一种声乐教学用可遥控升降的乐谱架
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及乐谱架技术领域,特别涉及一种声乐教学用可遥控升降的乐谱架。
背景技术
乐谱架顾名思义是用来放置乐谱的架子,声乐教学中需要使用到乐谱架,教师将乐谱放置在乐谱架上,看着乐谱架进行演奏,起到示范作用。
目前出现了一些遥控升降的乐谱架,先将乐谱固定在倾斜的支撑板上,随后教师可以根据自己的身高用遥控调节乐谱架的高度,从而使乐谱架能够升降。
但在相关技术中,乐谱架的升降高度单纯依靠教师通过遥控器进行调节使乐谱架上用于放置乐谱的支撑板大致处于头部所在的高度,在上课前,教师则根据自己的经验或直观的观察来判断乐谱架的高度是否合适,这种调节往往较为粗略,而在声乐教学中,往往需要长时间看乐谱进行反复示范,在教学过程中,如果乐谱架上用于放置乐谱的支撑板与教师的距离不合适则无需要重新进行调整,这样教师就必须停下来用遥控器再次进行调整,若教师想要调整至最佳位置,可能需要多次反复进行调整,从而影响上课进度。
发明内容
本发明提供的一种声乐教学用可遥控升降的乐谱架,能够让教师先通过遥控器粗略调整乐谱架高度后自动进行二次精确调整乐谱架上支撑板高度。
本发明提供了一种声乐教学用可遥控升降的乐谱架,包括:
底座、遥控升降部和支撑板;
站立板,垂直固连于底座的下端面,站立板上设置有双脚放置槽;
转动部,与支撑板连接,用于使支撑板转动至竖直方向或与水平面之间倾斜的固定角度;
竖直升降部,设置于遥控升降部和支撑板之间,能够带动支撑板沿竖直方向升降;
人脸识别模块,设置于支撑板的中心处,用于实时检测站立在站立板上的教师的面部是否正对人脸识别模块;
处理器,分别与竖直升降部和人脸识别模块信号连接;
供电模块,分别与转动部、竖直升降部和处理器电连接;
操作面板,设于支撑板的一侧边,用于分别控制人脸识别模块及供电模块的开启或关闭;
当教师站立在站立板上,竖直升降部带动人脸识别模块向上移动,当人脸识别模块识别到教师的面部正对人脸识别模块后,则处理器控制竖直升降部停止升降,并控制转动部使支撑板从竖直方向转动至固定角度。
可选的,竖直升降部包括:
套筒,竖直连接于遥控升降部的上端;
第一电机,固定于套筒内,输出轴竖直向上,第一电机与供电模块电连接,与处理器信号连接;
螺杆,竖直设置于套筒内,下端与第一电机的输出轴轴连接;
螺母,螺接于螺杆上,并与套筒的内侧壁沿竖直方向滑动连接;
多个牵引杆,竖直设置,下端与螺母固连,上端与支撑板连接。
可选的,还包括设置于竖直升降部和支撑板之间的水平移动部,支撑板上还设有测距传感器,测距传感器用于检测支撑板到教师之间的距离时,水平移动部与供电模块电连接,水平移动部及测距传感器分别与处理器信号连接,当处理器接收到测距传感器检测的距离值时,将距离值与预设距离值进行比较,当距离值大于预设距离值,则处理器控制水平移动部带动支撑板向靠近教师方向移动直至距离值与预设距离值相等,当距离值小于预设距离值,则处理器控制水平移动部带动支撑板向远离教师方向移动直至距离值与预设距离值相等。
可选的,水平移动部包括:
壳体,固定于遥控升降部的上端,壳体与供电模块电连接,与处理器信号连接;
第二电机,固定于壳体内,输出轴竖直向上;
主动齿轮,套接于第二电机的输出轴上;
第一齿条,与壳体的下端面沿前后方向滑动连接,并与主动齿轮啮合,第一齿条与竖直升降部的下端固连。
可选的,水平移动部还包括:
第二齿条,与第一齿条平行设置且固连;
从动齿轮,与主动齿轮对称设于第二齿条远离第一齿条的一侧,且通过转动轴与壳体的底壁铰接。
可选的,第一齿条与竖直升降部的下端通过支撑柱固连。
可选的,转动部包括:
两个铰接座,分别固连于壳体和支撑板的后端面;
电动伸缩杆,两端分别与铰接座连接,电动伸缩杆与供电模块电连接,与处理器信号连接。
可选的,双脚放置槽的前后侧壁上分别相对设置有限位件。
可选的,限位件包括:
限位槽,分别设于支撑板内,限位槽与双脚放置槽连通;
弹簧,设置于限位槽内,一端与限位槽的槽底固连;
