电动助力车谐波传动系统
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及一种电动助力车谐波传动系统,尤指一种具有一谐波减速器的电动助力车传动系统。
背景技术
请参阅图7,其是现有技术的电动助力车的行星齿轮传动装置的一具体实施例的剖面示意图。行星齿轮传动装置9包括一电动马达92、一中空连接轴93、一制动装置98、一空心轮94、一中心轮96、三个行星齿轮95以及一行星齿轮架99。请同时参阅图8,其是图7现有技术的实施例的局部放大剖面示意图。空心轮94具有一内齿轮以及一外齿轮。中心轮96具有一外齿轮。三个行星齿轮95分别具有一外齿轮。三个行星齿轮95分别与空心轮94的内齿轮以及中心轮96的外齿轮啮合。行星齿轮架99分别与三个行星齿轮95相连接。空心轮94的外齿轮与一电动助力车的一链条97的链节啮合。电动助力车的一中轴91穿过中空连接轴93中心,而与行星齿轮架99固定连接。中空连接轴93与电动马达92固定连接,也同时与中心轮96固定连接。现有技术使用行星齿轮传动装置9,主要有减速比较低、重量较重、体积较大、噪音较大以及传动精度较低等缺点。由于其减速比较低、重量较重等问题,因此对于电动马达的需求功率较大,进而影响电池的续航力。此外,噪音较大以及传动精度较低等则会影响使用者骑乘时的舒适度。再者,体积较大会影响电动助力车的外观美学设计。
发明内容
有鉴于此,本发明人开发出简便组装的设计,能够避免上述的缺点,安装方便,又具有成本低廉的优点,以兼顾使用弹性与经济性等考量,因此遂有本发明的产生。
为解决前述问题,以达到所预期的功效,本发明提供一种电动助力车谐波传动系统,设置于一电动助力车的一车架的一五通管内,电动助力车谐波传动系统包括一壳体、一马达定子、一马达转子、至少一第二轴承、一第一单向离合器、一马达出力轴、至少一第一轴承、一柔性轴承、一柔轮、一交叉滚子轴承、一连接件、一第二单向离合器以及一扭力感知器。马达定子固定于壳体上。马达定子具有一内圈。马达转子容置于马达定子的内圈内。马达转子具有一内圈。每一至少一第二轴承具有一内圈。第二单向离合器以及至少一第二轴承容置于马达转子的内圈内。第二单向离合器具有一内圈。马达出力轴具有一内圈。马达出力轴的一第一端容置于第二单向离合器的内圈内以及每一至少一第二轴承的内圈内。马达出力轴的一第二端具有一椭圆状凸轮。其中马达转子、马达定子以及马达出力轴形成一电动马达。至少一第一轴承容置于马达出力轴的第一端的内圈内。每一至少一第一轴承具有一内圈。柔性轴承具有一内圈。柔性轴承供容置马达出力轴的第二端的椭圆状凸轮,使柔性轴承形变为椭圆状。其中马达出力轴的第二端的椭圆状凸轮以及柔性轴承形成一波发生器。柔轮包括一柔轮本体以及一柔轮外延部。柔轮本体具有一内圈。柔轮本体的一第一端具有一外齿轮。波发生器容置于柔轮本体的第一端的内圈内,使柔轮本体的第一端形变为椭圆状。柔轮外延部与柔轮本体的一第二端相连接。柔轮外延部自柔轮本体的第二端向外延伸,使柔轮形成一帽状。交叉滚子轴承包括一交叉滚子轴承内环、一交叉滚子轴承外环以及复数个交叉滚子。其中交叉滚子轴承内环的一第一端固定于壳体上。交叉滚子轴承内环的第一端具有一内齿轮,供与柔轮本体的第一端的外齿轮啮合。交叉滚子轴承内环的一第二端具有一内圈以及一外凹槽。