一种伞齿连杆构型仿生假肢
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及仿生手技术领域,特别是涉及一种伞齿连杆构型仿生假肢。
背景技术
随着我国经济的发展和社会的进步,残疾人的合法权益越来越受到人们的重视。手是人体功能最强的肢体之一,能够执行各种日常任务。许多人由于交通事故、触电击伤和工伤等造成截肢。截肢者通常可采用智能假肢替代他们失去的手,重新获得手部功能。
现有仿生假肢多采用丝杠结合平面连杆机构或绳驱动机构实现假肢五指运动。主要存在的问题如下:
1.丝杠结合平面连杆的机构通过丝杆拉曳平面连杆机构实现连杆运动,运动过程不平稳且传动效率低,针对假肢应用场合,整体机构集成度不高。
2.绳驱动机构虽然整体机构集成度高,然而其整体刚度差,负载能力弱,大大限制了绳驱动构型假肢的应用场景。
3.现有的仿生假肢缺少关节运动反馈和力反馈,使得机构仅仅能完成近似手部动作,无法依据精确的关节角度和假肢与抓握物体之间的接触力,实时调整电机输出运动和力,因无反馈信息,可能会导致关节运动不符合正常手部运动,影响使用体验,使得抓握东西不牢固,容易脱落,影响安全性。
发明内容
鉴于以上所述现有技术的缺点,本发明的目的在于提供一种仿生假肢,用于解决现有技术中的仿生假肢存在传动效率低、整体机构集成度不高、刚度差,负载能力弱的技术问题。
为实现上述目的及其他相关目的,本发明提供一种伞齿连杆构型仿生假肢,包括:
前臂件;
手部壳体,设置于所述前臂件的一端;
至少一手指部件,设置于所述手部壳体的远离所述前臂件的一端;
其中,所述手指部件包括驱动机构、伞齿连杆传动部件和手指机构,所述驱动机构安装于所述手部壳体内,所述手指机构通过所述伞齿连杆传动部件与所述驱动机构的输出轴连接。
在一可选实施例中,所述伞齿连杆构型仿生假肢还包括掌腕连接件,所述掌腕连接件的一端与所述前臂件连接,所述掌腕连接件的另一端与所述手部壳体的一端连接。
在一可选实施例中,所述伞齿连杆传动部件包括:
掌指关节基座,安装固定于所述手部壳体的远离所述前臂件的一端,所述驱动机构安装固定于所述掌指关节基座上;
主动伞齿轮,设置于所述掌指关节基座的远离所述驱动机构的一侧,所述主动伞齿轮安装于所述驱动机构的输出轴上;
从动伞齿轮,所述从动伞齿轮通过第一转轴转动安装于所述掌指关节基座上,且所述从动伞齿轮设置于所述主动伞齿轮的一侧;
掌指关节摇杆,一端固定连接于所述第一转轴上,另一端与所述手指机构的靠近所述掌指关节基座的一侧的靠近手背的一端通过第二转轴转动连接;
掌指关节连杆,一端通过第三转轴转动连接于所述掌指关节基座上,另一端与所述手指机构的靠近所述掌指关节基座的一侧的靠近手掌的一端通过第四转轴转动连接。
在一可选实施例中,所述掌指关节基座包括基座底板和设置于所述基座底板两侧的基座立板,所述驱动机构安装固定于所述基座底板上,所述主动伞齿轮设置于所述基座底板的远离所述驱动机构的一侧。
在一可选实施例中,所述掌指关节摇杆包括平行设置的一对摇杆立杆和连接于所述一对摇杆立杆的远离所述掌指关节基座的一端的限位挡板。
在一可选实施例中,所述掌指关节连杆包括两个,两个所述掌指关节连杆相互平行。
在一可选实施例中,所述伞齿连杆传动部件还包括至少一关节角度传感器,所述关节角度传感器设置于所述掌指关节摇杆的靠近所述第二转轴的端部一侧。
在一可选实施例中,所述关节角度传感器包括磁编码器,所述磁编码器的磁盘设置于第二转轴的端部,所述磁盘可随所述第二转轴同步转动。
在一可选实施例中,所述伞齿连杆构型仿生假肢还包括至少一薄膜压力传感器,设置于所述手指机构的朝向手掌的一侧。
在一可选实施例中,所述伞齿连杆构型仿生假肢包括五个手指部件,分别是大拇指部件、食指部件、中指部件、无名指部件以及小拇指部件。