移动块,与弹簧的另一端固连,侧壁与限位槽滑动连接;
弧形限位片,固连于移动块远离弹簧的一端,弧形限位片始终位于双脚放置槽内。
与现有技术相比,本发明的有益效果在于:本发明提供的一种声乐教学用可遥控升降的乐谱架初始状态时支撑板与水平面垂直,当教师通过遥控器控制遥控升降部完成初次的粗略高度调整后,教师站在站立板上,并将双脚分别放置在双脚放置槽内,面向支撑板,通过操作面板打开供电模块及人脸识别模块,教师随后目视前方,竖直升降部开始上升直至人脸识别模块识别到所述教师的面部正对人脸识别模块后,则处理器控制竖直升降部停止升降,此时完成二次高度调整,并控制转动部使支撑板从竖直方向转动至固定角度,此固定角度为支撑板使用状态时的倾斜角度,当上完课后,教师通过操作面板关闭供电模块及面部识别模块,则竖直升降部恢复初始位置即最低点出,转动部转动至初始位置即支撑板与水平面垂直。
附图说明
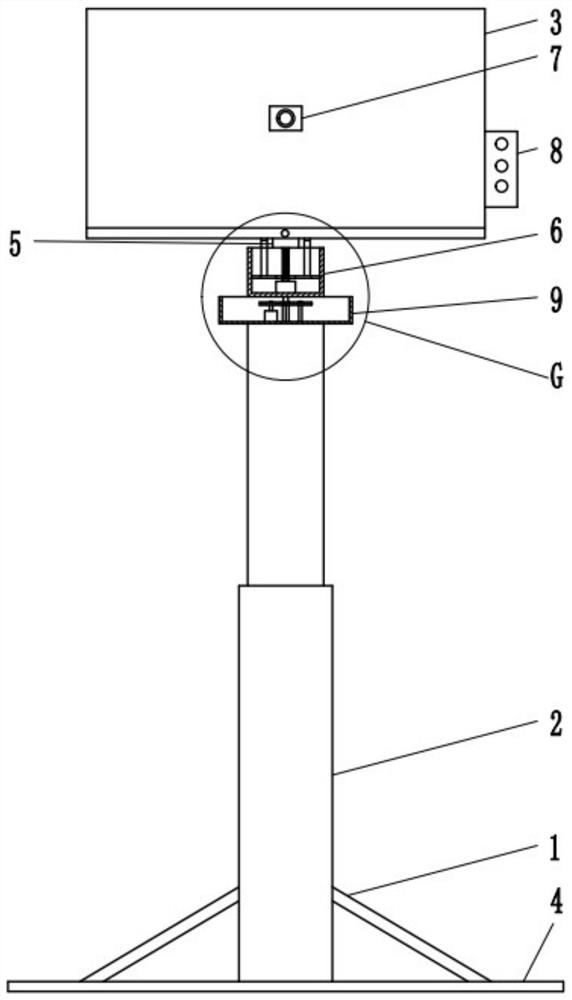
图1为本发明实施例提供的一种声乐教学用可遥控升降的乐谱架的主视图;
图2为本发明实施例提供的一种声乐教学用可遥控升降的乐谱架的左视图;
图3为本发明实施例提供的站立板的俯视图;
图4为图1中G处的局部结构放大示意图;
图5为本发明实施例提供的水平移动部的俯视图;
图6为图3中K处的局部结构放大示意图。
具体实施方式
下面结合附图,对本发明的一个具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明的技术方案和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
如图1-3所示,本发明实施例提供的一种声乐教学用可遥控升降的乐谱架,包括:底座1、遥控升降部2、支撑板3、站立板4、转动部5、竖直升降部6、人脸识别模块7、处理器、供电模块和操作面板8,站立板4垂直固连于底座1的下端面,站立板4上设置有双脚放置槽400,转动部5与支撑板3连接,用于使支撑板3转动至竖直方向或与水平面之间倾斜的固定角度,竖直升降部6设置于遥控升降部2和支撑板3之间,能够带动支撑板3沿竖直方向升降,人脸识别模块7设置于支撑板3的中心处,用于实时检测站立在站立板4上的教师的面部是否正对人脸识别模块7,处理器分别与竖直升降部6和人脸识别模块7信号连接,供电模块分别与转动部5、竖直升降部6和处理器电连接,操作面板8设于支撑板3的一侧边,用于分别控制人脸识别模块7及供电模块的开启或关闭,当教师站立在站立板4上竖直升降部6带动人脸识别模块7向上移动,当人脸识别模块7识别到教师的面部正对人脸识别模块7后,则处理器控制竖直升降部6停止升降,并控制转动部5使支撑板3从竖直方向转动至固定角度。
本发明提供的一种声乐教学用可遥控升降的乐谱架初始状态时支撑板与水平面垂直,当教师通过遥控器控制遥控升降部完成初次的粗略高度调整后,教师站在站立板上,并将双脚分别放置在双脚放置槽内,面向支撑板,通过操作面板打开供电模块及人脸识别模块,教师随后目视前方,竖直升降部开始上升直至人脸识别模块识别到所述教师的面部正对人脸识别模块后,则处理器控制竖直升降部停止升降,此时完成二次高度调整,并控制转动部使支撑板从竖直方向转动至固定角度,此固定角度为支撑板使用状态时的倾斜角度,当上完课后,教师通过操作面板关闭供电模块及面部识别模块,则竖直升降部恢复初始位置即最低点出,转动部转动至初始位置即支撑板与水平面垂直。
在本实施例中,参考图4,竖直升降部6包括:套筒600、第一电机610、螺杆620、螺母630和多个牵引杆640,套筒600竖直连接于遥控升降部2的上端,第一电机610固定于套筒600内,输出轴竖直向上,第一电机610与供电模块电连接,与处理器信号连接,螺杆620竖直设置于套筒600内,下端与第一电机610的输出轴轴连接,螺母630螺接于螺杆620上,并与套筒600的内侧壁沿竖直方向滑动连接,多个牵引杆640竖直设置,下端与螺母630固连,上端与支撑板3连接,在本实施例中,牵引杆640的上端通过转轴650与支撑板3的下端铰接,使支撑板3能够向后倾斜。