交叉滚子轴承内环的第二端的内圈供容置柔轮本体的第二端。交叉滚子轴承外环具有一内圈以及一内凹槽。交叉滚子轴承外环的内圈供容置交叉滚子轴承内环的第二端。交叉滚子轴承外环的内凹槽位于相对应于交叉滚子轴承内环的外凹槽,使交叉滚子轴承外环的内凹槽以及交叉滚子轴承内环的外凹槽之间形成一交叉滚子容置空间。复数个交叉滚子容置于交叉滚子容置空间内。连接件具有一第一端以及一第二端。柔轮的柔轮外延部分别与交叉滚子轴承外环以及连接件的第一端相连接。连接件的第二端具有一内圈。第一单向离合器容置于连接件的第二端的内圈内。第一单向离合器具有一内圈。扭力感知器具有一内圈。扭力感知器的一第一端容置于第一单向离合器的内圈内。扭力感知器的第一端与电动助力车的一链盘相连接。每一至少一第一轴承的内圈以及扭力感知器的内圈供容置电动助力车的一中轴。扭力感知器的第二端与电动助力车之中轴相连接。
于实施例时,前述的电动助力车谐波传动系统,其中至少一第二轴承包括选自以下群组的至少之一:一滚珠轴承以及一滚针轴承。
于实施例时,前述的电动助力车谐波传动系统,其中扭力感知器的第二端容置于马达出力轴的第二端的内圈内。
于实施例时,前述的电动助力车谐波传动系统,其还包括一第三轴承,其中马达出力轴的第二端还包括一延伸部,连接件的第二端还包括一延伸部,连接件的第二端的延伸部具有一内圈,供容置第三轴承,第三轴承具有一内圈,供容置马达出力轴的第二端的延伸部。
于实施例时,前述的电动助力车谐波传动系统,其中第三轴承包括选自以下群组的至少之一:一滚珠轴承以及一滚针轴承。
于实施例时,前述的电动助力车谐波传动系统,其还包括一第四轴承,其中第四轴承具有一内圈,马达出力轴的第一端容置于第四轴承的内圈内以及马达转子的内圈内,其中第四轴承位于马达转子以及马达出力轴的第二端之间。
于实施例时,前述的电动助力车谐波传动系统,其中第四轴承包括选自以下群组的至少之一:一滚珠轴承以及一滚针轴承。
于实施例时,前述的电动助力车谐波传动系统,其还包括一第五轴承,马达出力轴的第一端还包括一延伸部,其中第五轴承具有一内圈,马达出力轴的第一端的延伸部容置于第五轴承的内圈内。
于实施例时,前述的电动助力车谐波传动系统,其还包括一第一轴用扣环,其中第五轴承具有一第五轴承内环,马达出力轴的第一端还包括一固定部,第一轴用扣环以及马达出力轴的第一端的固定部用以将第五轴承的第五轴承内环固定于马达出力轴上。
于实施例时,前述的电动助力车谐波传动系统,其中第五轴承包括选自以下群组的至少之一:一滚珠轴承以及一滚针轴承。
于实施例时,前述的电动助力车谐波传动系统,其中至少一第一轴承包括选自以下群组的至少之一:一滚珠轴承以及一滚针轴承。
于实施例时,前述的电动助力车谐波传动系统,其中滚珠轴承是一深沟球轴承。
于实施例时,前述的电动助力车谐波传动系统,其还包括一第二轴用扣环,至少一第一轴承具有的一内环,第二轴用扣环用以将至少一第一轴承的内环固定于电动助力车之中轴上。
于实施例时,前述的电动助力车谐波传动系统,其中电动马达包括选自以下群组之一:一无刷直流马达以及一有刷直流马达。
于实施例时,前述的电动助力车谐波传动系统,其还包括一电池,其中电池与电动马达电性连接。
于实施例时,前述的电动助力车谐波传动系统,其中电池是一充电电池。
于实施例时,前述的电动助力车谐波传动系统,其中电池设置于车架的一中管内或一斜管内。