在一可选实施例中,所述手部壳体包括相对设置的手掌壳体和手背壳体,所述大拇指部件的所述驱动机构安装固定于所述手掌壳体上,所述食指部件、所述中指部件、所述无名指部件以及所述小拇指部件的所述驱动机构安装固定于所述手背壳体上。
本发明的伞齿连杆构型仿生假肢,通过引入伞齿轮结合平面连杆机构,实现直流伺服电机直接驱动连杆机构铰链,带动对应的手指运动,避免了引入丝杠和其他曳引机构,整体结构紧凑,而且齿轮传动形式处传动效率高。
本发明的伞齿连杆构型仿生假肢,通过引入双边支撑的连杆机构,配合齿轮机构,保证整体刚度好,负载能力强。
本发明的伞齿连杆构型仿生假肢,配合直流伺服电机及引入的关节角度传感器,保证传动过程运动精确可控且平稳。
本发明的伞齿连杆构型仿生假肢,通过引入关节角度传感器和薄膜力传感器,实现手指关节运动反馈和假肢抓握物体时,假肢与抓握物体之间的接触力反馈,通过配合PID控制算法,实现手指关节运动的准确控制和假肢抓握力的精确控制,安全性高,避免抓握物体不牢固导致的安全问题。
本发明的伞齿连杆构型仿生假肢,通过将食指部件、中指部件、无名指部件、小拇指部件对应的驱动机构布置于手背壳体,将大拇指部件对应的驱动机构布置于手掌壳体,结合微型磁编码器和薄膜力传感器,能够实现在非常有限空间内的运动和力的伺服反馈,整体结构紧凑。
附图说明
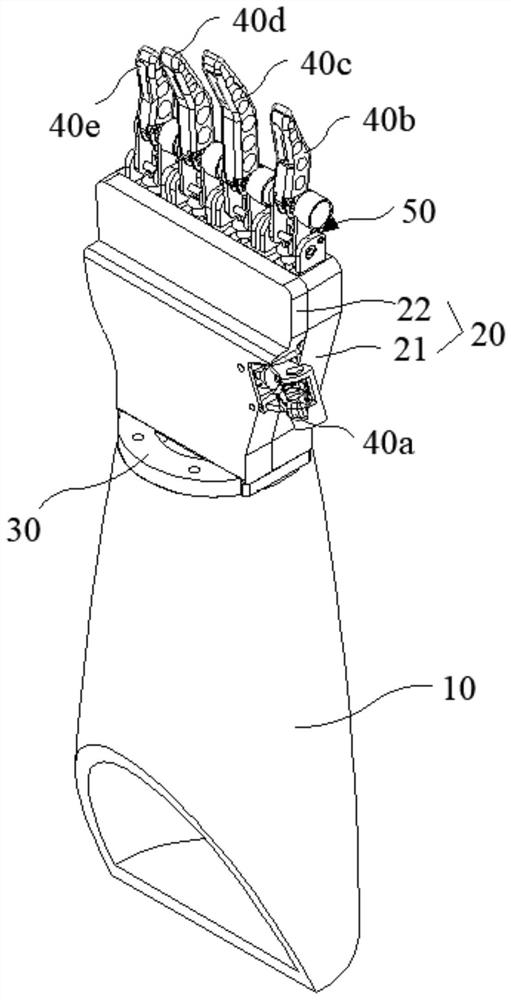
图1显示为本申请的伞齿连杆构型仿生假肢的立体结构示意图。
图2显示为本申请的伞齿连杆构型仿生假肢去除手掌后的立体结构示意图。
图3显示为本申请的伞齿连杆构型仿生假肢去除手背后的立体结构示意图。
图4显示为本申请的伞齿连杆构型假肢机的无名指模块的立体结构示意图。
图5显示为图4的圆圈区域的局部放大图。
图6显示为本申请的伞齿连杆构型假肢机的无名指模块的后视图。
图7显示为本申请的伞齿连杆构型假肢机的无名指模块的侧视图。
图8显示为本申请的伞齿连杆构型假肢机的无名指模块的前视图。
元件标号说明
10、前臂件;20、手部壳体;21、手掌壳体;22、手背壳体;30、掌腕连接件;40a、大拇指机构;40b、食指机构;40c、中指机构;40d、无名指机构;40e、小拇指机构;50、驱动传动部件;51、直流伺服电机;52、掌指关节基座;521、基座底板;522、基座立板;53、主动伞齿轮;54、从动伞齿轮;55a、第一滚动轴承;55b、第三滚动轴承;55c、第四滚动轴承;56a、第一转轴;56b、第三转轴;56c、第四转轴;57、掌指关节摇杆;571、摇杆立杆;572、限位挡板;58、掌指关节连杆;60、微型磁编码器;70、薄膜压力传感器。
具体实施方式
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图示中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
为了解决现有技术中的仿生假肢存在传动效率低、整体机构集成度不高、刚度差,负载能力弱的问题问题,本发明的实施例介绍一种如图1-8所示的伞齿连杆构型仿生假肢,所述仿生假肢包括前臂件10、手部壳体20及五个手指部件,所述手部壳体20的底端可通过掌腕连接件30与前臂件10的顶端连接,所述五个手指机构分别按照人体的实际手指布局安装于所述手掌壳体21的对应位置。其中,图1示出了本发明的实施例的伞齿连杆构型仿生假肢的立体结构示意图,图2示出了本发明的实施例的伞齿连杆构型仿生假肢去除手掌后的立体结构示意图;图3示出了本发明的实施例的伞齿连杆构型仿生假肢去除手背后的立体结构示意图;图4示出了本发明的实施例的伞齿连杆构型假肢机的无名指模块的立体结构示意图;图5示出了图4的圆圈区域的局部放大图;图6示出了本发明的实施例的伞齿连杆构型假肢机的无名指模块的后视图;图7示出了本发明的实施例的伞齿连杆构型假肢机的无名指模块的侧视图;图8示出了本发明的实施例的伞齿连杆构型假肢机的无名指模块的前视图。下面将结合具体地附图来说明本发明的技术方案。
