球4r4的外壁套设有橡胶层4r5,所述的橡胶层4r5为柔性橡胶层,橡胶层4r5覆盖在握持球4r4的外表面且橡胶层4r5的外壁上均匀设置有振动凸块,位于橡胶层4r5内侧的握持球4r4侧壁上通过滑动配合的方式均匀安装有振动滑杆4r7,握持球4r4的内部安装有握持气囊4r6,振动滑杆4r7的一端抵靠在橡胶层4r5上,振动滑杆4r7的另一端抵靠在握持气囊4r6上,振动滑杆4r7的中部通过振动弹簧4r8与握持球4r4相连接。
具体工作时,当升降块4q以及定位凸块3m对手臂进行按压的同时,进一步通过现有气泵向压实气囊4r2内注入空气,进一步使压实气囊4r2进行膨胀并贴合到待康复训练的手背上,设置于压实气囊4r2上的压实凸块4r3可进一步通过挤压作用对手背上的神经元进行按压,通过压实气囊4r2膨胀时带来的压力可进一步使病人的手贴合在握持球4r4上,避免因病人手部的神经元受损造成对握持球4r4的不稳定握持,之后,进一步通过现有气泵间断往复的向握持气囊4r6内注入气体,进一步通过握持气囊4r6的往复膨胀作用推动振动滑杆4r7沿着握持球4r4的侧壁进行往复伸缩滑动,设置的振动弹簧4r8可通过自身弹力拉动振动滑杆4r7抵靠在握持气囊4r6的侧壁上,并为振动滑杆4r7的伸缩运动提供一定的回复力,设置于握持球4r4外壁上的柔性橡胶层4r5可为振动滑杆4r7的伸缩运动提供一定的缓冲效果,并通过设置的振动凸块增强对于手心的按压效果,进一步提升神经康复训练的训练效果。
工作时
第一步:将待需要康复训练的整个手臂沿着定位座3b的侧壁进行放入,并依次穿过振动转环4f与升降环4p的内侧,最终进入到压实环4r1的内侧并用手握持握持球4r4,之后通过定位环3c从定位座3b的上方对待康复训练的手臂进行夹持,同时通过现有气泵向压实气囊4r2内注入空气,进一步使压实气囊4r2进行膨胀并贴合到待康复训练的手背上,进一步通过膨胀挤压作用使病人的手贴合在握持球4r4上,设置于压实气囊4r2上的压实凸块4r3可进一步通过挤压作用对手背上的神经元进行按压。
第二步:当病人的手对握持球4r4握紧之后,进一步通过现有气泵间断往复的向握持气囊4r6内注入气体,进一步通过握持气囊4r6的往复膨胀作用推动振动滑杆4r7沿着握持球4r4的侧壁进行往复伸缩滑动,进一步通过振动凸块的往复运动实现对手心的按压效果。
第三步:启动定位电机3e进行转动,进一步通过定位转轴3f带动定位凸轮3g进行同步转动,进一步通过定位滑架3h的铰接传动带动定位转架3k在定位座3b以一定的旋转角度进行往复转动,进一步通过设置于定位转架3k上的定位凸块3m对待康复训练的手臂进行按压敲击。
第四步:当定位转轴3f进行转动的同时进一步通过振动齿轮4k与啮合齿4j之间的间歇啮合传动带动振动转环4f沿着限位架4b进行一定角度内的往复转动,进一步通过支撑座4h带动待康复训练的手臂再一定角度内进行往复转动,设置的升降环4p可在升降弹簧4n的弹力推动下贴合抵靠在待康复训练的手臂上,并通过设置于升降环4p内壁上的升降块4q实现对手臂的二次按压效果。
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中的描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种神经内科康复训练器械
- 一种神经内科护理用手指康复训练器