于实施例时,前述的电动助力车谐波传动系统,其中交叉滚子轴承的交叉滚子轴承内环的第一端、柔轮以及波发生器形成一谐波减速器,谐波减速器所具有的一谐波减速器转动轴与马达出力轴所具有的一马达出力转动轴重合。
于实施例时,前述的电动助力车谐波传动系统,其中谐波减速器转动轴与扭力感知器所具有的一输入转动轴重合。
于实施例时,前述的电动助力车谐波传动系统,其中交叉滚子轴承的交叉滚子轴承内环的第一端、柔轮以及波发生器形成一谐波减速器,谐波减速器所具有的一谐波减速器转动轴与扭力感知器所具有的一输入转动轴重合。
本发明的优点在于,能够降低电动助力车谐波传动系统的重量、体积、噪音,且同时提高电动助力车谐波传动系统的减速比,并提高传动精度,进而提高电池续航力、提高骑乘时的舒适度、以及提升外观美学设计。
为进一步了解本发明,以下举较佳的实施例,配合图式、图号,将本发明的具体构成内容及其所达成的功效详细说明如下。
附图说明
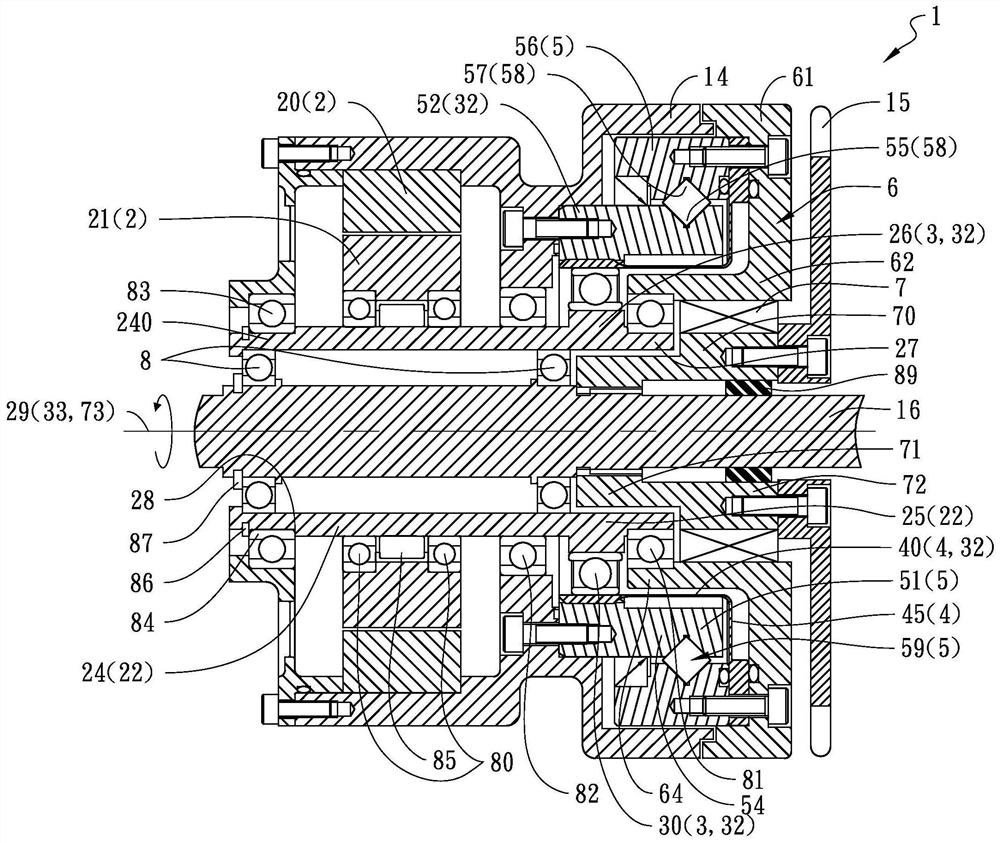
图1是本发明一种电动助力车谐波传动系统的一具体实施例的剖面示意图。
图2是图1的具体实施例的马达出力轴、柔性轴承、柔轮、交叉滚子轴承以及连接件的立体分解图。
图3是图1的具体实施例的交叉滚子轴承、柔轮以及波发生器的组合俯视示意图。
图4是本发明一种电动助力车谐波传动系统设置于电动助力车的车架的一具体实施例的剖面示意图。
图5是本发明一种电动助力车谐波传动系统设置于电动助力车的车架的另一具体实施例的剖面示意图。
图6是本发明一种电动助力车谐波传动系统的四种情境模式的流程示意图。
图7是现有技术的电动助力车的行星齿轮传动装置的一具体实施例的剖面示意图。
图8是图7现有技术的实施例的局部放大剖面示意图。
附图标记说明:1电动助力车谐波传动系统;10车架;11五通管;12中管;13斜管;14壳体;15链盘;16中轴;17单向棘轮;2电动马达;20马达定子;21马达转子;22马达出力轴;23马达出力轴的内圈;24马达出力轴的第一端;240马达出力轴的第一端的延伸部;25马达出力轴的第二端;26椭圆状凸轮;27马达出力轴的第二端的延伸部;28马达出力轴的第一端的固定部;29马达出力转动轴;3波发生器;30柔性轴承;31柔性轴承的内圈;32谐波减速器;33谐波减速器转动轴;4柔轮;40柔轮本体;41柔轮本体的内圈;42柔轮本体的第一端;43外齿轮;44柔轮本体的第二端;45柔轮外延部;5交叉滚子轴承;51交叉滚子轴承内环;52交叉滚子轴承内环的第一端;53内齿轮;54交叉滚子轴承内环的第二端;540交叉滚子轴承内环的第二端的内圈;55外凹槽;56交叉滚子轴承外环;560交叉滚子轴承外环的内圈;57内凹槽;58交叉滚子容置空间;59交叉滚子;6连接件;61连接件的第一端;62连接件的第二端;63连接件的第二端的内圈;64连接件的第二端的延伸部;65连接件的第二端的延伸部的内圈;7第一单向离合器;70扭力感知器;71扭力感知器的第一端;72扭力感知器的第二端;73输入转动轴;8第一轴承;80第二轴承;81第三轴承;82第四轴承;83第五轴承;84第五轴承内环;85第二单向离合器;86第一轴用扣环;87第二轴用扣环;88电池;89铜套;9行星齿轮传动装置;91中轴;92电动马达;93中空连接轴;94空心轮;95行星齿轮;96中心轮;97链条;98制动装置;99行星齿轮架。