请参阅图1-图8所示,在本实施例中,所述手部壳体20包括手掌壳体21和手背壳体22,所述手掌壳体21和手背壳体22相对设置并通过螺栓连接固定在一起,从而使两者共同围成一个容纳腔体,该容纳腔体用于容置安装后文将要介绍的用于驱动各手指机构的驱动部件。
请参阅图1-图8所示,在本实施例中,所述伞齿连杆构型仿生假肢包括五个手指部件,分别是大拇指部件、食指部件、中指部件、无名指部件以及小拇指部件。以无名指部件为例进行说明。所述无名指部件包括无名指机构40d和用于驱动所述手无名指机构40d的驱动传动机构,所述驱动传动机构包括驱动机构和伞齿连杆传动部件,所述驱动机构安装于所述手部壳体20的容纳腔体内,所述手指机构通过所述伞齿连杆传动部件与所述驱动机构的输出轴连接,从而驱动机构可通过伞齿连杆传动部件带动无名指机构40d运动。所述驱动机构例如可以是直流伺服电机51或者交流伺服电机,譬如直流伺服电机51。所述伞齿连杆传动部件包括掌指关节基座52、主动伞齿轮53、从动伞齿轮54、掌指关节摇杆57以及掌指关节连杆58。
请参阅图1-图8所示,在本实施例中,所述掌指关节基座52安装固定于所述手部壳体20的远离所述前臂件10的一端,所述掌指关节基座52包括基座底板521和设置于所述基座底板521两侧的基座立板522,所述驱动机构安装固定于所述基座底板521上,所述驱动机构安装固定于所述掌指关节基座52的基座底板521上。所述主动伞齿轮53设置于所述掌指关节基座52的基座底板521的远离所述驱动机构的一侧,所述主动伞齿轮53安装于所述驱动机构的输出轴上。所述从动伞齿轮54通过第一转轴56a转动安装于所述掌指关节基座52的两个基座立板522之间,所述第一转轴56a的两端分别与所述掌指关节基座52的一对基座立板522的靠近手掌壳体21的一端通过滚动轴承55a连接,且所述从动伞齿轮54位于所述主动伞齿轮53的一侧以与所述主动伞齿轮53配合传动。所述掌指关节摇杆57的一端固定连接于所述第一转轴56a上,另一端与所述无名指机构40d的靠近所述掌指关节基座52的一侧的靠近手背的一端的第一连接凸块(未标示)通过第二转轴(未图示)转动连接,所述第二转轴的两端分别与所述掌指关节基座52的一对基座立板522的顶端通过第二滚动轴承(未图示)连接;所述掌指关节连杆58的一端通过第三转轴56b转动连接于所述掌指关节基座52的两个基座立板522之间,另一端与所述无名指机构40d的靠近所述掌指关节基座52的一侧的靠近手掌壳体21的一端的第二连接凸块(未标示)通过第四转轴56c转动连接,所述第三转轴56b的两端分别与两个基座立板522的远离手掌壳体21的一端通过第三滚动轴承55b连接,所述第四转轴56c的两端分别与两个掌指关节连杆58的上端通过第四滚动轴承55c连接。运动时,通过驱动机构带动主动伞齿轮53,主动伞齿轮53带动从动伞齿轮54,从动伞齿轮54的运动构成了连杆机构的铰链旋转运动,从动伞齿轮54的旋转运动带动掌指关节摇杆57运动,掌指关节摇杆57和掌指关节连杆58、掌指关节基座52、无名指机构40d构成四杆机构,掌指关节摇杆57作为原动件,通过四杆机构带动无名指机构40d运动。通过引入伞齿轮结合平面连杆机构,实现直流伺服电机51直接驱动连杆机构铰链,带动对应的手指运动,避免了引入丝杠和其他曳引机构,整体结构紧凑,而且齿轮传动形式传动效率高。需要说明的是,所述伞齿连杆构型仿生假肢的其他手指部件(大拇指部件、食指部件、中指部件以及小拇指部件)与无名指部件的结构和运动方式类似,故不再一一描述。