供电模块开启后,第一电机610转动,带动螺杆620转动,从而带动螺母630上移,多个牵引杆640则推动支撑板3上移,直至人脸识别模块7检测到教师的面部正对支撑板3的中心后,则处理器控制第一电机610停止转动,此时二次高度调整完成。
参考图4-5,由于教师站立好后可能相对于支撑板3的距离稍微偏远或偏近,为了使教师在水平方向上与支撑板3的距离最佳,本发明还包括设置于竖直升降部6和支撑板3之间的水平移动部9,支撑板3上还设有测距传感器310,测距传感器310用于检测支撑板3到教师之间的距离时,水平移动部9与供电模块电连接,水平移动部9及测距传感器310分别与处理器信号连接,当处理器接收到测距传感器310检测的距离值时,将距离值与预设距离值进行比较,当距离值大于预设距离值,则处理器控制水平移动部9带动支撑板3向靠近教师方向移动直至距离值与预设距离值相等,当距离值小于预设距离值,则处理器控制水平移动部9带动支撑板3向远离教师方向移动直至距离值与预设距离值相等。
在本实施例中,水平移动部9包括:壳体900、第二电机910、主动齿轮920和第一齿条930,壳体900固定于遥控升降部2的上端,壳体900与供电模块电连接,与处理器信号连接,第二电机910固定于壳体900内,输出轴竖直向上,主动齿轮920套接于第二电机910的输出轴上,第一齿条930与壳体900的下端面沿前后方向滑动连接,并与主动齿轮920啮合,第一齿条930与竖直升降部6的下端固连。
供电模块开启后,测距传感器310将教师与支撑板3之间的距离传递给处理器,当距离过近时,处理器控制第二电机910转动,则主动齿轮920同步转动,带动与其啮合的第一齿条930向远离教师的方向移动从而带动竖直升降部6及其上的支撑板3同向移动,直至测距传感器310检测到教师与支撑板3之间的距离等于预设距离值时,则处理器控制第二电机910停止转动,若距离过远,则处理器控制第二电机910反向转动,则主动齿轮920同步转动,带动与其啮合的第一齿条930向靠近教师的方向移动从而带动竖直升降部6及其上的支撑板3同向移动,直至测距传感器310检测到教师与支撑板3之间的距离等于预设距离值时,则处理器控制第二电机910停止转动。
可选的,水平移动部9还包括:第二齿条940和从动齿轮950,第二齿条940与第一齿条930平行设置且固连,从动齿轮950与主动齿轮920对称设于第二齿条940远离第一齿条930的一侧,且通过转动轴960与壳体900的底壁铰接,第二齿条940和从动齿轮950保证了竖直升降部6在上下移动过程中的稳定受力。
可选的,第一齿条930与竖直升降部6的下端通过支撑柱970固连。
可选的,转动部5包括:两个铰接座500、电动伸缩杆510,两个铰接座500分别固连于壳体900和支撑板3的后端面,电动伸缩杆510两端分别与铰接座500连接,电动伸缩杆510与供电模块电连接,与处理器信号连接。
当完成二次高度调整和上述水平距离调整后,处理器控制电动伸缩杆510缩短固定距离,则带动支撑板3向后倾斜一定角度,随后将乐谱放置在支撑板3上即可。
为了进一步保证教师在上课过程中与支撑板3保持最佳距离,则教师的位置尽量保持不变,参考图6,本发明双脚放置槽400的前后侧壁上分别相对设置有限位件10。
可选的,限位件10包括:限位槽110、弹簧120、移动块130和弧形限位片140,限位槽110分别设于支撑板3内,限位槽110与双脚放置槽400连通,弹簧120设置于限位槽110内,一端与限位槽110的槽底固连,移动块130与弹簧120的另一端固连,侧壁与限位槽110滑动连接,弧形限位片140固连于移动块130远离弹簧120的一端,弧形限位片140始终位于双脚放置槽400内,教师将将双脚放置在双脚放置槽400内,弧形限位片140在弹簧120的弹力作用下分别抵接脚的前后端。
以上公开的仅为本发明的几个具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
- 一种可遥控升降的声乐教学用乐谱架
- 声乐教学用可遥控升降的乐谱架