具体实施方式
请参阅图1,其是本发明一种电动助力车谐波传动系统的一具体实施例的剖面示意图。本发明的一种电动助力车谐波传动系统1包括一壳体14、一马达定子20、一马达转子21、一马达出力轴22、一柔性轴承30、一柔轮4、一交叉滚子轴承5、一连接件6、两个第一轴承8、两个第二轴承80、一第三轴承81、一第四轴承82、一两个第五轴承83、一第一轴用扣环86、一第二轴用扣环87、一第一单向离合器7、一第二单向离合器85以及一扭力感知器70。电动助力车谐波传动系统1设置于一电动助力车的一车架10的一五通管11内(请参见图4以及图5)。马达定子20固定于壳体14上。马达定子20具有一内圈。马达转子21容置于马达定子20的内圈内。马达转子21具有一内圈。两个第二轴承80以及第二单向离合器85容置于马达转子21的内圈内,其中第二单向离合器85设置于介于两个第二轴承80之间。在一些实施例中,两个第二轴承80包括选自以下群组的至少之一:一滚珠轴承以及一滚针轴承,其中滚珠轴承可为一深沟球轴承。请同时参阅图2,其是图1的实施例的马达出力轴、柔性轴承、柔轮、交叉滚子轴承以及连接件的立体分解图。马达出力轴22具有一第一端24以及一第二端25。马达出力轴22的第一端24包括一固定部28以及一延伸部240。马达出力轴22的第二端25具有一椭圆状凸轮26。马达出力轴22的第二端25还包括一延伸部27。第三轴承81具有一内圈,供容置马达出力轴22的第二端25的延伸部27。在一些实施例中,第三轴承81包括选自以下群组的至少之一:一滚珠轴承以及一滚针轴承,其中滚珠轴承可为一深沟球轴承。第四轴承82具有一内圈。两个第二轴承80分别具有一内圈。第二单向离合器85具有一内圈。第五轴承83具有一内圈。第四轴承82的内圈、两个第二轴承80的内圈以及第二单向离合器85的内圈供容置马达出力轴22的第一端24;第五轴承83的内圈供容置马达出力轴22的第一端24的延伸部240;其中第四轴承82设置于两个第二轴承80的其中之一以及马达出力轴22的第二端25的椭圆状凸轮26之间,第二单向离合器85设置于两个第二轴承80的其中之一以及其中的另一之间,两个第二轴承80的其中的另一设置于第二单向离合器85以及第五轴承83之间。在一些实施例中,第四轴承82包括选自以下群组的至少之一:一滚珠轴承以及一滚针轴承,其中滚珠轴承可为一深沟球轴承。第五轴承83更具有一第五轴承内环84,第一轴用扣环86以及马达出力轴22的第一端24的固定部28用以将第五轴承83的第五轴承内环84固定于马达出力轴22上,以避免轴向位移。在一些实施例中,两个第五轴承83包括选自以下群组的至少之一:一滚珠轴承以及一滚针轴承,其中滚珠轴承可为一深沟球轴承。其中马达转子21、马达定子20、两个第二轴承80、第二单向离合器85以及马达出力轴22形成一电动马达2,其中马达出力轴22具有一马达出力转动轴29。电动马达2包括选自以下群组之一:一无刷直流马达以及一有刷直流马达。柔性轴承30具有一内圈31,供容置马达出力轴22的第二端25的椭圆状凸轮26,使柔性轴承30形变为椭圆状。其中马达出力轴22的第二端25的椭圆状凸轮26以及柔性轴承30形成一波发生器3。