请参阅图1-图8所示,在一个优选实施例中,所述掌指关节摇杆57包括包括一对平行设置的摇杆立杆571和连接于所述一对摇杆立杆571的远离所述掌指关节基座52的一端(上端)的靠近手背壳体22一侧的限位挡板572,所述限位挡板572可以限制对应的手指结构在朝向手背壳体22一侧运动的位置,所述一对摇杆立杆571分别邻近所述掌指关节基座52的两个基座立板522的内侧设置,而从动伞齿轮54位于两个摇杆立杆571之间。所述掌指关节连杆58也同样包括两个,其大致具有“S”型结构,两个所述掌指关节连杆58相互平行布置,且分别位于一对摇杆立杆571之间。通过引入双边支撑的连杆机构(掌指关节摇杆57、掌指关节连杆58及掌指关节基座52),配合齿轮机构,保证整体刚度好,负载能力强。
请参阅图1-图8所示,在本实施例中,所述伞齿连杆构型仿生假肢的大拇指部件的驱动机构(直流伺服电机51)安装固定于所述手掌壳体21上,而其他手指部件(食指部件、中指部件、无名指部件以及小拇指部件)的驱动机构(直流伺服电机51)安装固定于所述手背壳体22上。通过这种设计,并结合后文将要介绍的微型磁编码器60和薄膜力传感器,能够实现在非常有限空间内的运动和力的伺服反馈,整体结构更紧凑。
请参阅图1-图8所示,在本实施例中,所述伞齿连杆传动部件还包括用于测量手指旋转关节的角度(定义为手指机构运动过程中,手指机构相对于掌指关节摇杆57的旋转角度)的关节角度传感器,所述关节角度传感器设置于所述掌指关节摇杆57的靠近所述第二转轴的端部一侧,所述关节角度传感器例如可以是微型磁编码器60,所述关节角度传感器例如可以包括五个,分别对应测量大拇指部件、食指部件、中指部件、无名指部件以及小拇指部件的手指旋转关节的角度。作为示例,所述微型磁编码器60包括磁盘、传感器和调节电路,磁盘已磁化,设置于第二转轴的端部,从而所述磁盘可随所述第二转轴同步转动,所述磁盘的圆周上有许多磁极;传感器检测磁盘旋转时磁场的变化,并将此信息转换为正弦波,传感器可以是感应电压变化的霍尔效应器件,也可以是感应磁场变化的磁阻器件。
请参阅图1-图8所示,在本实施例中,所述伞齿连杆传动部件还包括用于测量手指机构接触物体时的接触力的薄膜压力传感器70,所述薄膜压力传感器70例如可以包括五个,分别设置于大拇指机构40a、食指机构40b、中指机构40c、无名指机构40d以及小拇指机构40e的朝向手掌的一侧。其中,图4、图7及图8示出了所述薄膜压力传感器70设置于无名指机构40d的朝向手掌的一侧的情形。
本发明的伞齿连杆构型仿生假肢,通过引入关节角度传感器和薄膜力传感器,实现手指关节运动反馈和假肢抓握物体时,假肢与抓握物体之间的接触力反馈,通过配合PID控制算法,实现手指关节运动的准确控制和假肢抓握力的精确控制,安全性高,避免抓握物体不牢固导致的安全问题。
可以理解的是,在一些实施例中,也可以不设置掌腕连接件30,所述前臂件10与所述手掌腔体直接连接。
可以理解的是,在一些实施例中,所述伞齿连杆构型仿生假肢中的五个手指部件的部分采用伞齿连杆传动部件。
综上所述,本发明的伞齿连杆构型仿生假肢,通过引入伞齿轮结合平面连杆机构,实现直流伺服电机直接驱动连杆机构铰链,带动对应的手指运动,避免了引入丝杠和其他曳引机构,整体结构紧凑,而且齿轮传动形式传动效率高。本发明的伞齿连杆构型仿生假肢,通过引入双边支撑的连杆机构,配合齿轮机构,保证整体刚度好,负载能力强。本发明的伞齿连杆构型仿生假肢,配合直流伺服电机及引入的关节角度传感器,保证传动过程运动精确可控且平稳。本发明的伞齿连杆构型仿生假肢,通过引入关节角度传感器和薄膜力传感器,实现手指关节运动反馈和假肢抓握物体时,假肢与抓握物体之间的接触力反馈,通过配合PID控制算法,实现手指关节运动的准确控制和假肢抓握力的精确控制,安全性高,避免抓握物体不牢固导致的安全问题。本发明的伞齿连杆构型仿生假肢,通过将食指部件、中指部件、无名指部件、小拇指部件对应的驱动机构布置于手背壳体,将大拇指部件对应的驱动机构布置于手掌壳体,结合微型磁编码器和薄膜力传感器,能够实现在非常有限空间内的运动和力的伺服反馈,整体结构紧凑。