柔轮4包括一柔轮本体40以及一柔轮外延部45。柔轮本体40具有一内圈41。柔轮本体40的一第一端42具有一外齿轮43。波发生器3(马达出力轴22的第二端25的椭圆状凸轮26以及柔性轴承30)容置于柔轮本体40的内圈41内相对应于柔轮本体40的第一端42的外齿轮43处,使柔轮本体40的第一端42形变为椭圆状。柔轮外延部45与柔轮本体40的一第二端44相连接。柔轮外延部45自柔轮本体40的第二端44向外延伸,使柔轮4形成一中空的帽状,其中柔轮外延部45是帽缘部分。交叉滚子轴承5包括一交叉滚子轴承内环51、一交叉滚子轴承外环56以及复数个交叉滚子59。交叉滚子轴承内环51的一第一端52固定于壳体14上。交叉滚子轴承内环51的第一端52具有一内齿轮53,供与柔轮本体40的第一端42的外齿轮43啮合。请同时参阅图3,其是图1的具体实施例的交叉滚子轴承、柔轮以及波发生器的组合俯视示意图。其中交叉滚子轴承5的交叉滚子轴承内环51的第一端52(内齿轮53)、柔轮4以及波发生器3(马达出力轴22的第二端25的椭圆状凸轮26以及柔性轴承30)形成一谐波减速器32。谐波减速器32所具有的一谐波减速器转动轴33,其中谐波减速器32所具有的谐波减速器转动轴33与马达出力轴22所具有的马达出力转动轴29重合。交叉滚子轴承内环51的一第二端54具有一内圈540以及一外凹槽55。交叉滚子轴承内环51的第二端54的内圈540供容置柔轮本体40的第二端44。交叉滚子轴承外环56具有一内圈560以及一内凹槽57。交叉滚子轴承外环56的内圈560供容置交叉滚子轴承内环51的第二端54。交叉滚子轴承外环56的内凹槽57位于相对应于交叉滚子轴承内环51的外凹槽55,使交叉滚子轴承外环56的内凹槽57以及交叉滚子轴承内环51的外凹槽55之间形成一交叉滚子容置空间58。复数个交叉滚子59容置于交叉滚子容置空间58内。连接件6具有一第一端61以及一第二端62。柔轮4的柔轮外延部45分别与交叉滚子轴承外环56以及连接件6的第一端61相连接。连接件6的第二端62还包括一延伸部64。连接件6的第二端62以及连接件6的第二端62的延伸部64容置于柔轮本体40的内圈41内靠近柔轮本体40的第二端44处。连接件6的第二端62的延伸部64具有一内圈65。第三轴承81容置于连接件6的第二端62的延伸部64的内圈65内。连接件6的第二端62具有一内圈63。第一单向离合器7容置于连接件6的第二端62的内圈63内。扭力感知器70具有一第一端71以及一第二端72。第一单向离合器7具有一内圈。扭力感知器70的第一端71容置于第一单向离合器7的内圈内。马达出力轴22具有一内圈23。扭力感知器70的第二端72容置于马达出力轴22的内圈23内靠近马达出力轴22的第二端25以及马达出力轴22的第二端25的延伸部27处。两个第一轴承8容置于马达出力轴22的内圈23内靠近马达出力轴22的第一端24处。扭力感知器70的第一端71与电动助力车的一链盘15相连接。扭力感知器70具有一内圈。两个第一轴承8分别具有一内圈。电动助力车的一中轴16容置于两个第一轴承8所分别具有的内圈内以及扭力感知器70的内圈内,且扭力感知器70的第二端72与电动助力车之中轴16相连接。其中至少一个第一轴承8具有一内环,第二轴用扣环87用以将第一轴承8的内环固定于电动助力车之中轴16上,以避免轴向位移。在一些实施例中,两个第一轴承8包括选自以下群组的至少之一:一滚珠轴承以及一滚针轴承,其中滚珠轴承可为一深沟球轴承。其中扭力感知器70具有一输入转动轴73,扭力感知器70所具有的输入转动轴73与谐波减速器32所具有的谐波减速器转动轴33重合,且扭力感知器70所具有的输入转动轴73与马达出力轴22所具有的马达出力转动轴29重合。其中更可增加使用一铜套89,铜套89容置于扭力感知器70的内圈内。铜套89具有一内圈。将电动助力车之中轴16同时容置于两个第一轴承8所分别具有的内圈内、扭力感知器70的内圈内以及铜套89的内圈内,可使电动助力车之中轴16的转动更加稳定,并避免轴向位移。
请参阅图4,其是本发明一种电动助力车谐波传动系统设置于电动助力车的车架的一具体实施例的剖面示意图。在此实施例中,电动助力车谐波传动系统1还包括一电池88,其中电池88与电动助力车谐波传动系统1的电动马达2电性连接。电池88可为一充电电池。电动助力车谐波传动系统1设置于电动助力车的车架10的五通管11内;电池88设置于车架10的一斜管13内。
请参阅图5,其是本发明一种电动助力车谐波传动系统设置于电动助力车的车架的另一具体实施例的剖面示意图。在此实施例中,电动助力车谐波传动系统1还包括一电池88,其中电池88与电动助力车谐波传动系统1的电动马达2电性连接。电池88可为一充电电池。电动助力车谐波传动系统1设置于电动助力车的车架10的五通管11内;电池88设置于车架10的一中管12内。
本发明的电动助力车谐波传动系统1采用谐波减速器32的减速结构,可大幅降低电动助力车谐波传动系统1的体积以及重量,并且可将电动助力车谐波传动系统1设置于电动助力车的车架10的五通管11内。如此设计可提升电动助力车之中轴16、扭力感知器70以及第一单向离合器7等其他零件的设计及配置的灵活性。相较于现有技术将电动助力车谐波传动系统外挂在车架外部,本发明采用此结构可将整个电动助力车谐波传动系统1隐藏至电动助力车的车架10中,可提升外观美学设计。此外,谐波减速器32具有高减速比、啮合率高、体积小、重量轻、低噪音以及高传动精度等特点,可有效地提高电池续航力,高传动精度的电动助力车谐波传动系统1运转平顺,并可提高骑乘时的舒适度。
使用者在骑乘或使用具有本发明的电动助力车谐波传动系统1的电动助力车时,一般有以下四种情境模式。请参阅图6,其是本发明一种电动助力车谐波传动系统的四种情境模式的流程示意图。图6中的线条一、线条二、线条三以及线条四分别代表情境模式一、情境模式二、情境模式三以及情境模式四,其中线条的箭头方向代表带动转动的方向。例如,中轴16与扭力感知器70之间的线条一代表中轴16带动扭力感知器70。情境模式一:是正常骑乘状态。当使用者踩脚踏板使其正向旋转,使电动助力车之中轴16开始正向转动,此时扭力感知器70感测到一转动扭力值,电动马达2即依据此转动扭力值的大小开始转动(电动马达2的输出扭力与转动扭力值相关),而通过谐波减速器32增加扭力感知器70的第一端71于电动助力车的链盘15所输出的扭力,以降低使用者的负担;也即,使用者踩脚踏板正向转动,带动中轴16,带动扭力感知器70,带动链盘15;电动马达2的马达转子21转动,带动第二单向离合器85,带动波发生器3,带动柔轮4,带动连接件6,带动第一单向离合器7,也带动链盘15;而链盘15转动则经由一炼条(图中未显示)带动位于一后轮轮轴(图中未显示)上的一单向棘轮17,再带动一后轮(图中未显示)转动。