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
在本文的描述中,提供了许多特定细节,诸如部件和/或方法的实例,以提供对本发明实施例的完全理解。然而,本领域技术人员将认识到可以在没有一项或多项具体细节的情况下或通过其他设备、系统、组件、方法、部件、材料、零件等等来实践本发明的实施例。在其他情况下,未具体示出或详细描述公知的结构、材料或操作,以避免使本发明实施例的方面变模糊。
在整篇说明书中提到“一个实施例”、“实施例”或“具体实施例”意指与结合实施例描述的特定特征、结构或特性包括在本发明的至少一个实施例中,并且不一定在所有实施例中。因而,在整篇说明书中不同地方的短语“在一个实施例中”、“在实施例中”或“在具体实施例中”的各个表象不一定是指相同的实施例。此外,本发明的任何具体实施例的特定特征、结构或特性可以按任何合适的方式与一个或多个其他实施例结合。应当理解本文所述和所示的发明实施例的其他变型和修改可能是根据本文教导的,并将被视作本发明精神和范围的一部分。
还应当理解还可以以更分离或更整合的方式实施附图所示元件中的一个或多个,或者甚至因为在某些情况下不能操作而被移除或因为可以根据特定应用是有用的而被提供。
另外,除非另外明确指明,附图中的任何标志箭头应当仅被视为示例性的,而并非限制。此外,除非另外指明,本文所用的术语“或”一般意在表示“和/或”。在术语因提供分离或组合能力是不清楚的而被预见的情况下,部件或步骤的组合也将视为已被指明。
如在本文的描述和在下面整篇权利要求书中所用,除非另外指明,“一个”、和“该”包括复数参考物。同样,如在本文的描述和在下面整篇权利要求书中所用,除非另外指明,“在…中”的意思包括“在…中”和“在…上”。
本发明所示实施例的上述描述(包括在说明书摘要中所述的内容)并非意在详尽列举或将本发明限制到本文所公开的精确形式。尽管在本文仅为说明的目的而描述了本发明的具体实施例和本发明的实例,但是正如本领域技术人员将认识和理解的,各种等效修改是可以在本发明的精神和范围内的。如所指出的,可以按照本发明所述实施例的上述描述来对本发明进行这些修改,并且这些修改将在本发明的精神和范围内。
本文已经在总体上将系统和方法描述为有助于理解本发明的细节。此外,已经给出了各种具体细节以提供本发明实施例的总体理解。然而,相关领域的技术人员将会认识到,本发明的实施例可以在没有一个或多个具体细节的情况下进行实践,或者利用其它装置、系统、配件、方法、组件、材料、部分等进行实践。在其它情况下,并未特别示出或详细描述公知结构、材料和/或操作以避免对本发明实施例的各方面造成混淆。
因而,尽管本发明在本文已参照其具体实施例进行描述,但是修改自由、各种改变和替换亦在上述公开内,并且应当理解,在某些情况下,在未背离所提出发明的范围和精神的前提下,在没有对应使用其他特征的情况下将采用本发明的一些特征。因此,可以进行许多修改,以使特定环境或材料适应本发明的实质范围和精神。本发明并非意在限制到在下面权利要求书中使用的特定术语和/或作为设想用以执行本发明的最佳方式公开的具体实施例,但是本发明将包括落入所附权利要求书范围内的任何和所有实施例及等同物。因而,本发明的范围将只由所附的权利要求书进行确定。
- 一种伞齿连杆构型仿生假肢
- 一种驱动绳索与四连杆机构组合式欠驱动仿生假肢手指