情境模式二:当使用者欲使脚踏板逆向旋转时(使中轴16逆向旋转),此时第二单向离合器85即发挥作用,使电动马达2的马达出力轴22与电动马达2的马达转子21脱离,而此时扭力感知器70所感测到的扭力值为零(因无负载),故电动马达2的马达转子21即停止转动;也即,使用者踩脚踏板逆向转动,带动中轴16,带动扭力感知器70,带动链盘15,带动单向棘轮17,此时单向棘轮17发挥作用,使后轮不会逆转;而扭力感知器70也带动连接件6,带动柔轮4,带动波发生器3,带动第二单向离合器85,此时第二单向离合器85发挥作用,使电动马达2的马达出力轴22与电动马达2的马达转子21脱离。情境模式三:当电池88没电时电动马达2不会转动,或是当使用者不想使用电动马达2协助时切掉开关使电动马达2不会转动。此时若无第一单向离合器7,则使用者踩脚踏板时,中轴16的正向转动不仅会带着扭力感知器70的转动而使链盘15正向转动,扭力感知器70也会连带着使第一单向离合器7以及谐波减速器32一起转动。然而由于谐波减速器32具有较大的减速比,故使用者踩脚踏板会倍感吃力。因此,在情境模式三下,本发明的电动助力车谐波传动系统1的第一单向离合器7即可发挥作用,使第一单向离合器7与谐波减速器32脱离,如此大幅降低使用者踩脚踏板因连动谐波减速器32所造成的负载;也即,使用者踩脚踏板正向转动,带动中轴16,带动扭力感知器70,带动链盘15,带动单向棘轮17,带动后轮转动;而扭力感知器70也带动第一单向离合器7,此时第一单向离合器7发挥作用,使第一单向离合器7与连接件6(谐波减速器32)脱离。情境模式四:使用者有时需要以牵车的方式倒车,后轮逆转,带动单向棘轮17,带动链盘15,带动扭力感知器70,带动中轴16逆转;由于此时扭力感知器70所感测到的扭力值为零(因无负载),故电动马达2的马达转子21不会转动;而同时扭力感知器70会带动第一单向离合器7,带动连接件6,带动柔轮4,带动波发生器3,带动第二单向离合器85,此时第二单向离合器85发挥作用,使电动马达2的马达出力轴22与电动马达2的马达转子21脱离,如此使牵车的方式倒车不至于卡死。
在一些较佳的实施例中,谐波减速器32具有一减速比,减速比大于或等于20,且小于或等于50。
在一些较佳的实施例中,外齿轮43具有一外齿轮模数。柔性轴承30的内圈31具有一柔性轴承内圈直径。马达出力轴22的第二端25的椭圆状凸轮26具有一长轴以及一短轴,长轴大于短轴。其中长轴大于或等于柔性轴承内圈直径加上1.8倍的外齿轮模数,且小于或等于柔性轴承内圈直径加上2.4倍的外齿轮模数;其中短轴大于或等于柔性轴承内圈直径减去2.4倍的外齿轮模数,且小于或等于柔性轴承内圈直径减去1.8倍的外齿轮模数。
柔轮外齿轮34具有一柔轮外齿齿数。在一些较佳的实施例中,柔轮外齿轮34与刚轮内齿轮40啮合的一啮合齿数大于或等于15%的柔轮外齿齿数,且小于或等于30%的柔轮外齿齿数。
综上所述,依上文所揭示的内容,本发明确可达到发明的预期目的,提供一种电动助力车谐波传动系统,极具产业上利用的价值。
- 电动助力车谐波传动系统
- 一种谐波传动系统及电动助力车